13. 4 Velocity and acceleration in simple harmonic motion
Equations of SHM
Consider a block attached to a spring on a frictionless table (Figure below). The equilibrium position (the position where the spring is neither stretched nor compressed) is marked as \(x=0\). At the equilibrium position, the net force is zero.

Work is done on the block to pull it out to a position of \(x=+A\), and it is then released from rest. The maximum \(x\) position \((A)\) is called the amplitude of the motion. The block begins to oscillate in SHM between \(x=+A\) and \(x=-A\), where \(A\) is the amplitude of the motion and \(T\) is the period of the oscillation.
Velocity in SHM
In Simple Harmonic Motion (SHM), velocity and acceleration are not constant; they change continuously depending on the object’s position. The easiest way to understand them is by looking at how they relate to the displacement \(x\).
Assuming the displacement is given by:
\(
x(t)=A \cos (\omega t+\phi)
\)
Velocity \((v)\) is the rate of change of displacement. Mathematically, it is the first derivative of \(x(t)\) with respect to time:
\(
v(t)=\frac{d x}{d t}=-A \omega \sin (\omega t+\phi)
\)
Key Characteristics:
At Equilibrium (\(x=0\)): Velocity is at its maximum. The object is moving fastest as it passes through the center.
\(
v_{\max }= \pm \omega \boldsymbol{A}
\)
At Extreme Positions (\(x= \pm A\)): Velocity is zero. The object momentarily stops before changing direction.
Because the sine function oscillates between -1 and +1, the maximum velocity is the amplitude times the angular frequency, \(v_{\max }=A \omega\). The maximum velocity occurs at the equilibrium position \((x=0)\) when the mass is moving toward \(x=+A\). The maximum velocity in the negative direction is attained at the equilibrium position \((x=0)\) when the mass is moving toward \(x=-A\) and is equal to \(-v_{\max }\). The negative sign shows that \(v({t})\) has a direction opposite to the positive direction of \(x\)-axis.
General Formula for Velocity in SHM
We start with the standard equations for displacement and velocity in SHM:
Displacement: \(x=A \cos (\omega t) \rightarrow \cos (\omega t)=\frac{x}{A}\)
Velocity: \(v=-A \omega \sin (\omega t) \rightarrow \sin (\omega t)=-\frac{v}{A \omega}\)
We use the fundamental trig identity:
\(
\sin ^2 \theta+\cos ^2 \theta=1
\)
Substitute our SHM terms into the identity:
\(
\left(-\frac{v}{A \omega}\right)^2+\left(\frac{x}{A}\right)^2=1
\)
Now, solve for \(v\) :
\(
\frac{v^2}{A^2 \omega^2}=1-\frac{x^2}{A^2}
\)
Multiply the entire equation by \(A^2 \omega^2\) :
\(
\begin{gathered}
v^2=\omega^2 A^2\left(1-\frac{x^2}{A^2}\right) \\
v^2=\omega^2\left(A^2-x^2\right)
\end{gathered}
\)
Taking the square root gives us the final relation:
\(
v= \pm \omega \sqrt{A^2-x^2}
\)
Special Cases:
(i) When the particle is at the mean position, i.e. \(x=0\), then its velocity is maximum.
\(
\therefore \quad v_{\max }=\pm \omega A
\)
(ii) When the particle is at the extreme position, i.e. \(x= \pm A\), then its velocity is zero.
\(
\therefore \quad v=\omega \sqrt{A^2-A^2}=0
\)
Therefore, the velocity of a particle executing SHM is zero at either of its extreme positions.
Acceleration in SHM
Acceleration (a) is the rate of change of velocity. It is the second derivative of displacement:
\(
a(t)=\frac{d v}{d t}=-A \omega^2 \cos (\omega t+\phi)
\)
Key Characteristics:
The Defining Relation: Since \(x=A \cos (\omega t+\phi)\), we can simplify the acceleration formula to:
\(
a=-\omega^2 x
\)
This shows that acceleration is always proportional to displacement but acts in the opposite direction (always pointing toward the center).
At Equilibrium (\(x=0\)): Acceleration is zero. There is no restoring force at the center.
At Extreme Positions \((x= \pm A)\) : Acceleration is at its maximum. The restoring force is strongest here.
\(a_{\max }= \pm \omega^2 A\)
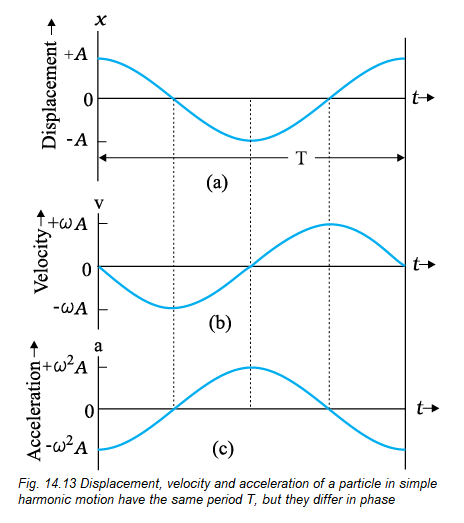
The corresponding plots are shown in Fig. 14.13. All quantities vary sinusoidally with time; only their maxima differ and the different plots differ in phase. \(x\) varies between \(-A\) to \(A ; v(t)\) varies from \(-\omega A\) to \(\omega A\) and \(a(t)\) from \(-\omega^2 A\) to \(\omega^2 A\). With respect to the displacement plot, velocity plot has a phase difference of \(\pi / 2\) and the acceleration plot has a phase difference of \(\pi\).
Important points regarding the kinematics of SHM
- In linear SHM, the length of SHM path is 2 A.
- The total work done and displacement in one complete oscillation is zero (Work done is force times displacement. In SHM, the net displacement over one cycle is zero. Therefore, the total work done is zero), but the total traversed length is 4 A (Distance is the total path length traveled. In one complete oscillation, the object travels from the equilibrium position to one extreme ( \(A\) ), back to the equilibrium, to the opposite extreme ( \(A\) ), and back to the equilibrium. Therefore, the total distance traveled is \(A+A+A+A=4 A\)).
- The velocity and acceleration varies with the same frequency as displacement.
- Velocity is ahead of displacement by phase angle of \((\pi / 2)\) rad, acceleration is ahead of velocity by phase angle of ( \(\pi / 2\) ) rad and acceleration is ahead of displacement by phase angle of \(\pi \mathrm{~rad}\).
Example 1: The amplitude of a harmonic oscillator is A. When the particle’s velocity of this oscillator is half of the maximum velocity, then determine the position of the particle.
Solution: As, \(v=\omega \sqrt{A^2-x^2}\) but it is given that \(v=\frac{v_{\max }}{2}=\frac{A \omega}{2}\)
\(
\begin{aligned}
& \frac{A \omega}{2}=\omega \sqrt{A^2-x^2} \Rightarrow A^2=4\left(A^2-x^2\right) \\
& x^2=\frac{4 A^2-A^2}{4} \Rightarrow x= \pm \frac{\sqrt{3} A}{2}
\end{aligned}
\)
Example 2: A body oscillates with SHM according to the equation, \(x=(5 \mathrm{~m}) \cos \left[\left(2 \pi \mathrm{~rad} \mathrm{s}^{-1}\right) t+\pi / 4\right]\). At \(t=1.5 \mathrm{~s}\), calculate the (i) displacement, (ii) speed and (iii) acceleration of the body.
Solution: The angular frequency \(\omega\) of the body \(=2 \pi \mathrm{~rad} \mathrm{s}^{-1}\) and its time period, \(\quad T=1 \mathrm{~s}\)
At \(t=1.5 \mathrm{~s}\),
(i)
\(
\begin{aligned}
\text { Displacement } & =(5 \mathrm{~m}) \cos \left[\left(2 \pi \mathrm{rad} \mathrm{~s}^{-1}\right) \times 1.5 \mathrm{~s}+\pi / 4\right] \\
& =(5 \mathrm{~m}) \cos [(3 \pi+\pi / 4) \mathrm{~rad}] \\
& =-5 \times 0.707 \mathrm{~m}=-3.535 \mathrm{~m}
\end{aligned}
\)
(ii) Using \(v=-\omega A \sin (\omega t+\phi)\)
Speed of the body
\(
=-(5 \mathrm{~m})\left(2 \pi \mathrm{~s}^{-1}\right) \sin \left[\left(2 \pi \mathrm{~rad} \mathrm{~s}^{-1}\right) \times 1.5 \mathrm{~s}+\frac{\pi}{4}\right]
\)
\(
\begin{aligned}
& =-(5 \mathrm{~m})\left(2 \pi \mathrm{~s}^{-1}\right) \sin \left[\left(3 \pi+\frac{\pi}{4}\right)\right] \\
& =10 \pi \times 0.707 \mathrm{~ms}^{-1}=222 \mathrm{~ms}^{-1}
\end{aligned}
\)
(iii) Acceleration of the body
\(
\begin{aligned}
& =-\left(2 \pi \mathrm{rads}^{-1}\right)^2 \times \text { Displacement } \\
& =-\left(2 \pi \mathrm{rads}^{-1}\right)^2 \times(-3.535 \mathrm{~m})=139.41 \mathrm{~ms}^{-2}
\end{aligned}
\)