13.7 The Simple Pendulum
The Definition of Torque
Torque \((\tau)\) is defined as the cross product of the position vector \((\mathbf{r})\) and the force vector \((\mathbf{F})\) :
\(
\boldsymbol{\tau}=\mathbf{r} \times \mathbf{F}
\)
In terms of magnitude, this is:
\(
\tau=r F \sin (\phi)
\)
where \(\phi\) is the angle between the position vector and the force vector. Alternatively, it is often simpler to think of it as:
\(
\tau=\text { Force × Perpendicular distance from the pivot }
\)
The Simple Pendulum
Consider simple pendulum, a small bob of mass \(m\) tied to an inextensible massless string of length \(L\). The other end of the string is fixed to a rigid support. The bob oscillates in a plane about the vertical line through the support. Fig. 14.18(a) shows this system. Fig. 14.18(b) is a kind of ‘free-body’ diagram of the simple pendulum showing the forces acting on the bob.
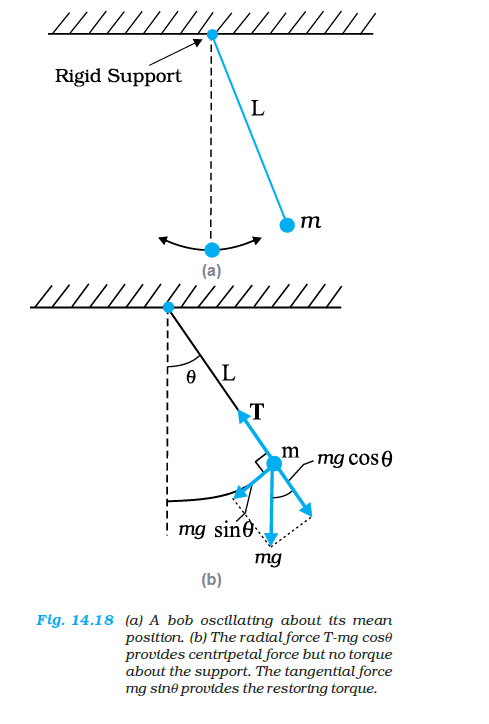
Let \(\theta\) be the angle made by the string with the vertical. When the bob is at the mean position, \(\theta=0\)
There are only two forces acting on the bob; the tension T along the string and the vertical force due to gravity \((=m g)\). The force \(m g\) can be resolved into the component \(m g \cos \theta\) along the string and \(m g \sin \theta\) perpendicular to it. Since the motion of the bob is along a circle of length \(L\) and centre at the support point, the bob has a radial acceleration \(\left(\omega^2 L\right)\) and also a tangential acceleration; the latter arises since motion along the arc of the circle is not uniform. The radial acceleration is provided by the net radial force \(\mathrm{T}-m g \cos \theta\), while the tangential acceleration is provided by \(m g \sin \theta\). It is more convenient to work with torque about the support since the radial force gives zero torque. Torque \(\tau\) about the support is entirely provided by the tangential component of force
\(
\tau=-L(m g \sin \theta) \dots(i)
\)
This is the restoring torque that tends to reduce angular displacement, hence the negative sign. By Newton’s law of rotational motion,
\(
\tau=I \alpha \dots(ii)
\)
where \(I\) is the moment of inertia of the system about the support and \(\alpha\) is the angular acceleration. Thus,
\(
I \alpha=-m g \sin \theta \quad L \dots(iii)
\)
Or, \(\alpha=-\frac{m g L}{I} \sin \theta \dots(iv)\)
We can simplify Eq. (iv) if we assume that the displacement \(\theta\) is small. We know that \(\sin \theta\) can be expressed as,
\(
\sin \theta=\theta-\frac{\theta^3}{3!}+\frac{\theta^5}{5!} \pm \ldots(v)
\)
where \(\theta\) is in radians.
Now if \(\theta\) is small, \(\sin \theta\) can be approximated by \(\theta\) and Eq. (iv) can then be written as,
\(
\alpha=-\frac{m g L}{I} \theta \dots(vi)
\)
In Table below, we have listed the angle \(\theta\) in degrees, its equivalent in radians, and the value of the function \(\sin \theta\). From this table it can be seen that for \(\theta\) as large as 20 degrees, \(\sin \theta\) is nearly the same as \(\theta\) expressed in radians.
\(
\begin{array}{|c|c|c|}
\hline \theta \text { (degrees) } & \theta \text { (radians) } & \sin \theta \\
\hline 0 & 0 & 0 \\
\hline 5 & 0.087 & 0.087 \\
\hline 10 & 0.174 & 0.174 \\
\hline 15 & 0.262 & 0.259 \\
\hline 20 & 0.349 & 0.342 \\
\hline
\end{array}
\)
Equation (vi) is mathematically, identical to Eq. \(a=-\omega^2 x\)) except that the variable is angular displacement. Hence we have proved that for small \(\theta\), the motion of the bob is simple harmonic. From Eqs. (vi) and \(a=-\omega^2 x\)),
\(
\omega=\sqrt{\frac{m g L}{I}}
\)
and \(T=2 \pi \sqrt{\frac{I}{m g L}} \dots(vii)\)
Now since the string of the simple pendulum is massless, the moment of inertia \(I\) is simply \(\mathrm{mL}^2\). Eq. (vii) then gives the well-known formula for time period of a simple pendulum.
\(
T=2 \pi \sqrt{\frac{L}{g}} \dots(viii)
\)
Note that the time period is independent of the mass of the pendulum. This formula is valid only when radius of point mass of pendulum is negligible as compared to length of the pendulum.
Explanation:
Why only \(m g \sin \theta\) contributes:
Let’s look at the three forces/components acting on the bob relative to the support point:
Tension (\(T\)): This force points directly toward the pivot. The distance between the force line and the pivot is zero. Therefore, it creates zero torque.
Radial Gravity \((m g \cos \theta)\) : This component points directly away from the pivot. Like tension, its line of action passes through the support point, so it also creates zero torque.
Tangential Gravity ( \(m g \sin \theta\)): This component acts at a \(90^{\circ}\) angle to the string (the position vector \(L\)).
Since \(m g \sin \theta\) is already perpendicular to the lever \(\operatorname{arm} L\), the magnitude of the torque is simply:
\(
\tau=L \cdot(m g \sin \theta)
\)
The Negative Sign:
The negative sign in the equation \(\tau=-L(m g \sin \theta)\) is a restoring sign.
If you displace the bob in a positive direction (say, to the right, increasing \(\theta\)), the tangential force \(m g \sin \theta\) acts to the left (decreasing \(\theta\)).
Because the torque acts in the opposite direction of the displacement, we add the negative sign to show it is trying to bring the pendulum back to the equilibrium position (the center).
Effect of acceleration
- Above or below the surface of earth, \(g\) decreases. Hence, time period of simple pendulum increases.
- At the centre of earth or in a satellite or in a freely falling lift, the value of \(g\) is zero, so time period of simple pendulum becomes infinity. That means, it will not oscillate and remain as it is, where it is left.
- If a simple pendulum is suspended at the ceiling of a lift which is accelerating upwards with acceleration \(a\), then time period of simple pendulum, \(T^{\prime}=2 \pi \sqrt{\frac{l}{g+a}}\), hence time period will decrease.
- If a simple pendulum is suspended at the ceiling of a lift which is accelerating downwards with acceleration \(a\), then time period of simple pendulum, \(T^{\prime}=2 \pi \sqrt{\frac{l}{g-a}}\). i.e. Time period will increase.
- If a simple pendulum in a car which is accelerating horizontally with acceleration ‘ \(a\) ‘, then time period of pendulum will be \(T^{\prime}=2 \pi \sqrt{\frac{l}{g_{\text {eff }}}}\) where \(g_{\text {eff }}=\sqrt{g^2+a^2}\), i.e. time period will decrease. In this case, the equilibrium position will not be vertical but will make an angle \(\theta=\tan ^{-1}(a / g)\) to the vertical in a direction opposite to the acceleration.

Example 1: Two pendulums whose lengths differ by 22 cm oscillate at the same place, so that one of them makes 30 oscillations and the other 36 oscillations during same time. Find the lengths of the pendulum.
Solution: According to the question,
Equate the total time:
The total time taken for a certain number of oscillations is given by \(t=n \times T\), where \(n\) is the number of oscillations and \(T\) is the period \(2 \pi \sqrt{\frac{l}{g}}\). Since both pendulums cover their respective oscillations in the same time interval:
\(
30 \times 2 \pi \sqrt{\frac{l_1}{g}}=36 \times 2 \pi \sqrt{\frac{l_2}{g}}
\)
Determine the ratio of lengths:
By canceling the common terms (\(2 \pi\) and \(\sqrt{g}\)) and squaring both sides, we find the ratio of the lengths:
\(
\begin{gathered}
30 \sqrt{l_1}=36 \sqrt{l_2} \Longrightarrow \frac{\sqrt{l_1}}{\sqrt{l_2}}=\frac{36}{30}=\frac{6}{5} \\
\frac{l_1}{l_2}=\left(\frac{6}{5}\right)^2=\frac{36}{25}
\end{gathered}
\)
Solve for individual lengths:
We are given that the difference in lengths is 22 cm. Since \(l_1\) has a larger ratio value, \(l_1 -l_2=22\). We can rewrite the ratio as \(l_1=\frac{36}{25} l_2\) and substitute it into the difference equation:
\(
\begin{gathered}
\frac{36}{25} l_2-l_2=22 \Longrightarrow \frac{11}{25} l_2=22 \\
l_2=\frac{22 \times 25}{11}=50 \mathrm{~cm}
\end{gathered}
\)
Using \(l_1=l_2+22\) :
\(
l_1=50+22=72 \mathrm{~cm}
\)
Example 2: The length of a simple pendulum is 16 cm. It is suspended by the roof of a lift which is moving upwards with an acceleration of \(6.2 \mathrm{~ms}^{-2}\). Find the time period of the pendulum.
Solution: Given, the length of the pendulum, \(l=16 \mathrm{~cm}=0.16 \mathrm{~m}\) Acceleration of the lift, \(a=6.2 \mathrm{~ms}^{-2}\). When a lift accelerates upward, an inertial (pseudo) force acts downward on the pendulum bob. This increases the effective acceleration due to gravity (\(g_{\text {eff }}\)) experienced by the pendulum: \(g_{\mathrm{eff}}=g+a\).
\(
\begin{aligned}
\because \text { Time period, } T & =2 \pi \sqrt{\frac{l}{(g+a)}}=2 \times 3.14 \sqrt{\frac{0.16}{(9.8+6.2)}} \\
& =6.28 \times \sqrt{\frac{0.16}{16}}=6.28 \times \sqrt{\frac{1}{100}}=\frac{6.28}{10} \\
& =0.628 \mathrm{~s}
\end{aligned}
\)
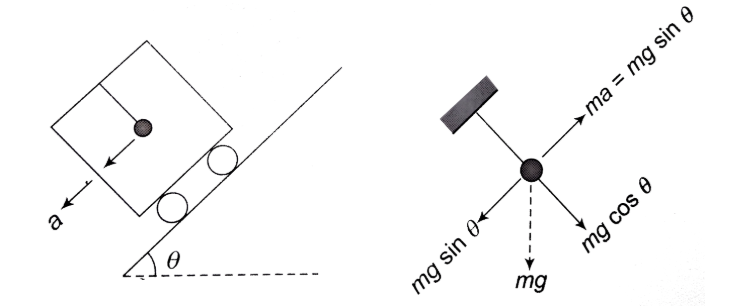
Example 3: A simple pendulum of length \(l\) is suspended from the ceiling of a cart which is sliding without friction on an inclined plane of inclination \(\theta\). What will be the time period of the pendulum?
Solution: Here, point of suspension has an acceleration, \(a=g \sin \theta\) (down the plane). Further, \(g\) can be resolved into two components \(g \sin \theta\) (along the plane) and \(g \cos \theta\) (perpendicular to plane).

\(\therefore \quad g_{\text {eff }}=g \cos \theta \quad\) (perpendicular to plane)
\(
T=2 \pi \sqrt{\frac{l}{\left|g_{\mathrm{eff}}\right|}}=2 \pi \sqrt{\frac{l}{g \cos \theta}}
\)
Explanation: To find the time period of a pendulum in an accelerating frame, we need to determine the effective acceleration (\(g_{\text {eff }}\)) acting on the pendulum bob relative to the cart.
Step 1: Analyzing the Motion of the Cart
Since the cart is sliding down a frictionless inclined plane of inclination \(\theta\), its acceleration (\(a\)) is directed down the slope:
\(
a=g \sin \theta
\)
Step 2: Finding Effective Gravity (\(g_{e f f}\))
In the frame of the cart, the pendulum bob experiences two accelerations:
Gravity (\(g\)): Acting vertically downward.
Pseudo-acceleration (\(-a\)): Acting up the slope (opposite to the cart’s acceleration).
Note: Think of pseudo-acceleration (and the resulting pseudo-force) as an “imaginary” effect you feel only because the “room” you are in is accelerating. It isn’t caused by a physical push or pull; it’s a result of inertia-your body’s desire to keep doing what it was already doing.
Breaking down the Pendulum:
The Real World: The cart is sliding down the hill at \(a=g \sin \theta\).
Inside the Cart: You feel like you are being “tossed” up the slope with an acceleration of \(-a\).
The Result: This “up-the-slope” pseudo-acceleration perfectly cancels out the “down-the-slope” part of gravity. This is why the pendulum doesn’t swing back and forth relative to the incline; it only “feels” the gravity pressing it against the floor of the cart.
Key Rule to Remember:
Pseudo-acceleration is always equal in magnitude and opposite in direction to the acceleration of the frame. > If the frame (the cart) goes → , the pseudo-force goes ⟵ .
We calculate \(g_{\text {eff }}\) by taking the vector sum of these two components. It is easiest to resolve the standard gravity vector \(g\) into components parallel and perpendicular to the inclined plane:
Component parallel to the incline: \(g \sin \theta\)
Component perpendicular to the incline: \(g \cos \theta\)
Now, let’s look at the net acceleration in the cart’s frame:
Parallel to incline: The component \(g \sin \theta\) is exactly canceled out by the pseudoacceleration \(a=g \sin \theta\) acting in the opposite direction.
\(
a_{\text {parallel }}=g \sin \theta-g \sin \theta=0
\)
Perpendicular to incline: The only remaining component is the one normal to the surface.
\(
a_{\text {perpendicular }}=g \cos \theta
\)
Therefore, the effective gravitational acceleration is:
\(
g_{e f f}=g \cos \theta
\)
Step 3: Calculating the Time Period
The standard formula for the time period of a simple pendulum is \(T=2 \pi \sqrt{\frac{l}{g}}\). Replacing \(g\) with our calculated \(g_{\text {eff }}\), we get:
\(
T=2 \pi \sqrt{\frac{l}{g \cos \theta}}
\)
Summary:
Because the cart is in “free fall” along the axis of the incline, the pendulum effectively “feels” as though gravity is only pulling it directly toward the floor of the cart (perpendicular to the slope).
Example 4: A bob of simple pendulum is suspended by a metallic wire. If \(\alpha\) is the coefficient of linear expansion and \(d \theta\) is the change in temperature, then prove that percentage change in time period is \(50 \alpha d \theta\).
Solution: With change in temperature \(d \theta\), the effective length of wire becomes \(l^{\prime}=l(1+\alpha d \theta)\)
\(
T^{\prime}=2 \pi \sqrt{\frac{l^{\prime}}{g}} \text { and } T=2 \pi \sqrt{\frac{l}{g}}
\)
Hence, \(\frac{T^{\prime}}{T}=\sqrt{\frac{l^{\prime}}{l}}=(1+\alpha d \theta)^{1 / 2}\)
\(
=1+\frac{1}{2} \alpha d \theta
\)
Percentage increase in time period
\(
\begin{aligned}
& =\left(\frac{T^{\prime}-T}{T}\right) \times 100=\left(\frac{T^{\prime}}{T}-1\right) \times 100 \\
& =\left(1+\frac{\alpha d \theta}{2}-1\right) \times 100 \\
& =50 \alpha d \theta
\end{aligned}
\)
Example 5: A simple pendulum consists of a small sphere of mass \(m\) suspended by a thread of length 1. The sphere carries a positive charge \(q\). The pendulum is placed in a uniform electric field of strength \(E\) directed vertically upwards. With what period will the pendulum oscillate, if the electrostatic force acting on the sphere is less than the gravitational force?
Solution:

Step 1: Identify the Forces
Gravitational Force (\(F_g\)): Acts vertically downward with a magnitude of \(m g\).
Electrostatic Force (\(F_e\)): Since the charge \(q\) is positive and the electric field \(E\) is directed upward, this force acts vertically upward with a magnitude of \(q E\).
Step 2: Calculate Effective Acceleration
The net downward force (\(F_{\text {net }}\)) on the bob is the difference between these two forces (since the problem states \(q E<m g\)):
\(
F_{\mathrm{net}}=m g-q E
\)
According to Newton’s Second Law (\(F=m a\)), the effective acceleration (\(g_{\text {eff }}\)) is the net force divided by the mass:
\(
\begin{gathered}
g_{\mathrm{eff}}=\frac{m g-q E}{m} \\
g_{\mathrm{eff}}=g-\frac{q E}{m}
\end{gathered}
\)
Step 3: Determine the Time Period
The standard formula for the period of a simple pendulum is \(T=2 \pi \sqrt{\frac{L}{g_{\mathrm{eff}}}}\). Substituting our value for \(g_{\text {eff }}\) and using \(l\) for length as per your prompt:
\(
T=2 \pi \sqrt{\frac{l}{g-\frac{q E}{m}}}
\)
Example 6: Find the period of the function, \(y=\sin \omega t+\sin 2 \omega t+\sin 3 \omega t\)
Solution: The given function can be written as,
Here,
\(
\begin{aligned}
& y=y_1+y_2+y_3 \\
& y_1=\sin \omega t, T_1=\frac{2 \pi}{\omega} \\
& y_2=\sin 2 \omega t, T_2=\frac{2 \pi}{2 \omega}=\frac{\pi}{\omega} \\
& y_3=\sin 3 \omega t, T_3=\frac{2 \pi}{3 \omega} \\
& T_1=2 T_2 \quad \text { and } T_1=3 T_3
\end{aligned}
\)
So, the time period of the given function is \(T_1\) or \(\frac{2 \pi}{\omega}\).
Because in time \(T=\frac{2 \pi}{\omega}\), first function completes one oscillation, the second function two oscillations and the third three.
Vector Method of Combining Two or More Simple Harmonic Motions
A simple harmonic motion is produced when a force (called restoring force) proportional to the displacement acts on a particle. If a particle is acted upon by two such forces the resultant motion of the particle is a combination of two simple harmonic motions. Suppose the two individual motions are represented by,
\(
\begin{aligned}
& x_1=A_1 \sin \omega t \\
& x_2=A_2 \sin (\omega t+\phi)
\end{aligned}
\)
Both the simple harmonic motions have the same angular frequency \(\omega\).

The resultant displacement of the particle is given by,
\(
\begin{aligned}
x & =x_1+x_2 \\
& =A_1 \sin \omega t+A_2 \sin (\omega t+\phi) \\
& =A \sin (\omega t+\alpha)
\end{aligned}
\)
Here, \(A=\sqrt{A_1^2+A_2^2+2 A_1 A_2 \cos \phi}\)
\(
\tan \alpha=\frac{A_2 \sin \phi}{A_1+A_2 \cos \phi}
\)
Example 7: Find the displacement equation of the simple harmonic motion obtained by combining the motions.
\(
x_1=2 \sin \omega t, \quad x_2=4 \sin \left(\omega t+\frac{\pi}{6}\right) \text { and } x_3=6 \sin \left(\omega t+\frac{\pi}{3}\right)
\)
Solution: The resultant equation is,

\(
\begin{aligned}
x & =A \sin (\omega t+\phi) \\
\Sigma A_x & =2+4 \cos 30^{\circ}+6 \cos 60^{\circ}=8.46 \\
\Sigma A_y & =4 \sin 30^{\circ}+6 \cos 30^{\circ}=7.2
\end{aligned}
\)
\(
\begin{aligned}
A & =\sqrt{\left(\Sigma A_x\right)^2+\left(\Sigma A_y\right)^2} \\
& =\sqrt{(8.46)^2+(7.2)^2} \\
& =11.25
\end{aligned}
\)
\(
\begin{aligned}
\tan \phi & =\frac{\Sigma A_y}{\Sigma A_x} \\
& =\frac{7.2}{8.46}=0.85 \\
\phi & =\tan ^{-1}(0.85) \\
& =40.4^{\circ}
\end{aligned}
\)
Thus, the displacement equation of the combined motion is,
\(
\begin{aligned}
& x=11.25 \sin (\omega t+\phi) \\
& \text { where, }\phi=40.4^{\circ}
\end{aligned}
\)
Composition of Two Simple Harmonic Motions in Perpendicular Directions
Suppose two forces act on a particle, the first alone would produce a simple harmonic motion in \(x\)-direction given by
\(
x=A_1 \sin \omega t \dots(i)
\)
and the second would produce a simple harmonic motion in \(y\)-direction given by
\(
y=A_2 \sin (\omega t+\delta) \dots(ii)
\)
The amplitudes \(A_1\) and \(A_2\) may be different and their phases differ by \(\delta\). The frequencies of the two simple harmonic motions are assumed to be equal. The resultant motion of the particle is a combination of the two simple harmonic motions. The position of the particle at time \(t\) is \((x, y)\) where \(x\) is given by equation (i) and \(y\) is given by (ii). The motion is thus twodimensional and the path of the particle is in general an ellipse. The equation of the path may be obtained by eliminating \(t\) from (i) and (ii).
By (i),
\(
\sin \omega t=\frac{x}{A_1} .
\)
Thus, \(\quad \cos \omega t=\sqrt{1-\frac{x^2}{A_1{ }^2}}\).
Putting in (ii)
\(
y=A_2[\sin \omega t \cos \delta+\cos \omega t \sin \delta]
\)
\(
\begin{gathered}
=A_2\left[\frac{x}{A_1} \cos \delta+\sqrt{1-\frac{x}{A_1^2}} \sin \delta\right] \\
\left(\frac{y}{A_2}-\frac{x}{A_1} \cos \delta\right)^2=\left(1-\frac{x^2}{A_1^2}\right) \sin ^2 \delta \\
\frac{y^2}{A_2^2}-\frac{2 x y}{A_1 A_2} \cos \delta+\frac{x^2}{A_1^2} \cos ^2 \delta \\
=\sin ^2 \delta-\frac{x^2}{A_1^2} \sin ^2 \delta \\
\frac{x^2}{A_1^2}+\frac{y^2}{A_2^2}-\frac{2 x y \cos \delta}{A_1 A_2}=\sin ^2 \delta \dots(iii)
\end{gathered}
\)
This is an equation of an ellipse and hence the particle moves in ellipse. Equation (i) shows that \(x\) remains between \(-A_1\) and \(+A_1\) and (ii) shows that \(y\) remains between \(A_2\) and \(-A_2\). Thus, the particle always remains inside the rectangle defined by
\(
x= \pm A_1, y= \pm A_2 .
\)
The ellipse given by (iii) is traced inside this rectangle and touches it on all the four sides (figure below).
Special Cases:
Case-I: \(\delta=0\)
The two simple harmonic motions are in phase. When the \(x\)-coordinate of the particle crosses the value 0, the \(y\)-coordinate also crosses the value 0. When \(x\)-coordinate reaches its maximum value \(A_1\), the \(y\)-coordinate also reaches its maximum value \(A_2\). Similarly, when \(x\)-coordinate reaches its minimum value \(-A_1\), the \(y\)-coordinate reaches its minimum value \(-A_2\).
If we substitute \(\delta=0\) in equation (iii) we get
\(
\begin{aligned}
\frac{x^2}{A_1^2}+\frac{y^2}{A_2^2}-\frac{2 x y}{A_1 A_2} & =0 \\
\left(\frac{x}{A_1}-\frac{y}{A_2}\right)^2 & =0
\end{aligned}
\)
\(
y=\frac{A_2}{A_1} x \dots(iv)
\)
which is the equation of a straight line passing through the origin and having a slope \(\tan ^{-1} \frac{A_2}{A_1}\). Figure below shows the path. Equation (iii) represents the diagonal \(A C\) of the rectangle. The particle moves on this diagonal.
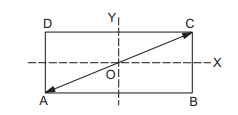
Equation (iv) can be directly obtained by dividing (i) by (ii) and putting \(\delta=0\). The displacement of the particle on this straight line at time \(t\) is
\(
\begin{aligned}
r=\sqrt{x^2+y^2} & =\sqrt{\left(A_1 \sin \omega t\right)^2+\left(A_2 \sin \omega t\right)^2} \\
& =\sqrt{\left(A_1^2+A_2^2\right)} \sin \omega t
\end{aligned}
\)
Thus, the resultant motion is a simple harmonic motion with same frequency and phase as the component motions. The amplitude of the resultant simple harmonic motion is \(\sqrt{A_1^2+A_2^2}\) as is also clear from the above figure.
Case-II: \(\boldsymbol{\delta}=\boldsymbol{\pi}\)
The two simple harmonic motions are out of phase in this case. When the \(x\)-coordinate of the particle reaches its maximum value \(A_1\), the \(y\)-coordinate reaches its minimum value \(-A_2\). Similarly, when the \(x\)-coordinate reaches its minimum value \(-A_1\), the \(y\)-coordinate takes its maximum value \(A_2\).
Putting \(\delta=\pi\) in equation (iii) we get
\(
\frac{x^2}{A_1^2}+\frac{y^2}{A_2^2}+\frac{2 x y}{A_1 A_2}=0
\)
\(
\left(\frac{x}{A_1}+\frac{y}{A_2}\right)^2=0
\)
\(
y=-\frac{A_2}{A_1} \cdot x
\) which is the equation of the line \(B D\) in figure below.
Thus the particle oscillates on the diagonal \(B D\) of the rectangle as shown in figure above.
The displacement on this line at time \(t\) may be obtained from equation (i) and (ii) (with \(\delta=\pi\)).
\(
\begin{aligned}
r & =\sqrt{x^2+y^2}=\sqrt{\left[A_1 \sin \omega t\right]^2+\left[A_2 \sin (\omega t+\pi)\right]^2} \\
& =\sqrt{A_1^2 \sin ^2 \omega t+A_2^2 \sin ^2 \omega t}=\sqrt{A_1^2+A_2^2} \sin \omega t
\end{aligned}
\)
Thus the resultant motion is a simple harmonic motion with amplitude \(\sqrt{A_1^2+A_2^2}\).
Case-III: \(\delta=\pi / 2\)
The two simple harmonic motions differ in phase by \(\pi / 2\). Equations (i) and (ii) may be written as
\(
\begin{aligned}
& x=A_1 \sin \omega t \\
& y=A_2 \sin (\omega t+\pi / 2)=A_2 \cos \omega t
\end{aligned}
\)
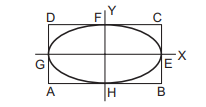
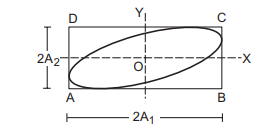
The \(x\)-coordinate takes its maximum value \(x=A_1\) when \(\sin \omega t=1\). Then \(\cos \omega t=0\) and hence, the \(y\)-coordinate is zero. The particle is at the point \(E\) in figure above. When \(x\)-coordinate reduces to 0, \(\sin \omega t=0\), and \(\cos \omega t\) becomes 1. Then \(y\)-coordinate takes its maximum value \(A_2\) so that the particle reaches the point \(F\). Then \(x\) reduces to \(-A_1\) and \(y\) becomes 0. This corresponds to the point \(G\) of figure above. As \(x\) increases to 0 again, \(y\) takes its minimum value \(-A_2\), the particle is at the point \(H\). The motion of the particle is along an ellipse \(E F G H E\) inscribed in the rectangle shown. The major and the minor axes of the ellipse are along the \(X\) and \(Y\)-axes.
Putting \(\delta=\pi / 2\) in equation (iii) we get
\(
\frac{x^2}{A_1^2}+\frac{y^2}{A_2^2}=1
\)
which is the standard equation of an ellipse with its axes along \(X\) and \(Y\)-axes and with its centre at the origin. The length of the major and minor axes are \(2 A_1\) and \(2 A_2\).
If \(A_1=A_2=A\) together with \(\delta=\pi / 2\), the rectangle of figure above becomes a square and the ellipse becomes a circle. Equation (iii) becomes
\(
x^2+y^2=A^2
\)
which represents a circle.
Thus, the combination of two simple harmonic motions of equal amplitude in perpendicular directions differing in phase by \(\pi / 2\) is a circular motion. The circular motion may be clockwise or anticlockwise, depending on which component leads the other.
Spring block system
Let us consider a massless spring placed on a frictionless horizontal surface. Its one end is attached to a rigid support and the other end to a body of mass \(m\). When it is pulled on one side through a small distance \(x\) and released, it moves to and fro about a mean position. Let \(x=0\) be the position of the centre of the body when the spring is at the mean position.

The movement of the mass is defined by the relationship between its acceleration (\(a\)) and its displacement (\(x\)).
Step 1: The Definition of SHM
In physics, any motion where the acceleration is directly proportional to the displacement and directed toward the mean position is called Simple Harmonic Motion. The standard mathematical form for this is:
\(
a=-\omega^2 x
\)
Here, \(\omega\) (omega) is the angular frequency of the oscillation.
Step 2: Comparing the Equations
By Hooke’s law, a restoring force \(F\) is developed in the spring on stretching and compressing it through a small displacement \(x\),
\(
\Rightarrow \quad \begin{aligned}
F & =-k x \\
a & =-\frac{k}{m} x
\end{aligned}
\)
You already established that for a spring-mass system:
\(
a=-\frac{k}{m} x
\)
By comparing this to the standard SHM equation \(\left(a=-\omega^2 x\right)\), we can see that:
\(
\omega^2=\frac{k}{m} \quad \Rightarrow \quad \omega=\sqrt{\frac{k}{m}}
\)
Step 3: Connecting Angular Frequency to Time
The angular frequency \(\omega\) represents how many radians the oscillation “covers” per second. One full cycle (one period \(T\) ) corresponds to \(2 \pi\) radians. Therefore, the relationship between the time period and angular frequency is:
\(
\omega=\frac{2 \pi}{T}
\)
Step 4: The Final Derivation
Now, we simply set the two expressions for \(\omega\) equal to each other:
\(
\frac{2 \pi}{T}=\sqrt{\frac{k}{m}}
\)
To solve for \(T\), we take the reciprocal of both sides:
\(
\frac{T}{2 \pi}=\sqrt{\frac{m}{k}}
\)
Multiplying by \(2 \pi\) gives us the final formula:
\(
T=2 \pi \sqrt{\frac{m}{k}}
\)
where, \(k\) is force constant of spring and \(m\) is mass of the object connected to the spring.
Why doesn’t \(x\) appear in the final formula?
One of the most interesting things about SHM is that the Time Period is independent of the amplitude. Whether you pull the spring back 1 cm or 5 cm , it will take the exact same amount of time to complete one oscillation. This is because pulling it further increases the displacement (\(x\)), but it also increases the restoring force (\(F\)) and thus the acceleration (\(a\)) proportionally.
Note: If the stretch in a vertically loaded spring is \(y\), then for equilibrium of mass \(m, \quad T=2 \pi \sqrt{y / g}\)
Special cases:
- If the spring has a mass \(M\) and a mass \(m\) is suspended from it, then time period is given by
\(
T=2 \pi \sqrt{\frac{M_{\mathrm{eff}}}{k}}, \text { where } M_{\mathrm{eff}}=m+\frac{M}{3}
\) - If two masses \(m_1\) and \(m_2\) are connected by a spring of spring constant \(k\) and made to oscillate on horizontal surface. Then, time period is given by
\(
T=2 \pi \sqrt{\frac{\mu}{k}}
\)

Here, \(\mu=\) reduced mass \(=\frac{m_1 m_2}{m_1+m_2}\)
Explanation: Step 1: Spring with Mass \(M\left(M_{\text {eff }}=m+\frac{M}{3}\right)\)
In the basic formula, we assume the spring is “massless.” In reality, the spring has mass \(M\), and its parts move at different speeds:
The end attached to the wall has a velocity of zero.
The end attached to the mass \(m\) has a velocity of \(v\).
The middle of the spring moves at a velocity somewhere in between.
To find the time period, we look at the Total Kinetic Energy (\(K_{\text {total }}\)) of the system. By integrating the kinetic energy of every tiny segment of the spring from the wall to the mass, we find:
\(
K_{\text {spring }}=\frac{1}{6} M v^2
\)
When you add this to the kinetic energy of the suspended mass ( \(K_{\text {mass }}=\frac{1}{2} m v^2\) ), the total energy looks like this:
\(
K_{t o t a l}=\frac{1}{2} m v^2+\frac{1}{2}\left(\frac{M}{3}\right) v^2=\frac{1}{2}\left(m+\frac{M}{3}\right) v^2
\)
The term in the parentheses is your Effective Mass. Since the spring isn’t all moving at the same speed, only one-third of its mass effectively contributes to the inertia of the oscillation.
Step 2: Two Masses \(m_1\) and \(m_2\left(T=2 \pi \sqrt{\frac{\mu}{k}}\right)\)
When two masses are connected by a spring and left to oscillate, they both move relative to the Center of Mass of the system. Neither mass is “fixed.”
To simplify this, we use the concept of Reduced Mass \((\mu)\). We treat the system as if one mass is fixed and the other mass is replaced by a single “effective” mass \(\mu\) :
\(
\mu=\frac{m_1 m_2}{m_1+m_2}
\)
Why does this work?
- Newton’s Second Law: For mass \(1, F=m_1 a_1\). For mass \(2, F=m_2 a_2\) (where \(F\) is the spring force).
- Relative Acceleration: We care about how the distance between them changes, which is \(a_{r e l}=a_1-a_2\).
- Substituting the forces: \(a_{\text {rel }}=\frac{-F}{m_1}-\frac{F}{m_2}=-F\left(\frac{1}{m_1}+\frac{1}{m_2}\right)\).
- The term \(\left(\frac{1}{m_1}+\frac{1}{m_2}\right)\) is equal to \(\frac{1}{\mu}\).
This transforms the complex two-body problem into the simple \(a=-\frac{k}{\mu} x\) form we derived earlier.
Summary:
\(\begin{array}{|l|l|l|}
\hline \text { Scenario } & \text { Effective Mass }\left(M_{\text {eff }}\right) & \text { Logic } \\
\hline \begin{array}{l}
\text { Heavy } \\
\text { Spring }
\end{array} & m+\frac{M}{3} & \begin{array}{l}
\text { Only part of the spring’s mass is } \\
\text { moving at full speed. }
\end{array} \\
\hline \begin{array}{l}
\text { Two } \\
\text { Masses }
\end{array} & \frac{m_1 m_2}{m_1+m_2} & \begin{array}{l}
\text { Both masses share the force; } \mu \text { is } \\
\text { always smaller than the lightest } \\
\text { mass. }
\end{array} \\
\hline
\end{array}
\)
Example 8: A 2.5 kg collar is attached to a spring of spring constant \(250 \mathrm{Nm}^{-1}\). It slides without friction over a horizontal surface. It is displaced from its equilibrium position by 20 cm and released. Calculate the period of oscillation and the maximum speed.
Solution: The period of oscillation,
\(
\begin{aligned}
T & =2 \pi \sqrt{\frac{m}{k}}=2 \pi \sqrt{\frac{2.5}{250}} \\
& =\frac{2 \times 3.14}{10}=0.63 \mathrm{~s}
\end{aligned}
\)
Maximum speed, \(v_m=A \omega=0.2 \sqrt{\frac{k}{m}}=0.2 \times \sqrt{\frac{250}{2.5}}\)
\(
=0.2 \times 10=2 \mathrm{~ms}^{-1}
\)
Example 9: A spring-mass system is hanging from the ceiling of an elevator in equilibrium. The elevator suddenly starts accelerating upwards with acceleration a, find
(i) the frequency and
(ii) the amplitude of the resulting SHM.

Solution: To solve this, we need to compare the state of the spring before the acceleration starts to the new equilibrium position created by the upward acceleration.
Step 1: The Initial State (Equilibrium at Rest)
When the elevator is at rest, the spring is stretched by an amount \(x_0\) such that the spring force balances gravity:
\(
k x_0=m g \Longrightarrow x_0=\frac{m g}{k}
\)
This is the starting position of the mass relative to the natural length of the spring.
Step 2: The New State (Accelerating Upward)
Once the elevator accelerates upward with acceleration \(a\), an inertial (pseudo) force \(m a\) acts downward on the mass. The new “effective” weight is \(m(g+a)\).
The new equilibrium position (\(x_{e q}\)) where the forces balance is:
\(
k x_{e q}=m(g+a) \Longrightarrow x_{e q}=\frac{m(g+a)}{k}
\)
(i) The Frequency (\(f\))
The frequency of a spring-mass system depends only on the mass (\(m\)) and the spring constant (\(k\)). It is independent of gravity or any constant external acceleration.
The angular frequency is \(\omega=\sqrt{\frac{k}{m}}\).
Therefore, the frequency is:
\(
f=\frac{1}{2 \pi} \sqrt{\frac{k}{m}}
\)
(ii) The Amplitude (\(A\))
The amplitude is the distance between the position of the mass when the acceleration started and the new equilibrium position.
At the moment the acceleration begins, the mass is still at the old equilibrium position (\(x_0\)). It suddenly finds itself away from the new equilibrium (\(x_{e q}\)). The distance between these two points is the amplitude:
\(
\begin{gathered}
A=\left|x_{e q}-x_0\right| \\
A=\frac{m(g+a)}{k}-\frac{m g}{k} \\
A=\frac{m a}{k}
\end{gathered}
\)
Summary:
Frequency: Remains unchanged \(\left(f=\frac{1}{2 \pi} \sqrt{\frac{k}{m}}\right)\).
Amplitude: The mass will oscillate with an amplitude of \(\frac{m a}{k}\) around the new, lower equilibrium point.
Example 10: A body of mass \(m\) attached to a spring which is oscillating with time period 4 s. If the mass of the body is increased by 4 kg, its time period increases by 2 s. Determine the value of initial mass \(m\).
Solution: \(\text { In } 1 \text { st case, } T=2 \pi \sqrt{\frac{m}{k}} \Rightarrow 4=2 \pi \sqrt{\frac{m}{k}} \dots(i)\)
\(
\text { In 2nd case, } 6=2 \pi \sqrt{\frac{m+4}{k}} \dots(ii)
\)
On dividing Eq. (i) by Eq. (ii), we get
\(
\frac{4}{6}=\sqrt{\frac{m}{m+4}} \Rightarrow \frac{16}{36}=\frac{m}{m+4} \Rightarrow m=3.2 \mathrm{~kg}
\)
Example 11: A block with a mass of 3 kg is suspended from an ideal spring having negligible mass and stretches the spring upto 0.2 m .
(i) What is the force constant of the spring?
(ii) What is the period of oscillation of the block, if it is pulled down and released?
Solution: (i) To solve this, we first use the static equilibrium condition to find the spring constant and then apply the formula for the period of a mass-spring system.
(i) Force Constant of the Spring (\(k\))
When the 3 kg mass is hung, it stretches the spring by \(x=0.2 \mathrm{~m}\) and comes to rest. At this point, the upward spring force (\(F_s=k x\)) exactly balances the downward force of gravity (\(F_g=m g\)).
Using \(g \approx 9.8 \mathrm{~m} / \mathrm{s}^2\) :
\(
\begin{gathered}
k x=m g \\
k(0.2)=3 \times 9.8 \\
k=\frac{29.4}{0.2} \\
k=147 \mathrm{~N} / \mathrm{m}
\end{gathered}
\)
(Note: If your textbook uses \(g=10 \mathrm{~m} / \mathrm{s}^2\), the result would be \(150 \mathrm{~N} / \mathrm{m}\).)
(ii) Period of Oscillation (\(T\))
The period of a mass-spring system depends only on the mass (\(m\)) and the force constant (\(k\)). It is independent of how far the block was pulled down (the amplitude).
The formula is:
\(
T=2 \pi \sqrt{\frac{m}{k}}
\)
Substituting our values (\(m=3 \mathrm{~kg}\) and \(k=147 \mathrm{~N} / \mathrm{m}\)):
\(
T=2 \pi \sqrt{\frac{3}{147}}
\)
\(
T=\frac{2 \pi}{7} \approx 0.897 \mathrm{~s}
\)
Example 12: Two rigid bodies \(A\) and \(B\) of masses 1 kg and 2 kg respectively are rigidly connected to a spring of force constant \(400 \mathrm{Nm}^{-1}\). The body \(B\) rests on a horizontal table. From the rest position, the body \(A\) is compressed by 2 cm and then released. Deduce (i) the frequency of oscillation, (ii) total oscillation energy, (iii) the amplitude of the harmonic vibration of the reaction of the table on body \(B\).

Solution: To solve this, we first need to recognize that while body \(A\) oscillates, body \(B\) remains stationary on the table (since it is resting and we are looking for the reaction force). This means only mass \(A\) is effectively part of the oscillating system.
(i) Frequency of Oscillation (\(f\))
The frequency of a spring-mass system depends on the oscillating mass (\(m_A\)) and the spring constant (\(k\)). Even though \(B\) is attached, it isn’t moving, so the system behaves like a single mass \(A\) on a fixed spring.
Given: \(m_A=1 \mathrm{~kg}, k=400 \mathrm{~N} / \mathrm{m}\)
The formula for frequency is:
\(
\begin{aligned}
f & =\frac{1}{2 \pi} \sqrt{\frac{k}{m_A}} \\
f & =\frac{1}{2 \pi} \sqrt{\frac{400}{1}} \\
f=\frac{20}{2 \pi} & =\frac{10}{\pi} \approx 3.18 \mathrm{~Hz}
\end{aligned}
\)
(ii) Total Oscillation Energy (\(E\))
The total energy in SHM is determined by the maximum displacement (amplitude) from the equilibrium position. You compressed the spring by \(2 \mathrm{~cm}(0.02 \mathrm{~m})\) from its rest position and released it, so \(A=0.02 \mathrm{~m}\).
The energy formula is:
\(
\begin{gathered}
E=\frac{1}{2} k A^2 \\
E=\frac{1}{2}(400)(0.02)^2 \\
E=200 \times 0.0004 \\
E=0.08 \mathrm{~J}
\end{gathered}
\)
(iii) Amplitude of the Harmonic Vibration of the Reaction
The reaction force \(R\) of the table on body \(B\) must balance the weight of \(B\) plus the force exerted by the spring.
When the spring is compressed, it pushes down on body \(B\) (increasing the reaction). When the spring is extended (beyond its equilibrium point), it pulls up on body \(B\) (decreasing the reaction).
Step 1: Mean Reaction \(\left(R_{\text {mean }}\right)\) :
As you correctly calculated, this is the total weight of the system at rest:
\(
R_{\text {mean }}=\left(m_A+m_B\right) g=3 \times 9.8=29.4 \mathrm{~N}
\)
Step 2: Force Amplitude (\(F_{\text {amp }}\)):
The oscillating force from the spring is:
\(
F=k A=400 \times 0.02=8 \mathrm{~N}
\)
Step 3: Range of Reaction:
The net reaction of the table (\(R\)) will vary harmonically around the mean:
Maximum Reaction: \(29.4 \mathrm{~N}+8 \mathrm{~N}=37.4 \mathrm{~N}\) (When the spring is at maximum compression).
Minimum Reaction: \(29.4 \mathrm{~N}-8 \mathrm{~N}=21.4 \mathrm{~N}\) (When the spring is at maximum extension).
Example 13: In the following arrangements, block is slightly displaced vertically downwards from its equilibrium position and released. Find time period of vertical oscillations. Assume the pulley to be light.

Solution: (i) Let at some instant extension of spring is \(x\), tension in the string \(T=k x\)

Restoring force, \(F=T=-k x \quad \text { (Hooke’s law) }\)
where, \(k=\) spring constant
Time period, \(T_0=2 \pi \sqrt{\frac{m}{k}}\)
(ii) Let block move down by \(x\), pulley will move by \(x / 2\). To “give” the block \(x\) meters of string, the pulley only needs to drop by \(x / 2\) meters, because dropping the pulley by \(x / 2\) releases \(x / 2\) from the left side and \(x / 2\) from the right side-totaling \(x\).

\(
2 T=\frac{k x}{2} \Rightarrow T=\frac{k x}{4}
\)
Comparing it with equation \(F=-k x\), we get
\(
k^{\prime}=k / 4 \quad \therefore \quad T_0=2 \pi \sqrt{\frac{m}{k^{\prime}}}
\)
\(
T_0=2 \pi \sqrt{\frac{m}{k / 4}}=4 \pi \sqrt{\frac{m}{k}}
\)
(iii) If block moves by \(x\), pulley also moves \(x\) and hence, spring is stretched by \(2 x\). If the block moves down by \(x\), the movable pulley also moves down by \(x\). To allow the pulley to move down by \(x\), the string needs \(x\) amount of length for the left side and \(x\) amount for the right side.
Total string length needed \(=x+x=2 x\).
Since the other end of the string is attached to the spring, the spring must stretch by \(2 x\) to provide that total length.

Tension produced in spring, \(T=4 k x\)
Restoring force, \(F=-4 k x\)
Comparing it with equation \(F=-k^{\prime} x\), we get
\(
k^{\prime}=+4 k
\)
\(
\therefore \quad T_0=2 \pi \sqrt{\frac{m}{k^{\prime}}} \Rightarrow T_0=2 \pi \sqrt{\frac{m}{4 k}}=\pi \sqrt{\frac{m}{k}}
\)
Oscillations of spring combination
Series combination:
Two springs of spring constants \(k_1\) and \(k_2\) are joined in series as shown in the figure.

Then, the resultant spring constant of the combination is given by
\(
\frac{1}{k_s}=\frac{1}{k_1}+\frac{1}{k_2}=\frac{k_1+k_2}{k_1 k_2} \Rightarrow k_s=\frac{k_1 k_2}{k_1+k_2}
\)
and hence,
\(
T=2 \pi \sqrt{\frac{m}{k_s}}=2 \pi \sqrt{\frac{\left(k_1+k_2\right) m}{k_1 k_2}}
\)
Proof: To prove the expression for the effective spring constant (\(k_s\)) of two springs in series, we must look at two fundamental rules that apply when springs are linked end-to-end.
Step 1: The Physics of the Setup
When two springs are in series and a force \(F\) (such as a hanging weight) is applied:
The Force is Constant: The same tension \(F\) acts through every point of the combination. Therefore, both springs experience the same force \(F\).
The Total Extension is Additive: The total displacement (\(x\)) of the mass is the sum of the individual extensions of each spring (\(x_1\) and \(x_2\)).
\(
x=x_1+x_2
\)
Step 2: The Derivation
According to Hooke’s Law, the force on a spring is \(F=k x\), which can be rewritten as \(x=\frac{F}{k}\).
For the individual springs:
Extension of spring 1: \(x_1=\frac{F}{k_1}\)
Extension of spring 2: \(x_2=\frac{F}{k_2}\)
For the entire system, if we replace both springs with a single “equivalent” spring with constant \(k_s\) :
Total extension: \(x=\frac{F}{k_s}\)
Now, substitute these into our addition equation \(\left(x=x_1+x_2\right)\) :
\(
\frac{F}{k_s}=\frac{F}{k_1}+\frac{F}{k_2}
\)
Divide both sides by \(F\) (since \(F \neq 0\)):
\(
\frac{1}{k_s}=\frac{1}{k_1}+\frac{1}{k_2}
\)
Step 3: The Final Formula
To find \(k_s\) directly, we find a common denominator and flip the fraction:
\(
\begin{aligned}
& \frac{1}{k_s}=\frac{k_2+k_1}{k_1 k_2} \\
& k_s=\frac{k_1 k_2}{k_1+k_2}
\end{aligned}
\)
and hence,
\(
T=2 \pi \sqrt{\frac{m}{k_s}}=2 \pi \sqrt{\frac{\left(k_1+k_2\right) m}{k_1 k_2}}
\)
Parallel combination
Two springs of spring constants \(k_1\) and \(k_2\) are joined in parallel as shown in the figure.

Then, spring constant, \(k_p=k_1+k_2\)
Time period, \(T=2 \pi \sqrt{\frac{m}{k_p}}=2 \pi \sqrt{\frac{m}{\left(k_1+k_2\right)}}\)
Proof: To prove the expression for the effective spring constant (\(k_p\)) of two springs in parallel, we look at how the force and displacement are shared when the springs are side-by-side.
Step 1: The Physics of the Setup
When two springs are arranged in parallel and a mass \(m\) is suspended from them:
The Displacement is Constant: Since both springs are attached to the same rigid bar or mass, if the mass moves down by a distance \(x\), both springs must stretch by that same distance \(x\).
\(
x_1=x_2=x
\)
The Total Force is Shared: The total downward force \(F\) (the weight of the mass) is supported by both springs together. Each spring contributes a portion of the restoring force (\(F_1\) and \(F_2\)).
\(
F=F_1+F_2
\)
Step 2: The Derivation
Using Hooke’s Law \((F=k x)\) :
Force exerted by spring 1: \(F_1=k_1 x\)
Force exerted by spring 2: \(F_2=k_2 x\)
If we replace the two springs with a single equivalent spring of constant \(k_p\), the total force for the same displacement \(x\) would be:
Total Force: \(F=k_p x\)
Now, substitute these into our force addition equation \(\left(F=F_1+F_2\right)\) :
\(
k_p x=k_1 x+k_2 x
\)
Since \(x\) is the same for all terms and \(x \neq 0\), we can divide the entire equation by \(x\) :
\(
k_p=k_1+k_2
\)
Time Period: Because the system is stiffer ( \(k_p\) is larger), a mass-spring system in parallel will oscillate faster (shorter period) than one in series.
\(
T_p=2 \pi \sqrt{\frac{m}{k_1+k_2}}
\)
Important points regarding spring block system
- If the length of the spring is made \(n\) times, then the effective force constant becomes \(1 / n\) times and the time period becomes \(\sqrt{n}\) times.
- If a spring of spring constant \(k\) is divided into \(n\) equal parts, the spring constant of each part becomes \(n k\), and time period becomes \(\frac{1}{\sqrt{n}}\) times.
- The force constant of a stiffer spring is more than that of a soft spring.
Example 14: One body is suspended from a spring of length \(l\), spring constant \(k\) and has time period T. Now, if the spring is divided in two equal parts which are joined in parallel and the same body is suspended from this arrangement, then determine the new time period.
Solution: To solve this, we need to understand how cutting a spring affects its stiffness (spring constant) and then how the parallel arrangement further modifies it.
Step 1: Effect of Cutting the Spring
The spring constant \(k\) of a spring is inversely proportional to its length \((L)\). Mathematically:
\(
k \propto \frac{1}{L} \Longrightarrow k L=\mathrm{constant}
\)
When the spring of length \(l\) is cut into two equal parts, each new piece has a length of \(l / 2\). Therefore, the spring constant for each part (\(k^{\prime}\)) becomes:
\(
\begin{gathered}
k^{\prime} \cdot \frac{l}{2}=k \cdot l \\
k^{\prime}=2 k
\end{gathered}
\)
Each half-spring is twice as stiff as the original full-length spring.
Step 2: Parallel Arrangement
Now, these two pieces (each with constant \(2 k\)) are joined in parallel. As we proved earlier, the effective spring constant (\(k_{\text {eff }}\)) for a parallel setup is the sum of the individual constants:
\(
\begin{gathered}
k_{e f f}=k^{\prime}+k^{\prime} \\
k_{e f f}=2 k+2 k=4 k
\end{gathered}
\)
Step 3: Calculating the New Time Period
The original time period \(T\) is given by:
\(
T=2 \pi \sqrt{\frac{m}{k}}
\)
The new time period \(T^{\prime}\) with the parallel arrangement \(\left(k_{\text {eff }}=4 k\right)\) is:
\(
\begin{gathered}
T^{\prime}=2 \pi \sqrt{\frac{m}{4 k}} \\
T^{\prime}=\frac{1}{\sqrt{4}}\left(2 \pi \sqrt{\frac{m}{k}}\right) \\
T^{\prime}=\frac{T}{2}
\end{gathered}
\)
Summary: By cutting the spring and placing the pieces in parallel, you have created a system that is 4 times stiffer than the original. Consequently, the body oscillates twice as fast, resulting in a time period that is half of the original.
Example 15: Periodic time of oscillation \(T_1\) is obtained when a mass is suspended from a spring and if another spring is used with same mass, then the periodic time of oscillation is \(T_2\). Now, if this mass is suspended from series combination of above springs, then calculate the time period.
Solution:

As, \(T_1=2 \pi \sqrt{\frac{m}{k_1}}\)
\(
\begin{aligned}
& \Rightarrow T_1^2=4 \pi^2 \frac{m}{k_1} \Rightarrow k_1=\frac{4 \pi^2 m}{T_1^2} \\
& \text { and } T_2=2 \pi \sqrt{\frac{m}{k_2}} \Rightarrow T_2^2=4 \pi^2 \frac{m}{k_2} \Rightarrow k_2=\frac{4 \pi^2 m}{T_2^2}
\end{aligned}
\)
Now, \(T=2 \pi \sqrt{\frac{m}{k^{\prime}}}\)
where, \(\frac{1}{k^{\prime}}=\frac{1}{k_1}+\frac{1}{k_2}\)
\(
\Rightarrow \quad k^{\prime}=\frac{k_1 k_2}{k_1+k_2}=\frac{\left(\frac{4 \pi^2 m}{T_1^2}\right)\left(\frac{4 \pi^2 m}{T_2^2}\right)}{\frac{4 \pi^2 m}{T_1^2}+\frac{4 \pi^2 m}{T_2^2}}
\)
\(
k^{\prime}=\frac{4 \pi^2 m\left(\frac{4 \pi^2 m}{T_1^2 T_2^2}\right)}{4 \pi^2 m\left(\frac{1}{T_1^2}+\frac{1}{T_2^2}\right)}=\frac{4 \pi^2 m}{T_1^2+T_2^2}
\)
\(\therefore \quad T=2 \pi \sqrt{\frac{m}{k^{\prime}}}=2 \pi \sqrt{\frac{m}{\frac{4 \pi^2 m}{T_1^2+T_2^2}}}=\sqrt{T_1^2+T_2^2}\)
The physical pendulum
Any rigid body suspended from a rigid support capable of oscillating about a horizontal axis passing through it constitutes a physical pendulum (or compound pendulum). The figure given below shows a rigid body pivoted at \(O\), so that it can oscillate without friction about an axis passing through \(O\).
In equilibrium, the centre of gravity \((G)\) is directly below \(O\). In the position shown in the figure, the body is displaced from equilibrium by an angle \(\theta\). The distance from \(O\) to the centre of gravity is \(l\). Let, the moment of inertia of the body about the axis of rotation through \(O\) is \(I\) and the total mass is \(m\). In the displaced position, the weight \(m g\) causes a restoring torque, \(\tau=-(m g)(l \sin \theta)\)

The negative sign shows that the restoring torque is clockwise when the displacement is counterclockwise and vice-versa.
For small oscillations,
\(
\sin \theta \approx \theta \text { and } \Sigma \tau=I \alpha \Rightarrow-(m g l) \theta=I \alpha
\)
As \(\alpha\) is proportional to \(-\theta\), the motion is simple harmonic, the time period of which is
\(
T=2 \pi \sqrt{\left|\frac{\theta}{\alpha}\right|}
\)
or \(T=2 \pi \sqrt{\frac{I}{m g l}}\)
Note: Time period of some common physical pendulum
(i) \(B a r, T=2 \pi \sqrt{\frac{2 l}{3 g}}\)
(ii) Ring, \(T=2 \pi \sqrt{\frac{2 R}{g}}\)
(iii) Disc, \(T=2 \pi \sqrt{\frac{3 R}{2 g}}\)
Example 16: A uniform circular disc of radius \(R\) oscillates in a vertical plane about a horizontal axis. Find the distance of the axis of rotation from the centre for which the period is minimum. What is the value of this period?
Solution: The time period of a compound pendulum is minimum when its length is equal to the radius of gyration about its centre of gravity, i.e. \(l=K\)
Since, the moment of inertia of a disc about an axis perpendicular to its plane and passing through its centre is equal to, \(\quad I=M K^2=\frac{1}{2} M R^2 \Rightarrow K=\frac{R}{\sqrt{2}}\)
Thus, the disc will oscillate with the minimum time period when the distance of the axis of rotation from the centre is \(\frac{R}{\sqrt{2}}\).
and the value of this minimum time period will be
\(
T_{\min }=2 \pi \sqrt{\frac{2 R / \sqrt{2}}{g}}=2 \pi \sqrt{\frac{\sqrt{2} R}{g}} \text { or } T_{\min } \approx 2 \pi \sqrt{\frac{1.414 R}{g}}
\)
Example 17: Find the period of small oscillations of a uniform rod with length \(l\), pivoted at one end.
Solution: Time period of a uniform rod which is the same as the physical pendulum,

\(
T=2 \pi \sqrt{\frac{I_0}{m g(O G)}}
\)
Here, \(I_0=\frac{1}{3} m l^2\) and \(O G=\frac{l}{2}\)
\(\therefore \quad T=2 \pi \sqrt{\frac{\left(\frac{1}{3} m l^2\right)}{(m)(g)\left(\frac{l}{2}\right)}}\)
or \(\quad T=2 \pi \sqrt{\frac{2 l}{3 g}}\)
Example 18: A ring of radius \(r\) is suspended from a point on its circumference. Determine its angular frequency of small oscillations.

Solution: It is a physical pendulum, the time period of which is,
\(
T=2 \pi \sqrt{\frac{I}{m g l}}
\)
Here, \(I=\) moment of inertia of the ring about point of suspension
\(
=m r^2+m r^2=2 m r^2
\)
and \(l=\) distance of point of suspension from centre of gravity \(=r\)
\(\therefore\) \(T=2 \pi \sqrt{\frac{2 m r^2}{m g r}}=2 \pi \sqrt{\frac{2 r}{g}}\)
Hence, angular frequency, \(\omega=\frac{2 \pi}{T}\) or \(\quad \omega=\sqrt{\frac{g}{2 r}}\)
Example 19: What is the length of a simple pendulum, which ticks seconds?
Solution: The time period of a simple pendulum is given by,
\(
T=2 \pi \sqrt{\frac{L}{g}}
\)
From this relation one gets,
\(
L=\frac{g T^2}{4 \pi^2}
\)
The time period of a simple pendulum, which ticks seconds, is 2 s. Therefore, for \(g=9.8 \mathrm{~m} \mathrm{~s}^{-2}\) and \(T=2 \mathrm{~s}, L\) is
\(
\begin{aligned}
& =\frac{9.8\left(\mathrm{~m} \mathrm{~s}^{-2}\right) \times 4\left(\mathrm{~s}^2\right)}{4 \pi^2} \\
& =1 \mathrm{~m}
\end{aligned}
\)