Conceptual PCQs
SUMMARY
- The motion that repeats itself is called periodic motion.
- The period \(T\) is the time reequired for one complete oscillation, or cycle. It is related to the frequency v by,
\(
T=\frac{1}{f}
\)
The frequency \(v\) of periodic or oscillatory motion is the number of oscillations per unit time. In the SI, it is measured in hertz :
\(
1 \text { hertz }=1 \mathrm{~Hz}=1 \text { oscillation per } \text { second }=1 \mathrm{~s}^{-1}
\) - In simple harmonic motion (SHM), the displacement \(x(t)\) of a particle from its equilibrium position is given by,
\(
x(t)=A \cos (\omega t+\phi) \quad(\text { displacement }),
\)
in which \(A\) is the amplitude of the displacement, the quantity (\(\omega t+\phi\)) is the phase of the motion, and \(\phi\) is the phase constant. The angular frequency \(\omega\) is related to the period and frequency of the motion by,
\(
\omega=\frac{2 \pi}{T}=2 \pi f \quad \text { (angular frequency). }
\) - Simple harmonic motion can also be viewed as the projection of uniform circular motion on the diameter of the circle in which the latter motion occurs.
- The particle velocity and acceleration during SHM as functions of time are given by,
\(
\begin{aligned}
v(t) & =-\omega A \sin (\omega t+\phi) \text { (velocity), } \\
a(t) & =-\omega^2 A \cos (\omega t+\phi) \\
& =-\omega^2 X(t) \text { (acceleration), }
\end{aligned}
\) - The force acting in a simple harmonic motion is proportional to the displacement and is always directed towards the centre of motion.
- A particle executing simple harmonic motion has, at any time, kinetic energy \(K=1 / 2 m v^2\) and potential energy \(U=1 / 2 k x^2\). If no friction is present the mechanical energy of the system, \(E=K+U\) always remains constant even though \(K\) and \(U\) change with time.
- A particle of mass \(m\) oscillating under the influence of Hooke’s law restoring force given by \(F=-k x\) exhibits simple harmonic motion with
\(
\begin{aligned}
&\begin{array}{llr}
\omega=\sqrt{\frac{k}{m}} & & \text { (angular frequency) } \\
T=2 \pi \sqrt{\frac{m}{k}} & & \text { (period) }
\end{array}\\
&\text { Such a system is also called a linear oscillator. }
\end{aligned}
\) - The motion of a simple pendulum swinging through small angles is approximately simple harmonic. The period of oscillation is given by,
\(
T=2 \pi \sqrt{\frac{L}{g}}
\)
Quiz Summary
0 of 57 Questions completed
Questions:
Information
You have already completed the quiz before. Hence you can not start it again.
Quiz is loading…
You must sign in or sign up to start the quiz.
You must first complete the following:
Results
Results
0 of 57 Questions answered correctly
Your time:
Time has elapsed
You have reached 0 of 0 point(s), (0)
Earned Point(s): 0 of 0, (0)
0 Essay(s) Pending (Possible Point(s): 0)
Categories
- Not categorized 0%
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- Current
- Review
- Answered
- Correct
- Incorrect
- Question 1 of 57
1. Question
A student says that he had applied a force \(F=-k \sqrt{ } x\) on a particle and the particle moved in simple harmonic motion. He refuses to tell whether \(k\) is a constant or not. Assume that he has worked only with positive \(x\) and no other force acted on the particle.
CorrectIncorrectHint
(a) For a particle to execute SHM, the restoring force \(F\) must be directly proportional to the displacement \(x\) from the mean position and directed opposite to it. The standard equation is:
\(
F=-C x
\)
(Where \(C\) is a positive constant often called the force constant).
Analyzing the Student’s Force
The student applied a force:
\(
F=-k \sqrt{x}
\)
If we want this specific motion to be SHM, we must set the student’s force equal to the standard SHM force:
\(
-k \sqrt{x}=-C x
\)
Now, let’s solve for \(k\) :
\(
\begin{gathered}
k=\frac{C x}{\sqrt{x}} \\
k=C \sqrt{x}
\end{gathered}
\)
Conclusion:
Since \(C\) is a constant, we can see that for the motion to be SHM, \(k\) must be proportional to \(\sqrt{x}\).
As the displacement \(x\) increases, \(\sqrt{x}\) also increases.
Therefore, as \(x\) increases, \(k\) must increase to maintain the linear relationship required for SHM. - Question 2 of 57
2. Question
The time period of a particle in simple harmonic motion is equal to the time between consecutive appearances of the particle at a particular point in its motion. This point is
CorrectIncorrectHint
(b) an extreme position
Understanding the Time Period (\(T\)):
The time period of SHM is defined as the time taken to complete one full cycle. This means the particle must return to the exact same position and be moving in the exact same direction as it was at \(t=0\).Evaluating the Options
(a) The Mean Position: As the particle oscillates, it passes the mean position twice in one cycle (once moving right, once moving left). The time between these “consecutive appearances” is only \(T / 2\).
(c) & (d) Intermediate Points: Similar to the mean position, if a particle is at \(x=+A / 2\) moving toward the extreme, it will soon return to \(x=+A / 2\) moving toward the center. The time between these two appearances is less than the full time period \(T\).
(b) An Extreme Position: At the extreme positions (\(x=+A\) or \(x=-A\)), the particle’s velocity is momentarily zero. It reaches this point, stops, and reverses. It does not “pass through” to the other side and return from behind; it only reaches this point once per cycle.
Therefore, the time between consecutive appearances at an extreme position is exactly one full time period \(T\). - Question 3 of 57
3. Question
The time period of a particle in simple harmonic motion is equal to the smallest time between the particle acquiring a particular velocity \(v\). The value of \(v\) is
CorrectIncorrectHint
(a) Velocity at the Mean Position (\(v= \pm v_{\text {max }}\)):
At the equilibrium or mean position (\(x=0\)), the particle attains its maximum speed. However, velocity is a vector:
As the particle moves to the right, \(v=+v_{\text {max }}\).
As the particle moves to the left, \(v=-v_{\text {max }}\).
To acquire \(+v_{\text {max }}\) again, the particle must travel to the positive extreme, come back through the mean position (where \(v=-v_{\text {max }}\)), travel to the negative extreme, and finally return to the mean position moving right. This takes exactly one full time period (\(T\)).
Velocity at Intermediate Points (\(0<|v|<v_{\text {max }}\)):
At any point between the mean and the extremes, the particle has a specific velocity \(v\). It will reach the extreme, reverse direction, and pass that same point with velocity \(-v\). To acquire the original velocity \(v\) again, it must complete the rest of the circuit and return to that point moving in the original direction. The smallest time interval for this is also \(T\).
Velocity at Extreme Positions (\(v=0\)):
At the extreme positions (\(x=+A\) and \(x=-A\)), the velocity of the particle is momentarily zero.
The particle has \(v=0\) at the positive extreme.
The next time it acquires \(v=0\) is at the negative extreme.
The time taken to travel from one extreme to the other is exactly half the time period (\(T / 2\)). Therefore, the smallest time between the particle acquiring \(v=0\) is \(T / 2\).
The question states that the time period (\(T\)) is equal to the smallest time between acquiring the velocity.
If \(v=0\), the smallest time is \(T / 2\).
If \(v=v_{\text {max }}\) (or \(-v_{\text {max }}\)), the smallest time is \(T\).
Therefore, the velocity \(v\) must be \(v_{\text {max }}\). - Question 4 of 57
4. Question
The displacement of a particle in simple harmonic motion in one time period is
CorrectIncorrectHint
(d) In physics, displacement is defined as the change in position of an object, or the straight-line distance between the starting point and the ending point.
Analyzing One Full Time Period (\(T\)):
One full time period is the time it takes for a particle to complete one full cycle of its motion.
This means:
The particle starts at a specific point (e.g., the mean position).
It moves to one extreme \((+A)\).
It passes back through the mean position to the other extreme (\(-A\)).
It returns exactly to its original starting point with its original velocity.
Since the final position is identical to the initial position after one full time period, the change in position is zero. - Question 5 of 57
5. Question
The distance moved by a particle in simple harmonic motion in one time period is
CorrectIncorrectHint
(c) Path of the Particle in One Cycle:
Let’s assume the particle starts at the mean position (\(x=0\)) and moves through one complete oscillation:
1. Mean to Positive Extreme: Moves from 0 to \(+A\).
Distance \(=A\)
2Positive Extreme to Mean: Moves back from \(+A\) to 0.
Distance \(=A\)
3. Mean to Negative Extreme: Moves from 0 to \(-A\).
Distance \(=A\)
4. Negative Extreme back to Mean: Moves from \(-A\) to 0.
Distance \(=A\)
Adding these segments together:
\(
\text { Total Distance }=A+A+A+A=4 A
\)
This holds true regardless of where the particle starts. If it starts at an extreme, it travels \(2 A\) to reach the opposite extreme and another \(2 A\) to return, still totaling \(4 A\). - Question 6 of 57
6. Question
The average acceleration in one time period in a simple harmonic motion is
CorrectIncorrectHint
(d) Definition of Average Acceleration:
Average acceleration \(\left(a_{\text {avg }}\right)\) is defined as the total change in velocity \((\Delta v)\) divided by the total time interval \((\Delta t)\) :
\(
a_{a v g}=\frac{v_{\text {final }}-v_{\text {initial }}}{\Delta t}
\)
Velocity in One Full Cycle:
In Simple Harmonic Motion (SHM), one full time period ( \(T\) ) represents a complete oscillation. This means the particle returns to its exact starting position and its exact starting velocity.
If the velocity at \(t=0\) is \(v_0\), then at \(t=T\), the velocity is once again \(v_0\).
Therefore, the change in velocity is:
\(
\Delta v=v(T)-v(0)=v_0-v_0=0
\)
Substituting this into our average acceleration formula:
\(
a_{a v g}=\frac{0}{T}=0
\)
Why this makes sense conceptually?
Acceleration in SHM is a vector that always points toward the mean position (\(a=-\omega^2 x\)).
During the first half-cycle, the acceleration acts in one direction.
During the second half-cycle, the acceleration acts in the opposite direction with the same magnitudes.
Over one full period, these opposing acceleration vectors perfectly cancel each other out. - Question 7 of 57
7. Question
The motion of a particle is given by \(x=A \sin \omega t+B \cos \omega t\). The motion of the particle is
CorrectIncorrectHint
(d) Step 1: Using the Superposition Principle
This expression represents the superposition of two independent simple harmonic motions that are \(90^{\circ}\) out of phase with each other. Any function that can be written in the form \(x= R \sin (\omega t+\phi)\) is, by definition, Simple Harmonic Motion.
Step 2: Finding the Resultant Amplitude (\(R\))
We can use a common trigonometric substitution. Let:
\(A=R \cos \phi\)
\(B=R \sin \phi\)
Substituting these into the original equation:
\(
\begin{gathered}
x=(R \cos \phi) \sin \omega t+(R \sin \phi) \cos \omega t \\
x=R(\sin \omega t \cos \phi+\cos \omega t \sin \phi)
\end{gathered}
\)
Using the identity \(\sin (a+b)=\sin a \cos b+\cos a \sin b\), we get:
\(
x=R \sin (\omega t+\phi)
\)
Step 3: Calculating the value of \(R\)
To find the amplitude \(R\), square and add our substitutions for \(A\) and \(B\) :
\(
\begin{gathered}
A^2+B^2=(R \cos \phi)^2+(R \sin \phi)^2 \\
A^2+B^2=R^2\left(\cos ^2 \phi+\sin ^2 \phi\right) \\
A^2+B^2=R^2 \cdot 1 \\
R=\sqrt{A^2+B^2}
\end{gathered}
\)
The motion is simple harmonic because it follows the standard SHM form, and its resultant amplitude is the vector sum of the two individual coefficients. - Question 8 of 57
8. Question
The displacement of a particle is given by \(\vec{r}=A(\vec{i} \cos \omega t+\vec{j} \sin \omega t)\). The motion of the particle is
CorrectIncorrectHint
(c) To determine the nature of the motion, we can analyze the position coordinates of the particle provided by the vector equation:
\(
r=x \hat{i}+y \hat{j}
\)
Identify the Coordinates:
From the given equation \(r=A(\cos \omega t \cdot \hat{i}+\sin \omega t \cdot \hat{j})\), we can separate the \(x\) and \(y\) components:
\(x=A \cos \omega t\)
\(y=A \sin \omega t\)
Determine the Path (Trajectory):
To find the relationship between \(x\) and \(y\), we square both components and add them together:
\(
\begin{gathered}
x^2+y^2=(A \cos \omega t)^2+(A \sin \omega t)^2 \\
x^2+y^2=A^2\left(\cos ^2 \omega t+\sin ^2 \omega t\right)
\end{gathered}
\)
Since \(\cos ^2 \theta+\sin ^2 \theta=1\), the equation simplifies to:
\(
x^2+y^2=A^2
\)
Analyze the Result:
The equation \(x^2+y^2=A^2\) is the standard mathematical form for a circle centered at the origin \((0,0)\) with a radius \(A\).
Why it’s not (a): While the individual \(x\) and \(y\) components are oscillating harmonically, the resultant motion of the particle itself is circular, not a back-and-forth motion along a single path.
Why it’s not (d): In uniform circular motion, the acceleration (centripetal) has a constant magnitude (\(\omega^2 A\)), but its direction is constantly changing as it always points toward the center. Therefore, the acceleration vector is not constant. - Question 9 of 57
9. Question
A particle moves on the \(X\)-axis according to the equation \(x=A+B \sin \omega t\). The motion is simple harmonic with amplitude
CorrectIncorrectHint
(b) To find the amplitude, we need to look at how the particle oscillates around its equilibrium position.
Identify the Mean Position:
In the equation \(x=A+B \sin \omega t\) :
\(A\) is a constant offset. It represents the mean position (or equilibrium position) of the particle. If you take the average value of \(x\) over one period, it equals \(A\).
\(B \sin \omega t\) is the oscillatory part of the motion.
Determine the Extremes:
The sine function \(\sin \omega t\) fluctuates between a maximum value of +1 and a minimum value of -1.
Maximum displacement ( \(x_{\text {max }}\) ): \(A+B(1)=A+B\)
Minimum displacement \(\left(x_{\min }\right): A+B(-1)=A-B\)
Calculate Amplitude:
The amplitude of SHM is defined as the maximum displacement from the mean position.
\(
\begin{aligned}
& \text { Amplitude }=x_{\max }-\text { Mean Position } \\
& \text { Amplitude }=(A+B)-A=B
\end{aligned}
\)
Alternatively, you can think of it as half the distance between the two extremes:
\(
\text { Amplitude }=\frac{(A+B)-(A-B)}{2}=\frac{2 B}{2}=B
\) - Question 10 of 57
10. Question
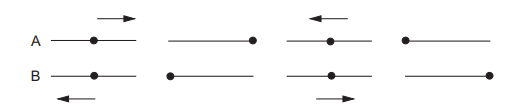
Figure below represents two simple harmonic motions.

The parameter which has different values in the two motions is
CorrectIncorrectHint
(c) Based on the figure provided, which illustrates two particles (A and B) executing Simple Harmonic Motion (SHM), we can compare their motion parameters by observing their positions and directions of movement.
Analyzing the Motions:
1. Amplitude (\(\boldsymbol{A}\)): Both particles oscillate between the same spatial limits (the length of the horizontal lines is the same). Therefore, they have the same amplitude.
2. Frequency (\(f\) or \(\omega\)): The figure shows a sequence of “snapshots.” In each snapshot, both particles are at corresponding points in their cycles (e.g., when one is at the center, the other is at the center; when one is at an extreme, the other is at the opposite extreme). This synchronization implies they complete cycles at the same rate. Therefore, they have the same frequency.
3. Maximum Velocity (\(v_{\text {max }}\)): Since \(v_{\text {max }}=\omega A\), and we have established that both \(\omega\) and \(A\) are the same for both particles, they have the same maximum velocity.
4. Phase \((\phi)\) : Look at the first snapshot. While both particles are at the mean position, Particle A is moving to the right while Particle B is moving to the left. They are moving in opposite directions at the same position, which means they are \(180^{\circ}\) (or \(\pi\) radians) out of sync.Conclusion: The parameter which has different values in the two motions is the phase. Specifically, these two motions are in opposite phase (antiphase).
- Question 11 of 57
11. Question
The total mechanical energy of a spring-mass system in simple harmonic motion is \(E=\frac{1}{2} m \omega^2 A^2\). Suppose the oscillating particle is replaced by another particle of double the mass while the amplitude \(A\) remains the same. The new mechanical energy will
CorrectIncorrectHint
(d) To determine what happens to the total mechanical energy, we need to look closely at how the variables in the energy formula are related for a specific physical system like a spring-mass oscillator.
The Energy Formula:
The total mechanical energy \(E\) of a system in Simple Harmonic Motion (SHM) is given by:
\(
E=\frac{1}{2} m \omega^2 A^2
\)
At first glance, it might appear that doubling the mass (\(m\)) would double the energy. However, in a spring-mass system, the angular frequency \(\omega\) is not independent of the mass.
The Relationship between \(\omega\) and \(m\):
For a mass \(m\) attached to a spring with a force constant \(k\), the angular frequency is defined as:
\(
\omega=\sqrt{\frac{k}{m}}
\)
Squaring both sides gives us:
\(
\omega^2=\frac{k}{m}
\)
Substituting into the Energy Equation:
If we substitute the expression for \(\omega^2\) back into the energy formula:
\(
E=\frac{1}{2} m\left(\frac{k}{m}\right) A^2
\)
The mass terms (\(m\)) cancel out, leaving:
\(
E=\frac{1}{2} k A^2
\)
In this form, we can see that the total mechanical energy of a spring-mass system depends only on the spring constant (k) and the amplitude (A).
The spring constant \(k\) is a property of the spring itself and does not change when the particle is replaced.
The problem states that the amplitude \(A\) remains the same.
Since neither \(k\) nor \(A\) changes, the total mechanical energy remains exactly the same, regardless of the mass of the oscillating particle.
Key Concept: When the mass is doubled, the system simply oscillates more slowly (the frequency decreases), but it does so in a way that the total energy stored in the “stretch” of the spring at the extremes remains constant. - Question 12 of 57
12. Question
The average energy in one time period in simple harmonic motion is
CorrectIncorrectHint
(a) Total Mechanical Energy (\(E\)):
In a frictionless simple harmonic oscillator, the total mechanical energy is the sum of kinetic energy (\(K\)) and potential energy (\(U\)). As the particle oscillates, energy constantly shuffles between these two forms, but their sum remains constant at every instant:
\(
E=K+U=\frac{1}{2} m \omega^2 A^2
\)
Since the total energy is constant throughout the motion, its average value over any time interval (including one full period) is simply the value itself.
Average Kinetic vs. Average Potential Energy:
While the total energy is \(\frac{1}{2} m \omega^2 A^2\), the individual components behave differently when averaged over time:
The Average Kinetic Energy over one period is \(\frac{1}{4} m \omega^2 A^2\).
The Average Potential Energy over one period is \(\frac{1}{4} m \omega^2 A^2\).
When you add these two averages together, you get the average total energy:
\(
\text { Average Total Energy }=\frac{1}{4} m \omega^2 A^2+\frac{1}{4} m \omega^2 A^2=\frac{1}{2} m \omega^2 A^2
\)
Conclusion
The “average energy” of the system refers to the total mechanical energy. Because the total energy does not fluctuate over time, its average value is equal to its instantaneous value. - Question 13 of 57
13. Question
A particle executes simple harmonic motion with a frequency \(f\). The frequency with which the kinetic energy oscillates is
CorrectIncorrectHint
(c) Understanding the Particle’s Motion:
A particle in SHM moves from the mean position to one extreme, back to the mean, to the other extreme, and finally back to the mean. This entire sequence constitutes one oscillation of the particle (frequency \(f\)).
Tracking the Kinetic Energy (\(K E\)):
Kinetic energy depends on the square of the velocity (\(K E=\frac{1}{2} m v^2\)). It reaches its maximum at the mean position and drops to zero at the extreme positions.
Let’s trace the \(K E\) during one full oscillation of the particle:
Start at Mean: \(K E\) is maximum.
Move to Positive Extreme: \(K E\) drops to zero.
Return to Mean: \(K E\) returns to maximum. (This is one full cycle for \(K E\))
Move to Negative Extreme: \(K E\) drops to zero again.
Return to Mean: \(K E\) returns to maximum again. (This is the second full cycle for \(K E\))
Conclusion:
In the time it takes the particle to complete one oscillation, the kinetic energy has completed two full cycles (Maximum → Zero → Maximum).
Mathematically, if \(x=A \sin (\omega t)\), then \(v=A \omega \cos (\omega t)\).
The kinetic energy is:
\(
K E=\frac{1}{2} m(A \omega \cos \omega t)^2=\frac{1}{2} m A^2 \omega^2 \cos ^2 \omega t
\)
Using the trigonometric identity \(\cos ^2 \theta=\frac{1+\cos 2 \theta}{2}\), we see:
\(
K E \propto \cos (2 \omega t)
\)
The angular frequency of the kinetic energy is \(2 \omega\), which means its frequency is \(2 f\). - Question 14 of 57
14. Question
A particle executes simple harmonic motion under the restoring force provided by a spring. The time period is \(T\). If the spring is divided in two equal parts and one part is used to continue the simple harmonic motion, the time period will
CorrectIncorrectHint
(d) To solve this, we need to understand how the spring constant (\(k\)) changes when a spring is cut, and how that affects the time period (\(T\)).
Effect of Cutting the Spring:
The spring constant \(k\) is inversely proportional to the natural length \(L\) of the spring (\(k \propto 1 / L\)). This is because a shorter spring is “stiffer” and requires more force to stretch it by the same amount.
If the spring is divided into two equal parts, the length of one part becomes \(L / 2\).
Consequently, the spring constant for that one part (\(k^{\prime}\)) doubles:
\(
k^{\prime}=2 k
\)
Effect on the Time Period:
The time period \(T\) of a spring-mass system is given by the formula:
\(
T=2 \pi \sqrt{\frac{m}{k}}
\)
If we use one of the new, shorter spring parts with the same mass \(m\), the new time period \(T^{\prime}\) will be:
\(
T^{\prime}=2 \pi \sqrt{\frac{m}{k^{\prime}}}
\)
\(
T^{\prime}=2 \pi \sqrt{\frac{m}{2 k}}
\)
Comparing the Time Periods:
We can rewrite the expression for \(T^{\prime}\) in terms of the original \(T\) :
\(
\begin{gathered}
T^{\prime}=\frac{1}{\sqrt{2}}\left(2 \pi \sqrt{\frac{m}{k}}\right) \\
T^{\prime}=\frac{T}{\sqrt{2}}
\end{gathered}
\) - Question 15 of 57
15. Question
Two bodies \(A\) and \(B\) of equal mass are suspended from two separate massless springs of spring constant \(k_1\) and \(k_2\) respectively. If the bodies oscillate vertically such that their maximum velocities are equal, the ratio of the amplitude of \(A\) to that of \(B\) is
CorrectIncorrectHint
(d) To find the ratio of the amplitudes, we need to use the relationship between maximum velocity, angular frequency, and amplitude in Simple Harmonic Motion.
Maximum Velocity Formula:
The maximum velocity (\(v_{\text {max }}\)) of an oscillating body is given by:
\(
v_{\max }=\omega A
\)
Where:
\(\omega\) is the angular frequency.
\(A\) is the amplitude.
Angular Frequency for a Spring-Mass System:
For a mass \(m\) suspended from a spring with constant \(k\), the angular frequency is:
\(
\omega=\sqrt{\frac{k}{m}}
\)
Substituting this into the velocity formula, we get:
\(
v_{\max }=\sqrt{\frac{k}{m}} \cdot A
\)
Setting up the Equality:
The problem states that the maximum velocities of \(A\) and \(B\) are equal (\(v_A=v_B\)) and their masses are equal (\(m_A=m_B=m\)).
\(
\sqrt{\frac{k_1}{m}} \cdot \boldsymbol{A}_1=\sqrt{\frac{k_2}{m}} \cdot \boldsymbol{A}_2
\)
Since the mass \(m\) is the same on both sides, we can cancel out \(\sqrt{m}\) :
\(
\sqrt{k_1} \cdot \boldsymbol{A}_1=\sqrt{k_2} \cdot \boldsymbol{A}_2
\)
Finding the Ratio:
To find the ratio of the amplitude of \(A\left(A_1\right)\) to that of \(B\left(A_2\right)\) :
\(
\begin{aligned}
& \frac{A_1}{A_2}=\frac{\sqrt{k_2}}{\sqrt{k_1}} \\
& \frac{A_1}{A_2}=\sqrt{\frac{k_2}{k_1}}
\end{aligned}
\) - Question 16 of 57
16. Question
A spring-mass system oscillates with a frequency \(f\). If it is taken in an elevator slowly accelerating upward, the frequency will
CorrectIncorrectHint
(c) To determine if the frequency changes, we need to look at the factors that define the frequency of a spring-mass system versus a simple pendulum.
The Frequency Formula:
For a mass \(m\) attached to a spring with force constant \(k\), the frequency \(v\) is given by:
\(
v=\frac{1}{2 \pi} \sqrt{\frac{k}{m}}
\)
Analyzing the Variables:
Mass (\(m\)): The amount of matter in the block does not change, regardless of the elevator’s motion.
Spring Constant (\(k\)): This is an intrinsic property of the spring’s material and geometry. It does not change with acceleration.
Gravity (\(g\)): While the apparent weight of the mass increases in an upward-accelerating elevator (\(w_{\text {app }}=m(g+a)\)), the actual value of \(g\) or the effective acceleration does not appear in the formula for a spring-mass system.
Conclusion:
In a spring-mass system, the restoring force is strictly provided by the spring’s elasticity (\(F= -k x\)), not by gravity. This is a key difference from a pendulum, where the restoring force depends on gravity and the frequency would change in an elevator.
Because \(k\) and \(m\) are constant, the frequency of a spring-mass system remains unaffected by the acceleration of the elevator. - Question 17 of 57
17. Question
A spring-mass system oscillates in a car. If the car accelerates on a horizontal road, the frequency of oscillation will
CorrectIncorrectHint
(c) The Frequency Formula
For a mass \(m\) attached to a spring with a force constant \(k\), the frequency \(f\) is given by:
\(
f=\frac{1}{2 \pi} \sqrt{\frac{k}{m}}
\)
Analyzing the Variables in a Moving Car:
When the car accelerates on a horizontal road:
Mass (\(m\)): The mass of the object is an intrinsic property and remains constant.
Spring Constant (\(k\)): The stiffness of the spring depends on its material and construction; it does not change based on the car’s acceleration.
Restoring Force: The restoring force of the spring is \(F=-k x\), where \(x\) is the displacement from the mean position.
The Effect of Pseudo-Force:
In the frame of the accelerating car, a constant pseudo-force (\(F_p=m a\)) acts on the mass in the direction opposite to the car’s acceleration.
This constant force causes the mean position (equilibrium point) of the spring to shift or “stretch” slightly to a new position where the spring force balances the pseudo-force ( \(\left.k x_{\text {shift }}=m a\right)\).
However, once the mass oscillates around this new mean position, the restoring force for any further displacement remains \(F=-k x\).
Since the acceleration of the car only shifts the equilibrium point but does not alter the mass or the spring’s stiffness, the frequency of oscillation remains unchanged. - Question 18 of 57
18. Question
A pendulum clock that keeps correct time on the earth is taken to the moon. It will run
CorrectIncorrectHint
(d) To determine how the pendulum clock behaves on the moon, we need to look at the formula for the time period of a simple pendulum.
The Time Period Formula:
The time period \(T\) of a simple pendulum is given by:
\(
T=2 \pi \sqrt{\frac{L}{g}}
\)
Where:
\(L\) is the length of the pendulum.
\(g\) is the acceleration due to gravity.
Gravity on the Moon:
The acceleration due to gravity on the moon \(\left(g_m\right)\) is much weaker than on Earth \(\left(g_e\right)\). It is approximately one-sixth of Earth’s gravity:
\(
g_m=\frac{g_e}{6}
\)
Comparing Time Periods:
If we take the clock to the moon, the new time period \(T_m\) will be:
\(
\begin{gathered}
T_m=2 \pi \sqrt{\frac{L}{g_e / 6}} \\
T_m=\sqrt{6}\left(2 \pi \sqrt{\frac{L}{g_e}}\right) \\
T_m=\sqrt{6} \cdot T_e
\end{gathered}
\)
Conclusion:
The time period is the time taken for one swing. Since \(T_m\) is \(\sqrt{6}\) times larger than \(T_e\), each second “tick” of the clock now takes \(\sqrt{6}\) times longer to complete.
Because each swing takes more time, the clock completes fewer swings in an hour.
Therefore, the clock runs slower by a factor of \(\sqrt{6}\). - Question 19 of 57
19. Question
A wall clock uses a vertical spring-mass system to measure the time. Each time the mass reaches an extreme position, the clock advances by a second. The clock gives correct time at the equator. If the clock is taken to the poles it will
CorrectIncorrectHint
(d) To determine how the clock behaves at the poles, we need to identify which physical property governs its “ticking” and whether that property changes with geographic location.
The Mechanism of the Clock:
The problem states the clock uses a spring-mass system. The time interval between “ticks” is determined by the time period \(T\) of the oscillation. For a spring-mass system, the formula is:
\(
T=2 \pi \sqrt{\frac{m}{k}}
\)
Analyzing the Variables:
Mass (\(m\)): The amount of matter in the oscillating block is an intrinsic property. It remains the same whether the clock is at the equator, the poles, or even in deep space.
Spring Constant (\(k\)): This represents the stiffness of the spring, which depends on the material (like steel) and its physical dimensions. It is not affected by gravity.
The Role of Gravity (\(g\)):
In a simple pendulum, the restoring force is provided by gravity, so its time period \(T= 2 \pi \sqrt{L / g}\) depends on \(g\). Because \(g\) is slightly higher at the poles than at the equator, a pendulum clock would run fast at the poles.
However, in a spring-mass system, the restoring force is provided entirely by the spring’s elasticity (\(F=-k x\)). While gravity causes the spring to have a different “equilibrium stretch” (the starting point of the oscillation is lower at the poles), it does not change the rate at which the mass bounces up and down.
Conclusion:
Since neither \(m\) nor \(k\) changes when moving from the equator to the poles, the time period \(T\) remains constant. Therefore, the clock will continue to advance by one second at the exact same intervals. - Question 20 of 57
20. Question
A pendulum clock keeping correct time is taken to high altitudes,
CorrectIncorrectHint
(c) To solve this, we need to look at how gravity changes with altitude and how that affects the “ticking” of a pendulum.
The Time Period Formula:
The time period \(T\) (the time for one complete swing) of a simple pendulum is:
\(
T=2 \pi \sqrt{\frac{L}{g}}
\)
Where \(L\) is the length of the pendulum and \(g\) is the acceleration due to gravity.
Gravity at High Altitudes:
As you move to high altitudes (away from the center of the Earth), the acceleration due to gravity decreases.
\(
g_{\text {altitude }}<g_{\text {surface }}
\)
Effect on the Clock:
According to the formula, if \(g\) decreases, the denominator becomes smaller, which makes the time period \(T\) increase.
A larger \(T\) means each swing takes more time.
This causes the clock to “lose” time or run slow.
How to Correct the Time:
To keep the correct time, we need to bring the time period \(T\) back down to its original value. Since we cannot change the fact that \(g\) is lower at high altitudes, we must change the only other variable we control: the length (\(L\)).
Looking at the relationship \(T \propto \sqrt{L / g}\), if \(g\) has decreased, we must decrease \(L\) proportionally to keep the ratio \(L / g\) constant. By shortening the pendulum, we make it swing faster, compensating for the “laziness” caused by the weaker gravity. - Question 21 of 57
21. Question
The free end of a simple pendulum is attached to the ceiling of a box. The box is taken to a height and the pendulum is oscillated. When the bob is at its lowest point, the box is released to fall freely. As seen from the box during this period, the bob will
CorrectIncorrectHint
(c) To understand what happens to the bob, we need to analyze the forces acting on it in a noninertial frame of reference (the falling box).
The Concept of Free Fall:
When the box is released, it falls with an acceleration equal to \(g\). Inside this falling box, every object experiences a pseudo-force acting upward, equal to \(m g\).
Effective gravity \(\left(g_{e f f}\right)\) : The downward gravitational pull is perfectly balanced by the upward pseudo-force.
\(
g_{e f f}=g-g=0
\)
In a state of free fall, the “weight” of the bob effectively disappears.
Motion at the Lowest Point:
The problem states that the box is released exactly when the bob is at its lowest point. At this specific position in a normal oscillation, the bob possesses its maximum horizontal velocity (\(v_{\text {max }}\)).
What Happens to the String?:
Once \(g_{\text {eff }}=0\), there is no gravitational restoring force to pull the bob back toward the center. However, the bob still has its horizontal velocity.
Because the bob is attached to a string of fixed length \(L\), it cannot fly off in a straight line.
The string will act as a constraint, providing the necessary centripetal force to keep the bob at a constant distance \(\)L\(\) from the ceiling attachment.
Conclusion:
With no gravity to slow it down or pull it back, the bob will use its inertia and the tension in the string to move in a complete vertical circle at a constant speed. From the perspective of an observer inside the box, the bob isn’t “oscillating” anymore; it is performing uniform circular motion. - Question 22 of 57
22. Question
Select the correct statements.
CorrectIncorrectHint
(a, b) To understand why, it helps to look at the hierarchy of these types of motion. You can think of it as a funnel: Periodic → Oscillatory → Simple Harmonic.
Analysis of the Statements
(a) A simple harmonic motion is necessarily periodic: CORRECT.Simple Harmonic Motion (SHM) follows a strict mathematical repeat pattern defined by sine or cosine functions (e.g., \(x(t)=A \cos (\omega t+\phi)\)). Because these functions repeat their values at regular intervals ( \(T=\frac{2 \pi}{\omega}\)), all SHM is periodic.
(b) A simple harmonic motion is necessarily oscillatory: CORRECT.By definition, SHM is a specific type of oscillatory motion where the restoring force is directly proportional to the displacement (\(F=-k x\)). Since the object moves back and forth about a central equilibrium position, it is always oscillatory.
(c) An oscillatory motion is necessarily periodic: INCORRECT.While many oscillations are periodic (like a pendulum), they don’t have to be. For example, damped oscillation-where friction or air resistance causes the amplitude to decrease over time-is oscillatory because it moves back and forth, but it is not periodic because it never returns to the exact same state.
(d) A periodic motion is necessarily oscillatory: INCORRECT.A motion can repeat at regular intervals without moving “back and forth” around an equilibrium point. A classic example is the uniform circular motion of a planet or the hands of a clock. They are periodic (they return to the same spot every 60 seconds or 365 days), but they do not oscillate.
- Question 23 of 57
23. Question
A particle moves in a circular path with a uniform speed. Its motion is
CorrectIncorrectHint
(a) periodic.
Here is the breakdown of why this specific classification applies to uniform circular motion:
Periodic (Correct): The particle returns to the same position after a fixed interval of time (the time period \(T\)). Since the speed is uniform, every revolution takes exactly the same amount of time, satisfying the definition of periodic motion.
Oscillatory (Incorrect): Oscillatory motion requires a particle to move back and forth about a stable equilibrium (mean) position. In a circle, the particle moves continuously in one direction along the path; it never reverses direction to “swing” back.
Simple Harmonic / Angular SHM (Incorrect): These are specific types of oscillations where the restoring force (or torque) is proportional to the displacement. While the projection of circular motion onto a diameter is simple harmonic, the circular motion itself is not.Key Distinction:
A simple way to remember the relationship is that all oscillatory motions are periodic, but not all periodic motions are oscillatory. Uniform circular motion is the classic example of a motion that is periodic but lacks the “to-and-fro” nature required to be oscillatory. - Question 24 of 57
24. Question
A particle is fastened at the end of a string and is whirled in a vertical circle with the other end of the string being fixed. The motion of the particle is
CorrectIncorrectHint
(a) periodic.
This follows the same logic as uniform circular motion, but with a slight twist due to gravity. Here is the breakdown:
Periodic (Correct): As long as the particle has enough initial velocity to complete the loop, it will pass through every point in the circle at regular time intervals. Even though the speed changes (it slows down at the top and speeds up at the bottom due to gravity), the time taken for one full revolution remains constant, making it periodic.
Oscillatory (Incorrect): For the motion to be oscillatory, the particle would need to reverse its direction and move back and forth (like a pendulum). In a full vertical circle, the particle moves in a continuous loop in one direction.
Simple Harmonic / Angular SHM (Incorrect): Since the motion isn’t even oscillatory, it cannot be simple harmonic. SHM requires a specific linear or angular restoring force (\(F=-k x\) or \(\tau=-\kappa \theta\)), which is not the governing dynamic of a full vertical circle.A Note on the “Pendulum” Exception:
It is worth noting that if the particle does not have enough energy to complete the full circle, it will reach a certain height, stop, and swing back. In that specific case, the motion would become oscillatory. However, when a problem specifies “whirled in a vertical circle,” it traditionally implies a complete circular path. - Question 25 of 57
25. Question
A particle moves in a circular path with a continuously increasing speed. Its motion is
CorrectIncorrectHint
(d) none of them.
While this might feel counterintuitive since the particle is still technically “going in a circle,” the change in speed breaks the fundamental rules for the other categories. Here is the breakdown:Why the other options fail:
Not Periodic: For a motion to be periodic, the particle must return to the same position at equal intervals of time. Because the speed is continuously increasing, each successive lap around the circle takes less time than the previous one (\(T_1>T_2>T_3 \ldots\)). Since the time period is not constant, the motion is non-periodic.
Not Oscillatory: As we discussed before, circular motion is a continuous loop in one direction. Oscillatory motion requires a “to-and-fro” movement where the particle reverses direction and passes through a mean position.
Not Simple Harmonic: Simple Harmonic Motion is a specific type of periodic oscillation. Since this motion is neither periodic nor oscillatory, it cannot be SHM. - Question 26 of 57
26. Question
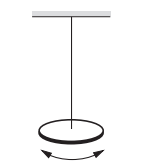
The motion of a torsional pendulum is
CorrectIncorrectHint
Since a torsional pendulum satisfies the definitions of being periodic, oscillatory, and specifically governed by an angular restoring torque, (a), (b), and (d) are all technically correct.
In most physics contexts, (d) angular simple harmonic is considered the “best” or most complete answer because it encompasses the properties of the other two while adding the specific mathematical requirement of the restoring torque (\(\tau=-C \theta\)).
Quick Logic Check:
1. Periodic: It repeats in a fixed time \(T=2 \pi \sqrt{\frac{I}{C}}\).
2. Oscillatory: It moves to-and-fro about an equilibrium position.
3. Angular SHM: The restoring torque is proportional to the angular displacement.
(c) simple harmonic is often excluded in strict technical grading because “Simple Harmonic Motion” usually refers to linear displacement (\(x\)), whereas this system deals with angular displacement (\(\theta\)). - Question 27 of 57
27. Question
Which of the following quantities are always negative in a simple harmonic motion?
CorrectIncorrectHint
(c) and (d).
In Simple Harmonic Motion (SHM), the defining characteristic is that the restoring force (\(F\)) and the resulting acceleration (\(a\)) are always directed toward the equilibrium position, while the displacement vector \((r)\) is directed away from it.Analysis of the Dot Products:
To determine if a dot product is negative, we look at the angle \(\theta\) between the two vectors. If they point in opposite directions \(\left(\theta=180^{\circ}\right)\), the dot product is negative because \(\cos \left(180^{\circ}\right)=-1\).
(a) \(F \cdot a\) (Positive):According to Newton’s Second Law (\(F=m a\)), force and acceleration are always in the same direction. Therefore, the angle between them is \(0^{\circ}\), making their dot product always positive \(\left(F \cdot a \cdot \cos 0^{\circ}\right)\).
(b) \(v \cdot r\) (Changes sign):The velocity \((v)\) and displacement \((r)\) are in the same direction when the particle moves away from the center (positive dot product) and in opposite directions when moving toward the center (negative dot product).
(c) \(a \cdot r\) (Always Negative):In SHM, acceleration is defined by \(a=-\omega^2 r\). This means \(a\) and \(r\) are always in opposite directions.
(d) \(F \cdot r\) (Always Negative):
Since \(F=-k r\), the force is always a “restoring” force pulling the particle back to the center, opposite to the displacement. Like acceleration, the force vector and displacement vector always maintain a \(180^{\circ}\) angle. - Question 28 of 57
28. Question
Which of the following quantities are always positive in a simple harmonic motion?
CorrectIncorrectHint
Correct answer is (a)
(a) In Simple Harmonic Motion (SHM), we evaluate these quantities by looking at the directions of the vectors relative to each other. For a dot product to be always positive, the two vectors must always point in the same direction (the angle \(\theta\) between them must be \(0^{\circ}\), so \(\cos 0^{\circ}=1\)).
Analysis of the Dot Products:
(a) \(F \cdot a\) (Always Positive): According to Newton’s Second Law, \(F=m a\). Since mass(\(m\)) is a positive scalar, the force and acceleration vectors always point in the same direction. Whether the particle is moving toward or away from the center, the force pulling it and the acceleration it experiences are perfectly aligned.
(b) \(v \cdot r\) (Changes Sign): When the particle moves away from the equilibrium position, \(v\) and \(r\) are in the same direction (positive). When it moves back toward the center, \(v\) and \(r\) are in opposite directions (negative). At the extreme positions, \(v\) is zero, making the dot product zero.
(c) \(a \cdot r\) (Always Negative): The defining equation for SHM is \(a=-\omega^2 r\). The negative sign indicates that acceleration and displacement are always in opposite directions. Thus, their dot product is always negative (except at the equilibrium point where it is zero).
(d) \(F \cdot r\) (Always Negative): Similar to acceleration, the restoring force is defined as \(F=-k r\). The force always pulls the particle back toward the center, opposite to the direction of displacement. This results in a dot product that is always negative. - Question 29 of 57
29. Question
Which of the following quantities are always zero in a simple harmonic motion?
CorrectIncorrectHint
You’re absolutely right-all of them are correct. In the context of linear Simple Harmonic Motion, (a), (b), (c), and (d) are all always zero.
In vector mathematics, the cross product of two vectors is zero if the vectors are parallel (\(0^{\circ}\)) or anti-parallel (\(180^{\circ}\)). This is because the magnitude of the cross product is \(|A||B| \sin \theta\), and \(\sin \left(0^{\circ}\right)=\sin \left(180^{\circ}\right)=0\).
Analysis of the Cross Products
(a) \(F \times a\) (Always Zero):From Newton’s Second Law (\(F=m a\)), force and acceleration are always in the same direction \(\left(\theta=0^{\circ}\right)\). Since they are parallel, their cross product is always zero.
(b) \(v \times r\) (Always Zero for Linear SHM):In a standard linear SHM (like a mass on a spring), the velocity vector and the displacement vector both lie along the same straight line. They either point in the same direction or opposite directions. Therefore, \(\theta\) is either \(0^{\circ}\) or \(180^{\circ}\), making the cross product zero.
(c) \(a \times r\) (Always Zero):The fundamental condition for SHM is \(a=-\omega^2 r\). This mathematical relationship dictates that acceleration and displacement are always anti-parallel \(\left(\theta=180^{\circ}\right)\). Since they stay on the same line of action, their cross product is always zero.
(d) \(F \times r\) (Always Zero):Since the restoring force \(F=-k r\) acts in the direction exactly opposite to the displacement, the vectors are anti-parallel. Just like the acceleration vector, the force vector shares the same line of action as the displacement, resulting in a cross product of zero.
Summary:
\(
\begin{array}{|l|l|l|}
\hline \text { Pair } & \text { Relationship } & \text { Why it’s Zero } \\
\hline \begin{array}{l}
\text { (a) } F \times a \\
\end{array} & \text { Always Parallel } & \begin{array}{l}
\text { Force and acceleration always point in the same } \\
\text { direction }(F=m a) .
\end{array} \\
\hline \begin{array}{l}
\text { (b) } v \times r \\
\end{array} & \begin{array}{l}
\text { Parallel or Anti- } \\
\text { parallel }
\end{array} & \begin{array}{l}
\text { Velocity and displacement share the same line of } \\
\text { action. }
\end{array} \\
\hline \begin{array}{l}
\text { (c) } a \times r \\
\end{array} & \begin{array}{l}
\text { Always Anti- } \\
\text { parallel }
\end{array} & \begin{array}{l}
\text { Acceleration is always opposite to displacement }( \\
\left.a=-\omega^2 r\right) .
\end{array} \\
\hline \begin{array}{l}
(\mathrm{d}) F \times r \\
\end{array} & \begin{array}{l}
\text { Always Anti- } \\
\text { parallel }
\end{array} & \begin{array}{l}
\text { Restoring force is always opposite to displacement } \\
(F=-k r) .
\end{array} \\
\hline
\end{array}
\) - Question 30 of 57
30. Question
Suppose a tunnel is dug along a diameter of the earth. A particle is dropped from a point, a distance \(h\) directly above the tunnel. The motion of the particle as seen from the earth is
CorrectIncorrectHint
The correct options are
(c) on a straight line and
(d) periodic.Explanation:
On a straight line: The particle is dropped from a height \(h\) directly above a tunnel dug along the Earth’s diameter. Gravity acts towards the center of the Earth, pulling the particle through the tunnel in a rectilinear path along that diameter.
Periodic: As the particle passes the center, its inertia carries it toward the other side until it reaches height \(h\) above the opposite surface. It then reverses direction and returns to its starting point, repeating this cycle in a fixed time interval (approximately 84.6 minutes), which defines periodic motion.
Not Simple Harmonic Motion (SHM): For SHM, the restoring force must be directly proportional to the displacement \((F \propto-x)\) at all points. While this is true inside the Earth (where gravity varies linearly with distance), it is not true for the part of the journey above the surface (\(h\)), where gravity follows the inverse-square law ( \(F \propto 1 \left./ r^2\right)\). Therefore, the overall motion is periodic but not SHM.Why other options are incorrect?
(a) Simple Harmonic: While the motion inside the tunnel is SHM, the journey includes a section above the surface where the restoring force is proportional to the inverse square of distance, violating the linear proportionality required for SHM.
(b) Parabolic: Parabolic motion occurs in projectile motion when there is a constant horizontal velocity and a vertical acceleration. Since the particle is dropped vertically and moves only along the Earth’s diameter, its path is a straight line, not a curve. - Question 31 of 57
31. Question
For a particle executing simple harmonic motion, the acceleration is proportional to
CorrectIncorrectHint
(a) displacement from the mean position.
In Simple Harmonic Motion (SHM), the defining relationship between acceleration (\(a\)) and position is given by the equation:
\(
a=-\omega^2 x
\)
Here is why (a) is the correct choice compared to the others:
Displacement vs. Distance (a vs. b): Acceleration is a vector quantity. In SHM, the acceleration must always point toward the mean position (opposite to the displacement vector). “Displacement” (\(x\)) accounts for direction, whereas “distance” is a scalar and only accounts for magnitude. The negative sign in the formula \(a=-\omega^2 x\) signifies that \(a\) is proportional to the displacement but acts in the opposite direction.
Distance travelled (c): This is the total path length covered by the particle. As the particle oscillates back and forth, the distance travelled keeps increasing, while the acceleration must periodically decrease to zero at the mean position.
Speed (d): In SHM, acceleration is actually at its minimum (zero) when speed is at its maximum (at the mean position). Conversely, acceleration is at its maximum when the speed is zero (at the extreme positions).Summary of SHM Relationships:
At Mean Position: Displacement = 0, Acceleration = 0, Speed = Maximum.
At Extreme Positions: Displacement \(=\) Maximum , Acceleration \(=\) Maximum, Speed \(=0\). - Question 32 of 57
32. Question
A particle moves in the \(X-Y\) plane according to the equation
\(
\vec{r}=(\vec{i}+2 \vec{j}) A \cos \omega t
\)
The motion of the particle isCorrectIncorrectHint
(a), (c), and (d).
To understand why, let’s break the vector equation into its \(x\) and \(y\) components. The equation given is:
\(
r=(A \cos \omega t) \hat{i}+(2 A \cos \omega t) \hat{j}
\)Motion on a Straight Line (\(a\)):
We can write the individual components as:
\(x=A \cos \omega t\)
\(y=2 A \cos \omega t\)
If we divide \(y\) by \(x\), we get:
\(
\frac{y}{x}=\frac{2 A \cos \omega t}{A \cos \omega t}=2 \Longrightarrow y=2 x
\)
Since \(y=2 x\) is the equation of a line passing through the origin with a slope of 2 , the particle is constrained to move along this straight line.Periodic Motion (\(c\)):
The position depends on the function \(\cos \omega t\). Since the cosine function repeats its values every \(T=\frac{2 \pi}{\omega}\), the particle returns to its original position at regular intervals. Therefore, the motion is periodic.Simple Harmonic Motion (\(d\)):
For a motion to be Simple Harmonic (SHM), the acceleration must be proportional to the displacement and directed toward the origin (\(a=-\omega^2 r\)).
Let’s differentiate the position vector twice:
Velocity: \(v=\frac{d r}{d t}=-(\hat{i}+2 \hat{j}) A \omega \sin \omega t\)
Acceleration: \(a=\frac{d v}{d t}=-(\hat{i}+2 \hat{j}) A \omega^2 \cos \omega t\)
Substituting \(r\) back in:
\(
a=-\omega^2 r
\)Because it satisfies this fundamental condition, the motion is Simple Harmonic.
Why it is NOT an Ellipse (b)
For the motion to be elliptical, the \(x\) and \(y\) components typically need to be out of phase (e.g., one is a sine and one is a cosine) or have a relationship where the path follows \(\frac{x^2}{a^2}+\frac{y^2}{b^2}=1\). Here, because \(x\) and \(y\) are perfectly in phase, they simply scale together, resulting in a line rather than a curve. - Question 33 of 57
33. Question
A particle moves on the \(X\)-axis according to the equation \(x=x_0 \sin ^2 \omega t\). The motion is simple harmonic
CorrectIncorrectHint
(d) To solve this, we need to rewrite the equation \(x=x_0 \sin ^2 \omega t\) into a standard linear form for Simple Harmonic Motion. We can use the trigonometric identity \(\sin ^2 \theta=\frac{1-\cos 2 \theta}{2}\).
Mathematical Derivation:
Substituting the identity into our equation:
\(
\begin{aligned}
& x=x_0\left(\frac{1-\cos 2 \omega t}{2}\right) \\
& x=\frac{x_0}{2}-\frac{x_0}{2} \cos (2 \omega t)
\end{aligned}
\)
Now, let’s analyze the components of this motion:
1. Mean Position: The term \(\frac{x_0}{2}\) represents a constant offset. The particle does not oscillate about \(x=0\), but rather about the point \(x=\frac{x_0}{2}\).
2. Amplitude: The coefficient of the cosine term is \(\frac{x_0}{2}\). Therefore, the amplitude of the oscillation is \(\frac{x_0}{2}\).
3. Angular Frequency: The term inside the cosine is \((2 \omega) t\). This means the new angular frequency is \(\omega^{\prime}=2 \omega\).
4. Time Period: The time period \(T\) is calculated as:
\(
T=\frac{2 \pi}{\omega^{\prime}}=\frac{2 \pi}{2 \omega}=\frac{\pi}{\omega}
\)
Analysis of the Options
(a) Incorrect: The amplitude is \(\frac{x_0}{2}\), not \(x_0\).
(b) Incorrect: The amplitude is \(\frac{x_0}{2}\), not \(2 x_0\).
(c) Incorrect: The period is halved because of the \(\sin ^2\) function.
(d) Correct: The time period is \(\frac{\pi}{\omega}\). - Question 34 of 57
34. Question
In a simple harmonic motion
CorrectIncorrectHint
The correct statement is (d).
In Simple Harmonic Motion (SHM), energy continuously shuffles back and forth between kinetic (\(K\)) and potential (\(U\)). While their instantaneous values are rarely equal, their averages over a full cycle are perfectly balanced.Analysis of the Statements
(a) & (b) Incorrect: The potential and kinetic energies are only equal at specific points in the oscillation (specifically when the displacement \(x= \pm \frac{A}{\sqrt{2}}\)). At the equilibrium position, \(K\) is maximum and \(U\) is zero; at the extreme positions, \(U\) is maximum and \(K\) is zero.
(c) Incorrect: This statement is too broad. If you pick a very small time interval (for example, just as the particle passes through the equilibrium point), the kinetic energy will be much higher than the potential energy. The averages are only guaranteed to be equal over a full period (or half period).
(d) Correct: Over one full time period (\(T\)), the average value of both kinetic and potential energy is exactly half of the total mechanical energy (\(E\)).
The Mathematical Proof
The total energy in SHM is \(E=\frac{1}{2} k A^2\). Using the time-average integrals over one period:
Average Potential Energy \((\langle U\rangle)\) :
\(
\langle U\rangle=\frac{1}{T} \int_0^T \frac{1}{2} k(A \sin \omega t)^2 d t=\frac{1}{4} k A^2
\)
Average Kinetic Energy \((\langle K\rangle)\) :
\(
\langle K\rangle=\frac{1}{T} \int_0^T \frac{1}{2} m(A \omega \cos \omega t)^2 d t=\frac{1}{4} k A^2
\)
Since both averages equal \(\frac{1}{4} k A^2\), they are equal to each other and each represents exactly \(50 \%\) of the total energy. - Question 35 of 57
35. Question
In a simple harmonic motion
CorrectIncorrectHint
The correct statements are (a) and (b).
In an ideal Simple Harmonic Motion (SHM) where no energy is lost to friction or air resistance, the total mechanical energy of the system remains constant. This leads to a perfect symmetry between the two forms of energy.Maximum \(\mathrm{PE}=\) Maximum KE (a):
Energy is continuously transformed from one type to the other.
At the extreme positions (\(x= \pm A\)), the particle momentarily stops, so kinetic energy is zero and potential energy is at its maximum.
At the mean position (\(x=0\)), the particle moves at its fastest speed, so potential energy is zero and kinetic energy is at its maximum.
Since the total energy (\(E=K+U\)) is conserved, \(U_{\text {max }}\) must equal \(K_{\text {max }}\) (both are equal to \(\frac{1}{2} k A^2\)).Minimum \(\mathrm{PE}=\) Minimum KE (b):
In a standard SHM setup (like a horizontal spring-mass system):
The minimum kinetic energy is zero (at the extreme positions where the velocity is zero).
The minimum potential energy is zero (at the equilibrium/mean position where displacement is zero).
Therefore, \(0=0\), making this statement correct.Why the others are incorrect:
(c) Minimum \(\mathrm{PE}=\) Maximum KE : This is false. Minimum PE is zero, while Maximum KE is the total energy of the system \(\left(\frac{1}{2} k A^2\right)\).
(d) Maximum \(\mathrm{PE}=\) Minimum KE: This is false. Maximum PE is the total energy, while Minimum KE is zero. - Question 36 of 57
36. Question
An object is released from rest. The time it takes to fall through a distance $h$ and the speed of the object as it falls through this distance are measured with a pendulum clock. The entire apparatus is taken on the moon and the experiment is repeated
CorrectIncorrectHint
(a, b)
Step 1: Analyze the “Actual” Fall (Physics)
On the Moon, gravity is weaker ( \(g_{\text {moon }}<g_{\text {earth }}\)). Using the equations of motion for an object starting from rest:
Actual Time: \(t=\sqrt{\frac{2 h}{g}}\). Since \(g\) is in the denominator, a smaller \(g\) results in a larger actual time. The object physically falls slower.
Actual Speed: \(v=\sqrt{2 g h}\). Since \(g\) is in the numerator, a smaller \(g\) results in a smaller actual speed. The object physically hits the ground moving slower.
Step 2: Analyze the “Clock” (Measurement Tool)
The pendulum clock doesn’t know “absolute” time; it only knows its own period \(T\) :
Pendulum Period: \(T=2 \pi \sqrt{\frac{L}{g}}\). On the Moon, the smaller \(g\) makes the period \(T\) larger.
The Result: The clock “slows down.” Each “tick” (which the observer calls one second) actually takes much longer in real-time than it did on Earth.
Step 3: Compare the Ratios (The “Measured” Result)
The “Measured Time” (\(t_{\text {meas }}\)) is the number of clock ticks that occur during the fall. We find this by dividing the actual time of the fall by the duration of one clock tick:
\(
t_{\text {meas }}=\frac{\text { Actual Fall Time }}{\text { Clock Period }}=\frac{\sqrt{2 h / g}}{2 \pi \sqrt{L / g}}
\)
Notice that the \(1 / \sqrt{g}\) terms cancel out completely.
Because the fall slows down at the exact same rate the clock slows down, the clock records the same number of ticks as it did on Earth.
Step 4: Calculate the “Measured” Speed
Measured speed is defined by the observer as the distance (\(h\)) divided by the time recorded on their clock (\(t_{\text {meas }}\)):
\(
\text { Measured Speed }=\frac{h}{t_{\text {meas }}}
\)
Since \(h\) is a constant distance and \(t_{\text {meas }}\) was found to be the same as on Earth (from Step 3), the measured speed remains the same.
Correct Statements Summary:
(a) The measured times are the same (because the clock and the fall are affected by \(g\) identically).
(b) The measured speeds are the same (calculated using the same distance and same measured time). - Question 37 of 57
37. Question
Which of the following will change the time period as they are taken to moon?
CorrectIncorrectHint
The correct answers are (a) and (b).
To determine if the time period (\(T\)) changes on the Moon, we have to look at whether the restoring force of the system depends on gravity (\(g\)). Since \(g\) on the Moon is about \(1 / 6\) th of that on Earth, any system that relies on gravity to “pull it back” to equilibrium will slow down.
Step 1: Simple Pendulum (a) – WILL CHANGE
The time period is given by:
\(
T=2 \pi \sqrt{\frac{L}{g}}
\)
Since \(g\) is in the denominator, the time period is inversely proportional to \(\sqrt{g}\). On the Moon, where \(g\) is smaller, the period \(T\) will increase (the pendulum swings slower).
Step 2: Physical Pendulum (b) – WILL CHANGE
A physical pendulum is any rigid body pivoting about a point. Its time period is:
\(
T=2 \pi \sqrt{\frac{I}{m g d}}
\)
(Where \(I\) is the moment of inertia and \(d\) is the distance to the center of mass). Just like the simple pendulum, the restoring torque is provided by gravity. Therefore, its period will also increase on the Moon.
Step 3: Torsional Pendulum (c) – NO CHANGE
The time period for a torsional pendulum is:
\(
T=2 \pi \sqrt{\frac{I}{C}}
\)Here, \(C\) is the torsional constant of the wire (the “twistiness” of the material). This depends entirely on the material properties of the wire, not on gravity. It will behave exactly the same on Earth, the Moon, or in deep space.
Step 4: Spring-Mass System (d) – NO CHANGE
The time period for a mass on a spring is:
\(
T=2 \pi \sqrt{\frac{m}{k}}
\)
This depends only on the mass (\(m\)) and the spring constant (\(k\)). While the equilibrium position of a vertical spring will shift on the Moon (it won’t stretch as far down), the rate at which it bounces up and down remains identical to its rate on Earth. - Question 38 of 57
38. Question
The resultant force acting on a particle executing simple harmonic motion is 4 N when it is 5 cm away from the centre of oscillation. Find the spring constant.
CorrectIncorrectHint
(a) The simple harmonic motion is defined as
\(
F=-k x .
\)
The spring constant is \(k=\left|\frac{F}{x}\right|\)
\(
=\frac{4 \mathrm{~N}}{5 \mathrm{~cm}}=\frac{4 \mathrm{~N}}{5 \times 10^{-2} \mathrm{~m}}=80 \mathrm{~N} \mathrm{~m}^{-1} .
\) - Question 39 of 57
39. Question
A particle of mass 0.50 kg executes a simple harmonic motion under a force \(F=-\left(50 \mathrm{~N} \mathrm{~m}^{-1}\right) x\). If it crosses the centre of oscillation with a speed of \(10 \mathrm{~m} \mathrm{~s}^{-1}\), the amplitude of the motion is ____.
CorrectIncorrectHint
(d) The kinetic energy of the particle when it is at the centre of oscillation is \(E=\frac{1}{2} m v^2\)
\(
\begin{aligned}
& =\frac{1}{2}(0.50 \mathrm{~kg})\left(10 \mathrm{~m} \mathrm{~s}^{-1}\right)^2 \\
& =25 \mathrm{~J}
\end{aligned}
\)
The potential energy is zero here. At the maximum displacement \(x=A\), the speed is zero and hence the
kinetic energy is zero. The potential energy here is \(\frac{1}{2} k A^2\). As there is no loss of energy,
\(
\frac{1}{2} k A^2=25 \mathrm{~J} \dots(i)
\)
The force on the particle is given by
\(
F=-\left(50 \mathrm{~N} \mathrm{~m}^{-1}\right) x
\)
Thus, the spring constant is \(k=50 \mathrm{~N} \mathrm{~m}^{-1}\).
Equation (i) gives
\(
\frac{1}{2}\left(50 \mathrm{~N} \mathrm{~m}^{-1}\right) A^2=25 \mathrm{~J}
\)
\(
A=1 \mathrm{~m} .
\) - Question 40 of 57
40. Question
A particle of mass 200 g executes a simple harmonic motion. The restoring force is provided by a spring of spring constant \(80 \mathrm{~N} \mathrm{~m}^{-1}\). The time period is ____.
CorrectIncorrectHint
(b) The time period is
\(
T=2 \pi \sqrt{\frac{m}{k}}
\)
\(
\begin{aligned}
& =2 \pi \sqrt{\frac{200 \times 10^{-3} \mathrm{~kg}}{80 \mathrm{~N} \mathrm{~m}^{-1}}} \\
& =2 \pi \times 0.05 \mathrm{~s}=0.31 \mathrm{~s}
\end{aligned}
\) - Question 41 of 57
41. Question
A particle executes simple harmonic motion of amplitude \(A\) along the \(X\)-axis. At \(t=0\), the position of the particle is \(x=A / 2\) and it moves along the positive \(x\)-direction. The phase constant \(\delta\) if the equation is written as \(x=A \sin (\omega t+\delta)\) is ____.
CorrectIncorrectHint
(c) We have \(x=A \sin (\omega t+\delta)\). At \(t=0, x=A / 2\).
Thus, \(\quad A / 2=A \sin \delta\)
or, \(\quad \sin \delta=1 / 2\)
or, \(\quad \delta=\pi / 6\) or \(5 \pi / 6\).
The velocity is \(v=\frac{d x}{d t}=A \omega \cos (\omega t+\delta)\).
At \(\quad t=0, v=A \omega \cos \delta\).
Now, \(\quad \cos \frac{\pi}{6}=\frac{\sqrt{ } 3}{2}\) and \(\cos \frac{5 \pi}{6}=-\frac{\sqrt{ } 3}{2}\).
As \(v\) is positive at \(t=0, \delta\) must be equal to \(\pi / 6\). - Question 42 of 57
42. Question
A particle of mass 40 g executes a simple harmonic motion of amplitude 2.0 cm . If the time period is 0.20 s , the total mechanical energy of the system is ___.
CorrectIncorrectHint
(a)
\(
\begin{aligned}
&\text { The total mechanical energy of the system is }\\
&\begin{aligned}
E & =\frac{1}{2} m \omega^2 A^2 \\
& =\frac{1}{2} m\left(\frac{2 \pi}{T}\right)^2 A^2=\frac{2 \pi^2 m A^2}{T^2} \\
& =\frac{2 \pi^2\left(40 \times 10^{-3} \mathrm{~kg}\right)\left(2.0 \times 10^{-2} \mathrm{~m}\right)^2}{(0.20 \mathrm{~s})^2} \\
& =7.9 \times 10^{-3} \mathrm{~J}
\end{aligned}
\end{aligned}
\) - Question 43 of 57
43. Question
A body makes angular simple harmonic motion of amplitude \(\pi / 10 \mathrm{rad}\) and time period 0.05 s. If the body is at a displacement \(\theta=\pi / 10 \mathrm{rad}\) at \(t=0\), the equation giving the angular displacement as a function of time is ___.
CorrectIncorrectHint
(d) Let the required equation be
\(
\theta=\theta_0 \sin (\omega t+\delta)
\)
Here \(\quad \theta_0=\) amplitude \(=\frac{\pi}{10} \mathrm{rad}\)
\(
\omega=\frac{2 \pi}{T}=\frac{2 \pi}{0.05 \mathrm{~s}}=40 \pi \mathrm{~s}^{-1}
\)
\(
\text { so that } \quad \theta=\left(\frac{\pi}{10} \mathrm{rad}\right) \sin \left[\left(40 \pi \mathrm{~s}^{-1}\right) t+\delta\right] \text {. } \dots(i)
\)
At \(t=0, \theta=\pi / 10 \mathrm{rad}\). Putting in (i),
\(
\frac{\pi}{10}=\left(\frac{\pi}{10}\right) \sin \delta
\)
\(
\begin{aligned}
\sin \delta & =1 \\
\delta & =\pi / 2
\end{aligned}
\)
Thus by (i),
\(
\begin{aligned}
\theta & =\left(\frac{\pi}{10} \mathrm{rad}\right) \sin \left[\left(40 \pi \mathrm{~s}^{-1}\right) t+\frac{\pi}{2}\right] \\
& =\left(\frac{\pi}{10} \mathrm{rad}\right) \cos \left[\left(40 \pi \mathrm{~s}^{-1}\right) t\right]
\end{aligned}
\) - Question 44 of 57
44. Question
The acceleration due to gravity at the place is \(\pi^2 \mathrm{~m} \mathrm{~s}^{-2}\). The time period of a simple pendulum of length one meter is ___.
CorrectIncorrectHint
(b)
\(
\begin{aligned}
&\text { The time period is }\\
&\begin{aligned}
& T=2 \pi \sqrt{l g^{-1}} \\
= & 2 \pi \sqrt{\frac{1 \cdot 00 \mathrm{~m}}{\pi^2 \mathrm{~m} \mathrm{~s}^{-2}}}=2 \cdot 0 \mathrm{~s}
\end{aligned}
\end{aligned}
\) - Question 45 of 57
45. Question
In a laboratory experiment with simple pendulum it was found that it took 36 s to complete 20 oscillations when the effective length was kept at 80 cm . The acceleration due to gravity from these data is ___.
CorrectIncorrectHint
(d) The time period of a simple pendulum is given by
\(
\begin{aligned}
T & =2 \pi \sqrt{l g^{-1}} \\
g & =\frac{4 \pi^2 l}{T^2} \dots(i)
\end{aligned}
\)
In the experiment described in the question, the time period is
\(
T=\frac{36 \mathrm{~s}}{20}=1.8 \mathrm{~s}
\)
Thus, by (i),
\(
g=\frac{4 \pi^2 \times 0.80 \mathrm{~m}}{(1.8 \mathrm{~s})^2}=9.75 \mathrm{~m} \mathrm{~s}^{-2} .
\) - Question 46 of 57
46. Question
A uniform rod of length 1.00 m is suspended through an end and is set into oscillation with small amplitude under gravity. The time period of oscillation is ___.
CorrectIncorrectHint
(c) For small amplitude the angular motion is nearly simple harmonic and the time period is given by
\(
\begin{aligned}
T & =2 \pi \sqrt{\frac{I}{m g l}}=2 \pi \sqrt{\frac{\left(m L^2 / 3\right)}{m g L / 2}} \\
& =2 \pi \sqrt{\frac{2 L}{3 g}}=2 \pi \sqrt{\frac{2 \times 1.00 \mathrm{~m}}{3 \times 9.80 \mathrm{~m} \mathrm{~s}^{-2}}}=1.64 \mathrm{~s}
\end{aligned}
\) - Question 47 of 57
47. Question
A uniform disc of radius 5.0 cm and mass 200 g is fixed at its centre to a metal wire, the other end of which is fixed with a clamp. The hanging disc is rotated about the wire through an angle and is released. If the disc makes torsional oscillations with time period 0.20 s , The torsional constant of the wire is ___.
CorrectIncorrectHint
(a) The situation is shown in figure below. The moment of inertia of the disc about the wire is
\(
\begin{aligned}
I & =\frac{m r^2}{2}=\frac{(0 \cdot 200 \mathrm{~kg})\left(5 \cdot 0 \times 10^{-2} \mathrm{~m}\right)^2}{2} \\
& =2 \cdot 5 \times 10^{-4} \mathrm{~kg}-\mathrm{m}^2 .
\end{aligned}
\)
The time period is given by
\(
\begin{aligned}
T & =2 \pi \sqrt{\frac{I}{k}} \\
k & =\frac{4 \pi^2 I}{T^2} \\
& =\frac{4 \pi^2\left(2.5 \times 10^{-4} \mathrm{~kg}-\mathrm{m}^2\right)}{(0.20 \mathrm{~s})^2} \\
& =0.25 \frac{\mathrm{~kg}-\mathrm{m}^2}{\mathrm{~s}^2} .
\end{aligned}
\) - Question 48 of 57
48. Question
The relation between acceleration and displacement of four particles are given below [NCERT Exemplar]
(a) \(a_x=+2 x\)
(b) \(a_x=+2 x^2\)
(c) \(a_x=-2 x^2\)
(d) \(a_x=-2 x\)
Which one of the particle is exempting simple harmonic motion?CorrectIncorrectHint
(d) To determine which particle is executing Simple Harmonic Motion(SHM), we need to look at the defining physical criteria for this type of movement.
The Condition for SHM
For a particle to undergo Simple Harmonic Motion, the acceleration (\(a\)) must satisfy two specific conditions:
Proportionality: The magnitude of acceleration must be directly proportional to the displacement (\(x\)) from the mean position.
Direction: The acceleration must always be directed opposite to the direction of displacement (pointing toward the equilibrium position).
Mathematically, this is expressed as:
\(
a_x=-\omega^2 x
\)
Where \(\omega\) (angular frequency) is a constant. This means the relationship must be linear and have a negative sign.
Evaluating the Options
(a) \(a_x=+2 x\) : While the acceleration is proportional to \(x\), the positive sign means the acceleration is in the same direction as the displacement. This would cause the particle to accelerate away from the center indefinitely rather than oscillate.
(b) \(a_x=+2 x^2\) : This is a non-linear relationship (quadratic). It does not satisfy the proportionality requirement for SHM.
(c) \(a_x=-2 x^2\) : Although the sign is negative, the acceleration is proportional to the square of the displacement. This represents periodic motion, but not simple harmonic motion.
(d) \(a_x=-2 x\) : This fits the standard SHM equation perfectly. Here, \(\omega^2=2\). The acceleration is proportional to the displacement and acts in the opposite direction.
The correct option is (d). - Question 49 of 57
49. Question
A particle executing SHM has a maximum speed of \(30 \mathrm{~cm} \mathrm{~s}^{-1}\) and a maximum acceleration of \(60 \mathrm{~cm} \mathrm{~s}^{-2}\). The period of oscillation is [NCERT Exemplar]
CorrectIncorrectHint
(a) To find the period of oscillation, we need to use the relationships between maximum velocity (\(\left.v_{\max }\right)\), maximum acceleration \(\left(a_{\max }\right)\), and the angular frequency \((\omega)\).
Identify the Formulas:
For a particle in Simple Harmonic Motion with amplitude \(A\) and angular frequency \(\omega\) :
Maximum Speed: \(v_{\max }=\omega A\)
Maximum Acceleration: \(a_{\text {max }}=\omega^2 A\)
Solve for Angular Frequency (\(\omega\)):
We can isolate \(\omega\) by taking the ratio of the maximum acceleration to the maximum speed:
\(
\frac{a_{\max }}{v_{\max }}=\frac{\omega^2 A}{\omega A}=\omega
\)
Substitute the given values:
\(
\begin{aligned}
\omega & =\frac{60 \mathrm{~cm} \mathrm{~s}^{-2}}{30 \mathrm{~cm} \mathrm{~s}^{-1}} \\
\omega & =2 \mathrm{rad} \mathrm{~s}^{-1}
\end{aligned}
\)
Calculate the Time Period (\(T\)):
The relationship between the time period and angular frequency is:
\(
T=\frac{2 \pi}{\omega}
\)
Substituting our value for \(\omega\) :
\(
T=\frac{2 \pi}{2}
\)
\(
T=\pi \mathrm{s}
\) - Question 50 of 57
50. Question
The motion of a particle is given \(x=a \sin \omega t+b \cos \omega t\). The motion of the particle is [NCERT Exemplar]
CorrectIncorrectHint
(d) To determine the nature of the motion, we need to simplify the given equation into a standard SHM form.
The given equation is:
\(
x=a \sin \omega t+b \cos \omega t
\)
Mathematical Transformation:
We can combine these two trigonometric terms using a common identity. Let’s substitute \(a\) and \(b\) as follows:
Let \(a=R \cos \phi\)
Let \(b=R \sin \phi\)
Squaring and adding these two equations:
\(
\begin{gathered}
a^2+b^2=R^2 \cos ^2 \phi+R^2 \sin ^2 \phi \\
a^2+b^2=R^2\left(\cos ^2 \phi+\sin ^2 \phi\right)
\end{gathered}
\)
Since \(\sin ^2 \phi+\cos ^2 \phi=1\), we get the resultant amplitude \((R)\) :
\(
R=\sqrt{a^2+b^2}
\)
Simplifying the Motion Equation:
Substituting these back into the original equation:
\(
\begin{gathered}
x=(R \cos \phi) \sin \omega t+(R \sin \phi) \cos \omega t \\
x=R(\sin \omega t \cos \phi+\cos \omega t \sin \phi)
\end{gathered}
\)
Using the trigonometric identity \(\sin (A+B)=\sin A \cos B+\cos A \sin B\), we get:
\(
x=R \sin (\omega t+\phi)
\)
Analysis:
The resulting equation \(x=\sqrt{a^2+b^2} \sin (\omega t+\phi)\) is the standard equation for simple Harmonic Motion.
The term \(\sqrt{a^2+b^2}\) represents the amplitude of this motion.
The motion is simple harmonic with amplitude \(\sqrt{a^2+b^2}\). - Question 51 of 57
51. Question
The displacement of a particle is represented by the equation \(y=3 \cos \left(\frac{\pi}{4}-2 \omega t\right)\). The motion of the particle is [NCERT Exemplar]
CorrectIncorrectHint
(b) simple harmonic with period \(\pi / \omega\).
Analysis of the Motion:
To determine the nature of the motion, we look at the standard form of the equation for Simple
Harmonic Motion (SHM):
\(
y=A \cos \left(\omega^{\prime} t+\phi\right)
\)
In your equation, \(y=3 \cos \left(\frac{\pi}{4}-2 \omega t\right)\), we can identify the following components:
Amplitude (\(A\)): 3
Phase \((\phi): \frac{\pi}{4}\)
Angular Frequency \(\left(\omega^{\prime}\right): 2 \omega\) (Note that the negative sign inside the cosine doesn’t change the SHM nature, as \(\cos (-\theta)=\cos (\theta)\)).
Since the displacement follows a single sine or cosine function, the motion is Simple Harmonic.Calculating the Time Period:
The relationship between the time period (\(T\)) and the angular frequency (\(\omega^{\prime}\)) is given by:
\(
T=\frac{2 \pi}{\omega^{\prime}}
\)
Substituting the angular frequency from your equation \(\left(\omega^{\prime}=2 \omega\right)\) :
\(
\begin{aligned}
T & =\frac{2 \pi}{2 \omega} \\
T & =\frac{\pi}{\omega}
\end{aligned}
\) - Question 52 of 57
52. Question
The displacement of a particle is represented by the equation \(y=\sin ^3 \omega t\). The motion is [NCERT Exemplar]
CorrectIncorrectHint
(b) periodic but not simple harmonic.
Why it is Periodic?
A function is periodic if it repeats its value at regular intervals of time. Since \(\sin (\omega t)\) is a periodic function with a period \(T=2 \pi / \omega\), any integer power of that function (like \(\sin ^3 \omega t\)) will also be periodic.
Why it is NOT Simple Harmonic (SHM):
For a motion to be Simple Harmonic, the displacement \(y\) must be expressible as a single sine or cosine function of the form \(y=A \sin (\omega t+\phi)\).
Using the trigonometric identity:
\(
\sin (3 \theta)=3 \sin \theta-4 \sin ^3 \theta
\)
We can rearrange this to express your equation \(y=\sin ^3 \omega t\) as:
\(
y=\frac{1}{4}(3 \sin \omega t-\sin 3 \omega t)
\)
Conclusion:
As you can see from the expanded equation, the motion is a superposition of two different SHMs with different frequencies (\(\omega\) and \(3 \omega\)).
Because it is a sum of periodic functions, the resultant motion is periodic.
Because it cannot be reduced to a single sine or cosine term, it is not simple harmonic.
The period of the motion is determined by the lowest frequency component (the fundamental frequency), which in this case results in a period of \(T=2 \pi / \omega\). - Question 53 of 57
53. Question
Motion of an oscillating liquid column in a U-tube is [NCERT Exemplar]
CorrectIncorrectHint
(c) simple harmonic and time period is independent of the density of the liquid.
Why the Motion is Simple Harmonic (SHM)
When a liquid in a U-tube is displaced from its equilibrium position by a distance \(y\), a restoring force is created by the weight of the unbalanced liquid column.
1. Restoring Force: The difference in height between the two arms becomes \(2 y\). The mass of this extra column is \(m=\) Area × height × density \(=A(2 y) \rho\).
2. Force Equation: The restoring force \(F\) is \(-(m g)\), so \(F=-(2 A y \rho) g\).
3. Acceleration: Since \(F=m a\) (where \(m\) is the total mass of the liquid \(L A \rho\)), the acceleration \(a\) is proportional to \(-y\).
Because the acceleration is directly proportional to the displacement and directed toward the equilibrium position (\(a \propto-y\)), the motion is Simple Harmonic.
The Time Period Formula
The time period \(T\) for an oscillating liquid column of total length \(L\) is given by the formula:
\(
T=2 \pi \sqrt{\frac{L}{2 g}}
\)
Alternatively, if \(h\) is the height of the liquid column in each arm at equilibrium (\(L=2 h\)):
\(
T=2 \pi \sqrt{\frac{h}{g}}
\)
Key Takeaways:
Density (\(\rho\)): You’ll notice that \(\rho\) appears in both the restoring force and the total mass of the liquid. When you divide force by mass to find acceleration, the density terms cancel out. Therefore, the time period is independent of the liquid’s density.
Gravity (\(g\)): The period depends only on the length of the liquid column and the acceleration due to gravity. - Question 54 of 57
54. Question
A particle is acted simultaneously by mutually perpendicular simple harmonic motion \(x=a \cos \omega t\) and \(y=a \sin \omega t\). The trajectory of motion of the particle will be [NCERT Exemplar]
CorrectIncorrectHint
(c) a circle.
Deriving the Trajectory:
To find the trajectory (the path) of the particle, we need to eliminate the time variable (\(t\)) from the two displacement equations to find a direct relationship between \(x\) and \(y\).
Given:
1. \(x=a \cos \omega t \Longrightarrow \frac{x}{a}=\cos \omega t\)
2. \(y=a \sin \omega t \Longrightarrow \frac{y}{a}=\sin \omega t\)
Using the fundamental trigonometric identity \(\sin ^2 \theta+\cos ^2 \theta=1\) :
\(
\begin{gathered}
\left(\frac{x}{a}\right)^2+\left(\frac{y}{a}\right)^2=\cos ^2 \omega t+\sin ^2 \omega t \\
\frac{x^2}{a^2}+\frac{y^2}{a^2}=1
\end{gathered}
\)
Rearranging this gives:
\(
x^2+y^2=a^2
\)
Conclusion: The equation \(x^2+y^2=a^2\) is the standard mathematical equation for a circle with radius \(a\) centered at the origin. - Question 55 of 57
55. Question
The equation of motion of a particle is \(x=a \cos (\alpha t)^2\). The motion is [NCERT Exemplar]
CorrectIncorrectHint
(c) oscillatory but not periodic.
Explanation:
Oscillatory Nature: The equation \(x=a \cos (\alpha t)^2\) contains a cosine function, which represents a repetitive back-and-forth movement between the values \(+a\) and \(-a\). This “to-and-fro” behavior defines the motion as oscillatory.
Non-Periodic Nature: For a motion to be periodic, it must repeat its values at fixed, equal intervals of time (\(T\)) such that \(x(t)=x(t+T)\). In this equation, the argument of the cosine function is \(\alpha^2 t^2\). Because the time variable \(t\) is squared, the duration of each successive cycle decreases as time increases (\(t^2\) increases quadratically). Substituting \(t+T\) into the equation yields \(x(t+T)=a \cos \left[\alpha^2(t+T)^2\right]\), which does not equal \(x(t)\) for any constant \(T\).Why other options are incorrect
(a) periodic but not oscillatory: This is incorrect because the motion is not periodic (the frequency increases over time) and it is oscillatory due to the cosine function.
(b) periodic and oscillatory: While it is oscillatory, it fails the requirement for periodicity because the intervals between repetitions are not equal.
(d) Neither periodic nor oscillatory: This is incorrect because the motion clearly oscillates between fixed spatial limits (\(+a\) and \(-a\)), satisfying the definition of oscillatory motion.Alternate:
As the given equation is
\(
x=a \cos (\alpha t)^2
\)
is a cosine function. Hence, it is an oscillatory motion. Now, putting (\(t+T\)) in place of \(t\),
\(
\begin{aligned}
x(t+T) & =a \cos [\alpha(t+T)]^2 \quad\left[\because x(t)=a \cos (\alpha t)^2\right] \\
& =a \cos \left[\alpha t^2+\alpha T^2+2 \alpha t T\right] \neq x(t)
\end{aligned}
\)
where, \(T\) is supposed as period of the function \(\omega(t)\). Hence, it is not periodic. - Question 56 of 57
56. Question
Four pendulums \(A, B, C\) and \(D\) are suspended from the same elastic support as shown in figure. [NCERT Exemplar]

\(A\) and \(C\) are of the same length, while \(B\) is smaller than \(A\) and \(D\) is larger than \(A\). If \(A\) is given a transverse displacement.
CorrectIncorrectHint
(b) \(C\) will vibrate with maximum amplitude.
This setup demonstrates the phenomenon of Resonance in coupled pendulums.The Physics of Resonance:
When you displace pendulum \(A\), it acts as the driver. It oscillates at its natural frequency and transmits this energy through the common supporting string to pendulums \(B, C\), and \(D\), which act as driven (or forced) oscillators.
1. Natural Frequency: The natural frequency of a simple pendulum depends on its length \(L\) according to the formula:
\(
f=\frac{1}{2 \pi} \sqrt{\frac{g}{L}}
\)
2. Length Matters: Since pendulums \(A\) and \(C\) have the same length, they have the exact same natural frequency.
3. Resonance Condition: Resonance occurs when the frequency of the external driving force (pendulum \(A\) ) matches the natural frequency of the driven system (pendulum \(C\)).
4. Energy Transfer: Because their frequencies match, energy is transferred most efficiently from \(A\) to \(C\), causing \(C\) to vibrate with the maximum amplitude.Why not \(B\) or \(D\) ?
Pendulum \(B\) is shorter, meaning it has a higher natural frequency than \(A\).
Pendulum \(D\) is longer, meaning it has a lower natural frequency than \(A\).
While \(B\) and \(D\) will eventually start to oscillate due to the energy in the string, their amplitudes will remain relatively small because their natural frequencies are “out of sync” with the driver.Alternate: According to the question, \(A\) is given a transverse displacement.

Through the elastic support, the disturbance is transferred to all the pendulums. \(A\) and \(C\) are having same length, hence they will be in resonance, because their time period of oscillation,
\(
T=2 \pi \sqrt{\frac{l}{g}} \text { and hence, frequency will be same. }
\)
So, amplitude of \(C\) will be maximum.
Note In this problem, we have assumed that the support is perfectly elastic and there is no damping. Hence, oscillation is considered as undamped. - Question 57 of 57
57. Question
Figure shows the circular motion of a particle. The radius of the circle, the period, sense of revolution and the initial position are indicated on the figure. The simple harmonic motion of the \(x\)-projection of the radius vector of the rotating particle \(P\) is [NCERT Exemplar]
 CorrectIncorrect
CorrectIncorrectHint
(a) Let angular velocity of the particle executing circular motion is \(\omega\) and when it is at \(Q\), it makes an angle \(\theta\) as shown in the diagram.

Clearly, \(\theta=\omega t\)
Now, we can write \(O R\)
\(
\begin{array}{rlr}
& =O Q \cos \left(90^{\circ}-\theta\right) & \\
& =O Q \sin \theta=O Q \sin \omega t & \\
& =r \sin \omega t & (\because O Q=r) \\
\Rightarrow \quad x & =r \sin \omega t=B \sin \omega t & (\because r=B) \\
& =B \sin \frac{2 \pi}{T} t=B \sin \left(\frac{2 \pi}{30} t\right) &
\end{array}
\)
Clearly, this equation represents SHM.Alternate: Step-by-Step Analysis:
To find the equation of the \(x\)-projection, we need to determine the amplitude, the angular frequency, and the initial phase.
Amplitude (\(A\)):
The radius of the circle is given as \(B\). Therefore, the maximum displacement (amplitude) of the \(x\)-projection is \(B\).
Angular Frequency (\(\omega\)):
The time period \(T\) is given as 30 s. The formula for angular frequency is:
\(
\omega=\frac{2 \pi}{T}=\frac{2 \pi}{30} \mathrm{rad} / \mathrm{s}
\)
Initial Position and Phase \((\phi)\) :
At \(t=0\), the particle \(P\) is at the point \((0, B)\) on the \(y\)-axis.
The \(x\)-projection at \(t=0\) is \(x(0)=0\).
The particle is moving in a clockwise direction (as indicated by the arrow). This means as time increases from zero, the particle moves into the first quadrant where \(x\) values become positive.
Formulating the Equation:
For an \(x\)-projection starting at the origin and moving toward the positive \(x\)-direction, the standard SHM equation is:
\(
x(t)=A \sin (\omega t)
\)
Substituting our values:
\(
x(t)=B \sin \left(\frac{2 \pi}{30} t\right)
\)