6.9 Moment of inertia
Rotation
We will discuss rotational motion, i.e. the motion of an object around its own axis and the variables which describe rotational motion. Motion of wheels, gears, motors, planets, the hands of a clock, the rotor of jet engines, blades of helicopters, etc. are examples of rotational motion.
Rigid body
Ideally, a body is said to be a rigid body when it has a definite shape and size. For a rigid body, it is considered that its constituent particles do not change their mutual distances even when an external force is applied on it.
e.g. A wheel can be considered as rigid body by ignoring a little change in its shape.
Motion of rigid body
A rigid body can possess pure translational motion, pure rotational motion or a combination of both of these motions. We have discussed translational motion, i.e. the motion of an object along a line (both straight and curved). So, here we will study about the rotational motion of a body.
Rotational Motion (Fixed axis of Rotation)
In any kind of motion of a body, there is either change in position or change in orientation or change in both. If a body changes its orientation during its motion, it is said to have rotational motion.
In pure rotational motion, every particle of the rigid body moves in circles of different radii about a fixed line, which is known as axis of rotation. e.g. In case of motion of a ceiling fan, the vertical rod supporting the fan (here, axis of rotation) remains stationary and all the particles on the fan move in circular paths. The centres of circular paths are on the axis of rotation.
Also, it is not necessary that axis of rotation passes through the body. The axis of rotation doesn’t have to pass through the body; it can be inside, outside, or even through a particle, defining pure rotation, where every point moves in a circle around that line, with the axis simply being the fixed line of motion, like a spinning top or a door hinge. This allows for both spinning (axis through COM) and orbiting (axis outside) motions, with external forces determining the axis location for a freely moving body, while a fixed pivot forces the axis to coincide with the pivot point.
For example, A spinning coin: Axis goes through the center (COM).
A planet orbiting a star: Axis of orbit is outside the planet.
A door opening: Axis is the hinge pin, outside the main door panel.
To describe rotational motion, you need angular displacement ( \(\Delta \theta\) ), angular velocity ( \(\omega\) ), angular acceleration ( \(\alpha\) ), time ( \(t\) ), and moment of inertia ( \(I\) ) for dynamics, with corresponding kinematic equations showing how these variables change, similar to linear motion (e.g., \(\omega_f=\omega_i+\alpha t\) ). Key quantities relate linearly to rotational ones (e.g., tangential speed \(v=r \omega\), torque \(\tau=I \alpha\) )
Physical quantities required to describe rotational motion and equations of rotational motion
All the physical quantities required to describe rotational motion are same as in circular motion. Similarly, equations of rotational motion are same as that of circular motion.
Angular displacement, velocity and acceleration :
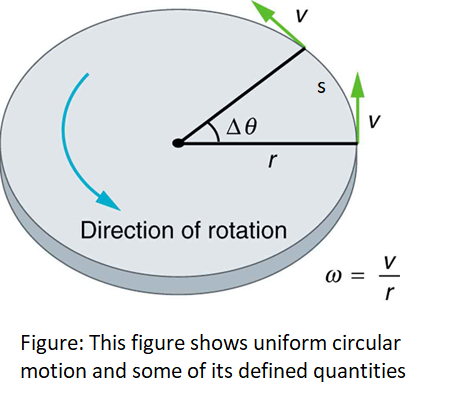
Angular velocity \(\omega\) was defined as the time rate of change of angular displacement, angle \(\theta\) :
\(
\omega=\frac{\Delta \theta}{\Delta t}
\)
where \(\theta\) is the angle of rotation as seen in Figure above. The relationship between angular velocity \(\omega\) and linear velocity \(v\) was also defined in Rotation Angle and Angular Velocity as
\(
v=r \omega
\)
or \(\omega=\frac{v}{r}\)
where \(r\) is the radius of curvature, also seen in Figure above. According to the sign convention, the counter clockwise direction is considered as positive direction and clockwise direction as negative.
Angular acceleration \(\alpha\) is defined as the rate of change of angular velocity. In equation form, angular acceleration is expressed as follows:
\(
\alpha=\frac{\Delta \omega}{\Delta t},
\)
where \(\Delta \omega\) is the change in angular velocity and \(\Delta t\) is the change in time.
Equations of Rotational Motion (Kinematics)
These equations are used for constant angular acceleration ( \(\alpha\) ), analogous to linear motion.
Velocity-Time: \(\omega_f=\omega_i+\alpha t\)
Displacement-Time: \(\Delta \theta=\omega_i t+\frac{1}{2} \alpha t^2\)
Velocity-Displacement: \(\omega_f^2=\omega_i^2+2 \alpha \Delta \theta\)
Displacement-Average Velocity: \(\Delta \theta=\frac{1}{2}\left(\omega_i+\omega_f\right) t\) (\(\text { Average angular velocty }=\bar{\omega}=\frac{\Delta \theta}{t}=\frac{\omega_i+\omega_f}{2}\))
Relating Linear and Rotational Motion
Arc Length (\(s\)): \(s=r {\Delta} {\theta}\) (linear distance traveled for a given angular displacement).
Tangential Speed ( \(v\) ): \(v=r \omega\) (linear speed at radius \(r\) ).
Tangential Acceleration \(\left(a_t\right)\): \(a_t=r \alpha\) (linear acceleration at radius \(r\) due to a change in angular speed).
Dynamics (Torque)
Newton’s Second Law for Rotation: \(\tau=I \alpha\) (Torque \(=\) Moment of Inertia × Angular Acceleration).
Moment of inertia
Moment of inertia ( \(I\) ) is the rotational equivalent of mass, quantifying an object’s resistance to changes in its rotational motion, depending on its total mass and how that mass is spread out from the axis of rotation, meaning mass farther from the axis increases \(I\). It links torque ( \(\tau\) ) to angular acceleration ( \(\alpha\) ) (like \(\tau=I \alpha\) ) just as mass links force ( \(F\) ) to linear acceleration ( \(a\) ) (Newton’s second law, \(F=m a)\).
Derivation: What is the analogue of mass in rotational motion?
Let us consider rotation about a fixed axis only. Let us try to get an expression for the kinetic energy of a rotating body. We know that for a body rotating about a fixed axis, each particle of the body moves in a circle with linear velocity. Thus for a particle at a perpendicular distance \(r_i\) from the fixed axis, the linear velocity at a given instant \(v_i\) is given by \(v_i=\omega r_i\). The kinetic energy of motion of this particle is
\(
k_i=\frac{1}{2} m_i v_i^2=\frac{1}{2} m_i r_i^2 \omega^2 \quad (\text { We know } v_i=r_i \omega)
\)
where \(m_i\) is the mass of the particle. The total kinetic energy \(K\) of the body is then given by the sum of the kinetic energies of individual particles,
\(
K=\sum_{i=1}^n k_i=\frac{1}{2} \sum_{i=1}^n\left(m_i r_i^2 \omega^2\right)
\)
Here \(n\) is the number of particles in the body. Note \(\omega\) is the same for all particles. Hence, taking \(\omega\) out of the sum,
\(
K=\frac{1}{2} \omega^2\left(\sum_{i=1}^n m_i r_i^2\right)
\)
We define a new parameter characterising the rigid body, called the moment of inertia \(I\), given by
\(
I=\sum_{i=1}^n m_i r_i^2
\)
With this definition,
\(
K=\frac{1}{2} I \omega^2 \dots(i)
\)
Compare Eq. (i) for the kinetic energy of a rotating body with the expression for the kinetic energy of a body in linear (translational) motion,
\(
K=\frac{1}{2} m v^2
\)
Here, \(m\) is the mass of the body and \(v\) is its velocity. We have already noted the analogy between angular velocity \(\omega\) (in respect of rotational motion about a fixed axis) and linear velocity \(v\) (in respect of linear motion). It is then evident that the parameter, moment of inertia \(I\), is the desired rotational analogue of mass in linear motion. In rotation (about a fixed axis), the moment of inertia plays a similar role as mass does in linear motion.
Calculation of Moment of Inertia
We have defined the moment of inertia of a system about a given line as
\(
I=\sum_i m_i r_i^2
\)
where \(m_i\) is the mass of the \(i\) th particle and \(r_i\) is its perpendicular distance from the given line. If the system is considered to be a collection of discrete particles, this definition may directly be used to calculate the moment of inertia.
The SI unit of moment of inertia is \(\mathrm{kg}-\mathrm{m}^2\). Its dimensions are \(\left[\mathrm{ML}^2\right]\).
Remark
- The moment of inertia of a single particle about an axis is given by \(I=m r^2\)
- Moment of inertia of a system of particles
The moment of inertia of a system of particles about an axis is given by \(I=\sum_i m_i r_i^2\)
where, \(r_i\) is the perpendicular distance from the axis of the \(i\)th particle of mass \(m_i\).
Example 1: A ring of diameter 0.4 m and of mass 10 kg is rotating about its geometrical axis at the rate of 35 rotations/second. Find the moment of inertia.
Solution: Consider a thin ring of radius \(R\) and mass \(M\), rotating in its own plane around its centre with angular velocity \(\omega\). Each mass element of the ring is at a distance \(R\) from the axis, and moves with a speed \(R \omega\). The kinetic energy is therefore,
\(
K=\frac{1}{2} M v^2=\frac{1}{2} M R^2 \omega^2
\)
Comparing with Eq. (\(K=\frac{1}{2} I \omega^2\)) we get \(I=M R^2\) for the ring.
\(
\begin{gathered}
I=(10 \mathrm{~kg})(0.2 \mathrm{~m})^2 \\
I=(10 \mathrm{~kg})\left(0.04 \mathrm{~m}^2\right) \\
I=0.4 \mathrm{~kg} \cdot \mathrm{~m}^2
\end{gathered}
\)
Example 2: Three particles, each of mass \(m\), are situated at the vertices of an equilateral triangle \(A B C\) of side \(L\) (figure below). Find the moment of inertia of the system about the line \(A X\) perpendicular to \(A B\) in the plane of \(A B C\).
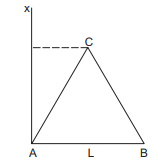
Solution: Perpendicular distance of \(A\) from \(A X=0\)
Perpendicular distance of \(B\) from \(A X=L\)
Perpendicular distance of \(C\) from \(A X=L/2\)
Thus, the moment of inertia of the particle at \(A=0\), of the particle at \(B=m L^2\), and of the particle at \(C=m(L / 2)^2\). The moment of inertia of the three-particle system about \(A X\) is
\(
0+m L^2+m(L / 2)^2=\frac{5 m L^2}{4}
\)
Note that the particles on the axis do not contribute to the moment of inertia.
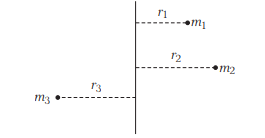
Example 3: Calculate the moment of inertia w.r.t. rotational axis \(X X^{\prime}\) in following figures.
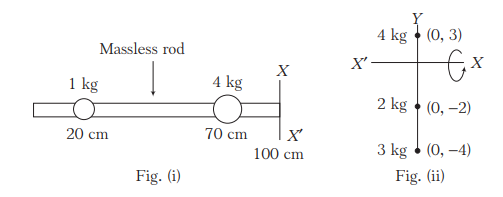
Solution: (i) Moment of inertia about axis \(X X^{\prime}\),
\(
\begin{aligned}
& I_{X X^{\prime}}=m_1 r_1^2+m_2 r_2^2=4 \times(1-0.7)^2+1 \times(1-0.2)^2 \\
& I_{X X^{\prime}}=4 \times(0.3)^2+1 \times(0.8)^2=1 \mathrm{~kg}-\mathrm{m}^2
\end{aligned}
\)
(ii) Moment of inertia about axis \(X X^{\prime}\),
\(
I_{X X^{\prime}}=4 \times(3)^2+2 \times(2)^2+3 \times(4)^2=92 \mathrm{~kg}-\mathrm{m}^2
\)
Example 4: A wheel of moment of inertia \(I\) and radius \(r\) is free to rotate about its centre as shown in figure below. A string is wrapped over its rim and a block of mass \(m\) is attached to the free end of the string. The system is released from rest. Find the speed of the block as it descends through a height \(h\).
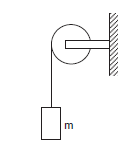
Solution: Let the speed of the block be \(v\) when it descends through a height \(h\). So is the speed of the string and hence of a particle at the rim of the wheel.
The angular velocity of the wheel is \(v / r\) and its kinetic energy at this instant is \(\frac{1}{2} I(v / r)^2\).
Using the principle of conservation of energy, the gravitational potential energy lost by the block must be equal to the kinetic energy gained by the block and the wheel. Thus,
\(
\begin{aligned}
& m g h=\frac{1}{2} m v^2+\frac{1}{2} I \frac{v^2}{r^2} \\
& \text { or, } \quad v=\left[\frac{2 m g h}{m+I / r^2}\right]^{1 / 2} \text { } \\
&
\end{aligned}
\)
Moment of Inertia of Continuous Mass Distributions
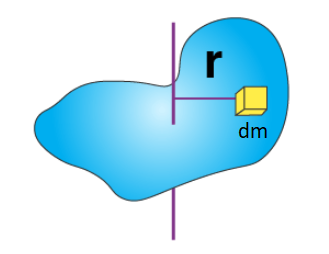
If the body is assumed to be continuous, one can use the technique of integration to obtain its moment of inertia about a given line. Consider a small element of the body. The element should be so chosen that the perpendiculars from different points of the element to the given line differ only by infinitesimal amounts. Let its mass be \(d m\) and its perpendicular distance from the given line be \(r\). Evaluate the product \(r^2 d m\) and integrate it over the appropriate limits to cover the whole body. Thus,
\(
I=\int r^2 d m
\)
under proper limits.
We can call \(r^2 d m\) the moment of inertia of the small element. Moment of inertia of the body about the given line is the sum of the moments of inertia of its constituent elements about the same line.
Case-I: Uniform rod about a perpendicular bisector
Consider a uniform rod of mass \(M\) and length \(l\) (figure below) and suppose the moment of inertia is to be calculated about the bisector \(A B\). Take the origin at the middle point \(O\) of the rod. Consider the element of the rod between a distance \(x\) and \(x+d x\) from the origin. As the rod is uniform,
Mass per unit length of the \(\operatorname{rod}=M / l\)
so that the mass of the element \(=(M / l) d x\)
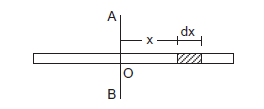
The perpendicular distance of the element from the line \(A B\) is \(x\). The moment of inertia of this element about \(A B\) is
\(
d I=\frac{M}{l} d x x^2
\)
When \(x=-l / 2\), the element is at the left end of the rod. As \(x\) is changed from \(-l / 2\) to \(l / 2\), the elements cover the whole rod.
Thus, the moment of inertia of the entire rod about \(A B\) is
\(
I=\int_{-l / 2}^{l / 2} \frac{M}{l} x^2 d x=\left[\frac{M}{l} \frac{x^3}{3}\right]_{-l / 2}^{l / 2}=\frac{M l^2}{12}
\)
Case-II: Moment of inertia of a rectangular plate about a line parallel to an edge and passing through the centre
The situation is shown in the figure below. Draw a line parallel to \(A B\) at a distance \(x\) from it and another at a distance \(x+d x\). We can take the strip enclosed between the two lines as the small element.
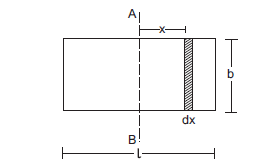
It is “small” because the perpendiculars from different points of the strip to \(A B\) differ by not more than \(d x\). As the plate is uniform, its mass per unit area \(=\frac{M}{b l}\). Mass of the strip \(=\frac{M}{b l} b d x=\frac{M}{l} d x\).
The perpendicular distance of the strip from \(A B=x\). The moment of inertia of the strip about \(A B=d I=\frac{M}{l} d x x^2\). The moment of inertia of the given plate is, therefore,
\(
I=\int_{-l / 2}^{l / 2} \frac{M}{l} x^2 d x=\frac{M l^2}{12} .
\)
The moment of inertia of the plate about the line parallel to the other edge and passing through the centre may be obtained from the above formula by replacing \(l\) by \(b\) and thus,
\(
I=\frac{M b^2}{12}
\)
Case-III: Moment of inertia of a circular ring about its axis (the line perpendicular to the plane of the ring through its centre)
Suppose the radius of the ring is \(R\) and its mass is \(M\). As all the elements of the ring are at the same perpendicular distance \(R\) from the axis, the moment of inertia of the ring is
\(
I=\int r^2 d m=\int R^2 d m=R^2 \int d m=M R^2
\)
Case-IV: Moment of inertia of a uniform circular plate about its axis
Let the mass of the plate be \(M\) and its radius \(R\) (figure below). The centre is at \(O\) and the axis \(O X\) is perpendicular to the plane of the plate.
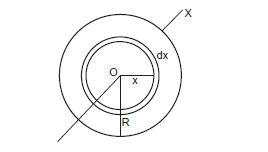
Draw two concentric circles of radii \(x\) and \(x+d x\), both centred at \(O\) and consider the area of the plate in between the two circles.
This part of the plate may be considered to be a circular ring of radius \(x\). As the periphery of the ring is \(2 \pi x\) and its width is \(d x\), the area of this elementary ring is \(2 \pi x d x\). The area of the plate is \(\pi R^2\). As the plate is uniform,
\(
\begin{aligned}
& \text { its mass per unit area }=\frac{M}{\pi R^2} . \\
& \text { Mass of the ring } \quad=\frac{M}{\pi R^2} 2 \pi x d x=\frac{2 M x d x}{R^2}
\end{aligned}
\)
Using the result obtained above for a circular ring, the moment of inertia of the elementary ring about \(O X\) is
\(
d I=\left[\frac{2 M x d x}{R^2}\right] x^2
\)
The moment of inertia of the plate about \(O X\) is
\(
I=\int_0^R \frac{2 M}{R^2} x^3 d x=\frac{M R^2}{2}
\)
Case-V: Moment of inertia of a hollow cylinder about its axis
Suppose the radius of the cylinder is \(R\) and its mass is \(M\). As every element of this cylinder is at the same perpendicular distance \(R\) from the axis, the moment of inertia of the hollow cylinder about its axis is
\(
I=\int R^2 d m=R^2 \int d m=M R^2
\)
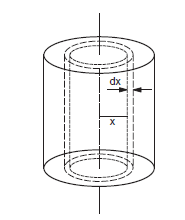
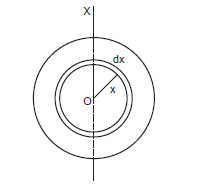
Case-VI: Moment of inertia of a uniform solid cylinder about its axis
Let the mass of the cylinder be \(M\) and its radius \(R\). Draw two cylindrical surfaces of radii \(x\) and \(x+d x\) coaxial with the given cylinder. Consider the part of the cylinder in between the two surfaces (figure below ). This part of the cylinder may be considered to be a hollow cylinder of radius \(x\). The area of cross-section of the wall of this hollow cylinder is \(2 \pi x d x\). If the length of the cylinder is \(l\), the volume of the material of this elementary hollow cylinder is \(2 \pi x d x l\).
The volume of the solid cylinder is \(\pi R^2 l\) and it is uniform, hence its mass per unit volume is
\(
\rho=\frac{M}{\pi R^2 l} \text { }
\)
The mass of the hollow cylinder considered is
\(
\frac{M}{\pi R^2 l} 2 \pi x d x l=\frac{2 M}{R^2} x d x
\)
As its radius is \(x\), its moment of inertia about the given axis is
\(
d I=\left[\frac{2 M}{R^2} x d x\right] x^2
\)
The moment of inertia of the solid cylinder is, therefore,
\(
I=\int_0^R \frac{2 M}{R^2} x^3 d x=\frac{M R^2}{2}
\)
Note that the formula does not depend on the length of the cylinder.
Case-VII: Moment of inertia of a uniform hollow sphere about a diameter
Let \(M\) and \(R\) be the mass and the radius of the sphere, \(O\) it’s centre and \(O X\) the given axis (figure below). The mass is spread over the surface of the sphere and the inside is hollow.
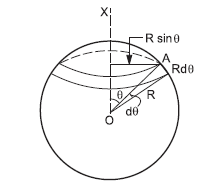
Let us consider a radius \(O A\) of the sphere at an angle \(\theta\) with the axis \(O X\) and rotate this radius about \(O X\). The point \(A\) traces a circle on the sphere. Now change \(\theta\) to \(\theta+d \theta\) and get another circle of somewhat larger radius on the sphere. The part of the sphere between these two circles, shown in the figure, forms a ring of radius \(R \sin \theta\). The width of this ring is \(R d \theta\) and its periphery is \(2 \pi R \sin \theta\). Hence,
the area of the ring \(=(2 \pi R \sin \theta)(R d \theta)\)
Mass per unit area of the sphere \(=\frac{M}{4 \pi R^2}\)
The mass of the ring
\(
=\frac{M}{4 \pi R^2}(2 \pi R \sin \theta)(R d \theta)=\frac{M}{2} \sin \theta d \theta
\)
The moment of inertia of this elemental ring about \(O X\) is
\(
\begin{aligned}
d I & =\left(\frac{M}{2} \sin \theta d \theta\right)(R \sin \theta)^2 \\
& =\frac{M}{2} R^2 \sin ^3 \theta d \theta
\end{aligned}
\)
As \(\theta\) increases from 0 to \(\pi\), the elemental rings cover the whole spherical surface. The moment of inertia of the hollow sphere is, therefore,
\(
\begin{aligned}
I & =\int_0^\pi \frac{M}{2} R^2 \sin ^3 \theta d \theta=\frac{M R^2}{2}\left[\int_0^\pi\left(1-\cos ^2 \theta\right) \sin \theta d \theta\right] \\
& =\frac{M R^2}{2}\left[\int_{\theta=0}^\pi-\left(1-\cos ^2 \theta\right) d(\cos \theta)\right] \\
& =\frac{-M R^2}{2}\left[\cos \theta-\frac{\cos ^3 \theta}{3}\right]_0^\pi=\frac{2}{3} M R^2
\end{aligned}
\)
Alternate method
Consider any particle \(P\) of the surface, having coordinates \(\left(x_i, y_i, z_i\right)\) with respect to the centre \(O\) as the origin (figure below) and \(O X\) as the \(X\)-axis. Let \(P Q\) be perpendicular to \(O X\). Then \(O Q=x_i\). That is the definition of \(x\)-coordinate.
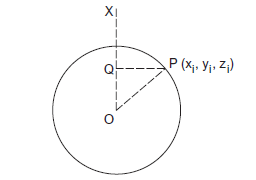
Thus, \(P Q^2=O P^2-O Q^2\)
\(
=\left(x_i^2+y_i^2+z_i^2\right)-x_i^2=y_i^2+z_i^2
\)
The moment of inertia of the particle \(P\) about the \(X\)-axis
\(
=m_i\left(y_i^2+z_i^2\right) \text {. }
\)
The moment of inertia of the hollow sphere about the \(X\)-axis is, therefore,
\(
I_x=\sum_i m_i\left(y_i^2+z_i^2\right)
\)
Similarly, the moment of inertia of the hollow sphere about the \(Y\)-axis is
\(
I_y=\sum_i m_i\left(z_i^2+x_i^2\right)
\)
and about the \(Z\)-axis it is
\(
I_z=\sum_i m_i\left(x_i^2+y_i^2\right)
\)
Adding these three equations we get
\(
\begin{aligned}
I_x+I_y+I_z & =\sum_i 2 m_i\left(x_i^2+y_i^2+z_i^2\right) \\
& =\sum_i 2 m_i R^2=2 M R^2 .
\end{aligned}
\)
As the mass is uniformly distributed over the entire surface of the sphere, all diameters are equivalent. Hence \(I_x, I_y\) and \(I_z\) must be equal.
\(
\text { Thus, } \quad I=\frac{I_x+I_y+I_z}{3}=\frac{2}{3} M R^2 \text { }
\)
Case-VIII: Moment of inertia of a uniform solid sphere about a diameter
Let \(M\) and \(R\) be the mass and radius of the given solid sphere. Let \(O\) be the centre and \(O X\) the given axis. Draw two spheres of radii \(x\) and \(x+d x\) concentric with the given solid sphere. The thin spherical shell trapped between these spheres may be treated as a hollow sphere of radius \(x\).
The mass per unit volume of the solid sphere
\(
=\frac{M}{\frac{4}{3} \pi R^3}=\frac{3 M}{4 \pi R^3} \text {. }
\)
The thin hollow sphere considered above has a surface area \(4 \pi x^2\) and thickness \(d x\). Its volume is \(4 \pi x^2 d x\) and hence its mass is
\(
\begin{aligned}
& =\left(\frac{3 M}{4 \pi R^3}\right)\left(4 \pi x^2 d x\right) \\
& =\frac{3 M}{R^3} x^2 d x .
\end{aligned}
\)
Its moment of inertia about the diameter \(O X\) is, therefore,
\(
d I=\frac{2}{3}\left[\frac{3 M}{R^3} x^2 d x\right] x^2=\frac{2 M}{R^3} x^4 d x .
\)
If \(x=0\), the shell is formed at the centre of the solid sphere. As \(x\) increases from 0 to \(R\), the shells cover the whole solid sphere.
The moment of inertia of the solid sphere about \(O X\) is, therefore,
\(
I=\int_0^R \frac{2 M}{R^3} x^4 d x=\frac{2}{5} M R^2
\)
Case-IX: Moment of Inertia of a thin ring
Consider a thin ring of radius \(R\) and mass \(M\), rotating in its own plane around its centre with angular velocity \(\omega\). Each mass element of the ring is at a distance \(\mathrm{R}\) from the axis, and moves with a speed \(R \omega\). The kinetic energy is therefore,
\(
K=\frac{1}{2} M v^2=\frac{1}{2} M R^2 \omega^2
\)
Comparing with Eq. (7.35) we get \(I=M R^2\) for the ring.
Case-X: A light rod rotating about an axis
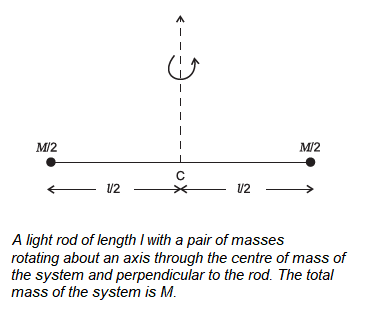
Next, take a rigid rod of negligible mass of length of length \(l\) with a pair of small masses, rotating about an axis through the centre of mass perpendicular to the rod. Each mass \(M / 2\) is at a distance \(l / 2\) from the axis. The moment of inertia of the masses is therefore given by
\(
(M / 2)(l / 2)^2+(M / 2)(l / 2)^2
\)
Thus, for the pair of masses, rotating about the axis through the centre of mass perpendicular to the rod
\(
I=M l^2 / 4
\)
Radius of Gyration
Radius of Gyration is defined as the radial distance between the axis of rotation to the point where whole mass of a body is assumed to be concentrated. In simple words, it is the distribution of the components of the object.
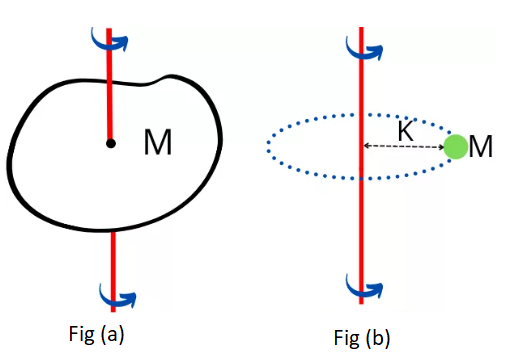
Fig (a) shows the object of mass \(M\) rotating about the vertical axis and fig (b) shows the mass of a whole body is concentrated at a distance of \(K\) from the axis of rotation. As per the definition of the radius of gyration, the moment of inertia of the body shown in fig (a) is equal to the moment of inertia of concentrated point mass (shown in fig (b)) about the same axis.
\(
I=M K^2 \Rightarrow K=\sqrt{I / M}
\)
Radius of gyration is also defined as the root-mean-square-value of distances of all the particles about the axis of rotation.
i.e. \(K=\sqrt{\frac{r_1^2+r_2^2+r_3^2+\ldots+r_n^2}{n}}\)
It depends on the shape and size of the body, position and configuration of the axis of rotation, distribution of mass of the body with respect to the axis of rotation.
Radius of gyration does not depend on the mass of body.
Example 5: A wheel of mass 8 kg has moment of inertia equals to \(0.5 \mathrm{~kg}-\mathrm{m}^2\). Determine its radius of gyration.
Solution: Given, mass, \(M=8 \mathrm{~kg}\)
Moment of inertia, \(I=0.5 \mathrm{~kg}-\mathrm{m}^2\)
\(
\begin{array}{ll}
\because & I=M K^2 \\
\Rightarrow & K^2=\frac{I}{M} \\
\Rightarrow & K=\sqrt{\frac{I}{M}}
\end{array}
\)
Radius of gyration, \(K=\sqrt{\frac{0.5}{8}}\)
\(
\begin{array}{ll}
\Rightarrow & K=0.25 \mathrm{~m} \\
\text { or } & K=25 \mathrm{~cm}
\end{array}
\)
Example 6: The moment of inertia of a solid cylinder about its axis of rotation is \(\frac{M R^2}{2}\). What is the value of the radius of gyration of the cylinder about this axis?
Solution: The general formula relating the moment of inertia ( \(I\) ) to the radius of gyration ( \(K\) ) is \(\boldsymbol{I}=\boldsymbol{M}^{\mathbf{2}}\), where \(\boldsymbol{M}\) is the mass. The problem states that the moment of inertia for a solid cylinder about its axis is \(I=\frac{M^2}{2}\). We equate these two expressions:
\(
M K^2=\frac{M R^2}{2}
\)
\(
K=\sqrt{\frac{R^2}{2}}=\frac{R}{\sqrt{2}}
\)
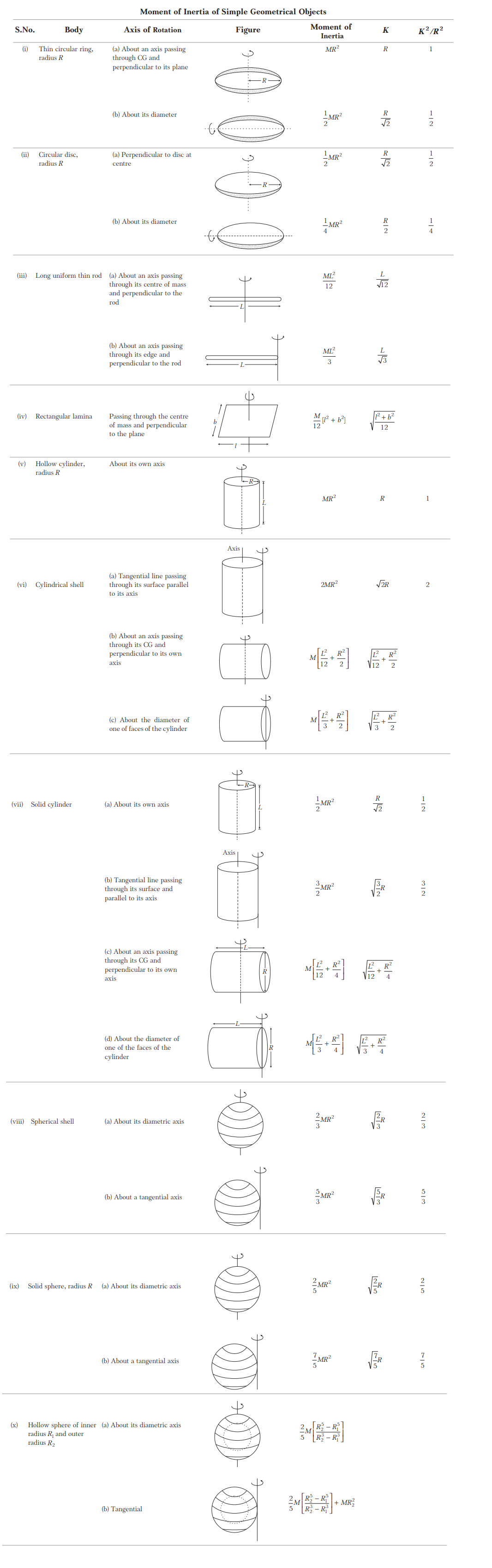
Moment of Inertia of Simple Geometrical Objects