3.5 Resolution of vectors
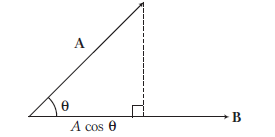
Vector resolution is the process of breaking down a single vector into two or more vectors, called components, that have the same combined effect as the original vector. The most common method is to resolve a vector into its horizontal ( \(x\) ) and vertical (\(y\)) components, which are mutually perpendicular. This simplification is crucial for solving problems in physics and mathematics, such as analyzing forces.
Resolution of vectors into rectangular components
When a vector is splitted into components which are at right angle to each other, then the components are called rectangular or orthogonal components of that vector.
Case-I: We have resolved a two dimensional vector (in \(X Y\)-plane) \(\mathbf{R}\) in mutually perpendicular directions \(x\) and \(y\).
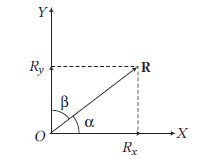
Component along \(X\)-axis \(=R_x=R \cos \alpha\) or \(R \sin \beta\) Component along \(Y\)-axis \(=R_y=R \cos \beta\) or \(R \sin \alpha\) If \(\hat{\mathbf{i}}\) and \(\hat{\mathbf{j}}\) be the unit vectors along \(X\) and \(Y\)-axes respectively, we can write, \(\mathrm{R}=R_x \hat{\mathbf{i}}+R_y \hat{\mathbf{j}}\)
Case-II: Vector \(\mathbf{R}\) has been resolved in two axes such that \(x\) and \(y\) not perpendicular to each other.
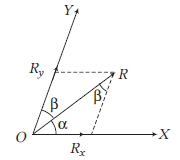
Applying sine law in the triangle shown, we have
\(
\begin{aligned}
& \frac{R}{\sin \left[180^{\circ}-(\alpha+\beta)\right]}=\frac{R_x}{\sin \beta}=\frac{R_y}{\sin \alpha} \\
& R_x=\frac{R \sin \beta}{\sin (\alpha+\beta)} \text { and } R_y=\frac{R \sin \alpha}{\sin (\alpha+\beta)}
\end{aligned}
\)
If \(\alpha+\beta=90^{\circ}, R_x=R \sin \beta\) and \(R_y=R \sin \alpha\)
Also, \(\quad \tan \alpha=\frac{R_y}{R_x}\) or \(\alpha=\tan ^{-1}\left(\frac{R_y}{R_x}\right)\)
Rectangular components of a vector in three dimensional space
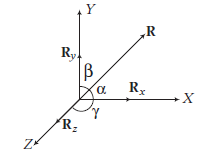
Let \(R_x, R_y\) and \(R_z\) are the components of resultant vector \(R\) in \(X, Y\) and \(Z\)-axes respectively, and \(\hat{\mathbf{i}}, \hat{\mathbf{j}}\) and \(\hat{\mathbf{k}}\) are unit vectors along these directions and \(\alpha, \beta\), and \(\gamma\) are the angles between \(\mathbf{R}\) and the \(x\)-, \(y\)-, and \(z\)-axes, respectively. Then, a vector \(\mathbf{R}\) and its magnitude can be written as
\(
\begin{aligned}
&\begin{array}{r}
\mathbf{R}=\mathbf{R}_x+\mathbf{R}_y+\mathbf{R}_z \\
\text { The position vector } \mathbf{R} \text { can be expressed as } \mathbf{R}=R_x \hat{\mathbf{i}}+R_y \hat{\mathbf{j}}+R_z \hat{\mathbf{k}} \\
\text { The magnitude of vector } \mathbf{R} \text { is } R=\sqrt{R_x^2+R_y^2+R_z^2}
\end{array}\\
&\text { This vector } \mathbf{R} \text { makes an angle of }\\
&\alpha=\cos ^{-1}\left(\frac{R_x}{R}\right) \text { with } X \text {-axis }
\end{aligned}
\)
\(\beta=\cos ^{-1}\left(\frac{R_y}{R}\right)\) with \(Y\)-axis and \(\quad \gamma=\cos ^{-1}\left(\frac{R_z}{R}\right)\) with \(Z\)-axis.
Example 1: A vector is given by \(\mathbf{A}=3 \hat{\mathbf{i}}+4 \hat{\mathbf{j}}+5 \hat{\mathbf{k}}\). Find the magnitude of \(\mathbf{A}\), unit vector along \(\mathbf{A}\) and angles made by A with coordinate axes.
Solution: We have, magnitude, \(|\mathbf{A}|=A=\sqrt{A_x^2+A_y^2+A_z^2}\)
\(
=\sqrt{(3)^2+(4)^2+(5)^2}=5 \sqrt{2}
\)
Unit vector, \(\hat{\mathbf{A}}=\frac{\mathbf{A}}{|\mathbf{A}|}=\frac{3 \hat{\mathbf{i}}+4 \hat{\mathbf{j}}+5 \hat{\mathbf{k}}}{5 \sqrt{2}}\)
Angles made by \(\mathbf{A}\) with coordinate axes,
\(
\begin{aligned}
& \cos \alpha=\frac{A_x}{|\mathbf{A}|}=\frac{3}{5 \sqrt{2}} \Rightarrow \alpha=\cos ^{-1}\left(\frac{3}{5 \sqrt{2}}\right) \\
& \cos \beta=\frac{A_y}{|\mathbf{A}|}=\frac{4}{5 \sqrt{2}} \Rightarrow \beta=\cos ^{-1}\left(\frac{4}{5 \sqrt{2}}\right) \\
& \cos \gamma=\frac{A_z}{|\mathbf{A}|}=\frac{5}{5 \sqrt{2}} \Rightarrow \gamma=\cos ^{-1}\left(\frac{1}{\sqrt{2}}\right)=\frac{\pi}{4}
\end{aligned}
\)
Example 2: Find the magnitude of vectors \(\mathbf{O B}\) and \(\mathbf{O C}\) If sum of three vectors gives a value equals to 0 as shown in figure below.
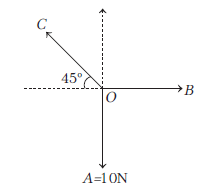
Solution: Consider the figure shown below.
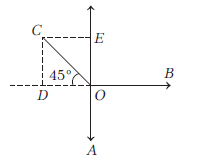
Resolve OC into two rectangular components,
\(
O D=O C \cos 45^{\circ} \text { and } O E=O C \sin 45^{\circ}
\)
To obtain zero resultant,
\(
\begin{aligned}
O E & =O A \text { or } O C \sin 45^{\circ}=10 \mathrm{~N} \\
\Rightarrow \quad O C \times \frac{1}{\sqrt{2}} & =10 \mathrm{~N} \\
\quad|O C| & =10 \sqrt{2} \mathrm{~N} \text { and } O D=O B \\
\Rightarrow \quad O C \cos 45^{\circ} & =O B \\
\Rightarrow \quad \quad O B & =10 \sqrt{2} \times \frac{1}{\sqrt{2}}=10 \mathrm{~N}
\end{aligned}
\)
Thus, the magnitude of \(\mathbf{O B}\) and \(\mathbf{O C}\) is \(10 \sqrt{2} \mathrm{~N}\) and 10 N.
Example 3: Find the resultant and direction of three vectors as shown in the figure.
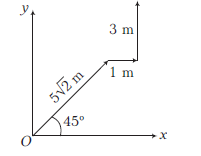
Solution:
From the figure,
On \(X\)-axis, \(x=5 \sqrt{2} \cos 45^{\circ}+1=5+1=6 \mathrm{~m}\)
On \(Y\)-axis, \(y=5 \sqrt{2} \sin 45^{\circ}+3=5+3=8 \mathrm{~m}\)
\(\therefore\) Magnitude of resultant of given vectors,
\(
\begin{aligned}
R & =\sqrt{x^2+y^2} \\
& =\sqrt{(6)^2+(8)^2}=10 \mathrm{~m}
\end{aligned}
\)
\(\therefore\) Direction of resultant vectors,
\(
\begin{array}{rlrl}
& & \tan \theta & =\frac{y}{x}=\frac{8}{6}=\frac{4}{3} \\
\Rightarrow & & \theta=\tan ^{-1}\left(\frac{4}{3}\right)
\end{array}
\)
Thus, resultant vector makes an angle of \(\tan ^{-1}\left(\frac{4}{3}\right)\) with \(X\)-axis.
Example 4: A force of \(10.5 \mathrm{~N}\) acts on a particle along a direction making an angle of \(37^{\circ}\) with the vertical. Find the component of the force in the vertical direction.
Solution: The component of the force in the vertical direction will be
\(
\begin{aligned}
F_{\perp} & =F \cos \theta=(10.5 \mathrm{~N})\left(\cos 37^{\circ}\right) \\
& =(10.5 \mathrm{~N}) \frac{4}{5}=8.40 \mathrm{~N} .
\end{aligned}
\)
Product of Two Vectors
The multiplication of two vector quantities cannot be done by simple algebraic method. The product of two vectors may be a scalar as well as a vector. If the product of two vectors is a scalar quantity, then it is called scalar product (or dot product); if the product is a vector quantity, then it is called vector product (or cross product).
Scalar product (dot product) of two vectors
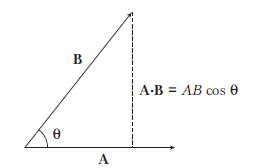
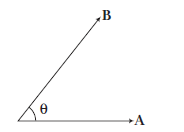
The scalar product (or dot product) of two vectors is defined as the product of their magnitude with cosine of the angle between them.
Thus, if there are two vectors \(\mathbf{A}\) and \(\mathbf{B}\) having angle \(\boldsymbol{\theta}\) between them, then their scalar product is written as
\(
\begin{aligned}
&\mathbf{A} \cdot \mathbf{B}=A B \cos \theta \quad \text { (A scalar quantity) }\\
&\text { e.g. work done }(W)=\mathbf{F} \cdot \mathbf{s} \text { and power }(P)=\mathbf{F} \cdot \mathbf{v}
\end{aligned}
\)
Important points regarding dot product
The following points should be remembered regarding the dot product
- \(\mathbf{A} \cdot \mathbf{B}=\mathbf{B} \cdot \mathbf{A}\) (i.e. dot product is commutative)
- \(\mathbf{A} \cdot(\mathbf{B}+\mathbf{C})=\mathbf{A} \cdot \mathbf{B}+\mathbf{A} \cdot \mathbf{C}(\) i.e. dot product is distributive)
- \(\mathbf{A} \cdot \mathbf{A}=A^2\) (also called self-dot product)
- \(\mathbf{A} \cdot \mathbf{B}=A(B \cos \theta)=A\) (component of \(\mathbf{B}\) along \(\mathbf{A}\) ) or \(\mathbf{A} \cdot \mathbf{B}=B(A \cos \theta)=B\) (component of \(\mathbf{A}\) along \(\mathbf{B}\) )
- \(\hat{\mathbf{i}} \cdot \hat{\mathbf{i}}=\hat{\mathbf{j}} \cdot \hat{\mathbf{j}}=\hat{\mathbf{k}} \cdot \hat{\mathbf{k}}=(1)(1) \cos 0^{\circ}=1\)
- \(\hat{\mathbf{i}} \cdot \hat{\mathbf{j}}=\hat{\mathbf{j}} \cdot \hat{\mathbf{k}}=\hat{\mathbf{i}} \cdot \hat{\mathbf{k}}=(1)(1) \cos 90^{\circ}=0\)
- \(\left(a_1 \hat{\mathbf{i}}+b_1 \hat{\mathbf{j}}+c_1 \hat{\mathbf{k}}\right) \cdot\left(a_2 \hat{\mathbf{i}}+b_2 \hat{\mathbf{j}}+c_2 \hat{\mathbf{k}}\right)\)
\(
=a_1 a_2+b_1 b_2+c_1 c_2
\) - \(\cos \theta=\frac{\mathbf{A} \cdot \mathbf{B}}{A B}\) (cosine of angle between \(\mathbf{A}\) and \(\mathbf{B}\) )
- Two vectors are perpendicular (i.e. \(\theta=90^{\circ}\) ), if their dot product is zero.
- Dot product of two vectors will be maximum when vectors are parallel (i.e. \(\theta=0)(\mathbf{A} \cdot \mathbf{B})_{\text {max }}=A B\)
Note
- The scalar or dot product of two vectors \(\boldsymbol{A}\) and \(\boldsymbol{B}\) is denoted by \(\boldsymbol{A} \cdot \boldsymbol{B}\) and is read as \(\boldsymbol{A} \operatorname{dot} \boldsymbol{B}\).
- Dot product is always a scalar, which is positive, if angle between the vectors is acute (i.e. \(\theta<90^{\circ}\) ) and negative, if angle between them is obtuse (i.e. \(90^{\circ}<\theta<180^{\circ}\) ).
Example 5: The work done by a force \(\vec{F}\) during a displacement \(\vec{r}\) is given by \(\vec{F} \cdot \vec{r}\). Suppose a force of \(12 \mathrm{~N}\) acts on a particle in the vertically upward direction and the particle is displaced through \(2.0 \mathrm{~m}\) in the vertically downward direction. Find the work done by the force during this displacement.
Solution: The angle between the force \(\vec{F}\) and the displacement \(\vec{r}\) is \(180^{\circ}\). Thus, the work done is
\(
\begin{aligned}
W & =\vec{F} \cdot \vec{r} \\
& =F r \cos \theta \\
& =(12 \mathrm{~N})\left(2^{\cdot} 0 \mathrm{~m}\right)\left(\cos 180^{\circ}\right) \\
& =-24 \mathrm{~N}-\mathrm{m}=-24 \mathrm{~J} .
\end{aligned}
\)
Projection of \(\mathbf{A}\) along \(\mathbf{B}\) (Components of dot product)
Case-I: In scalar form : Projection or scalar component of \(\mathbf{A}\) along \(\mathbf{B}\)
\(
=A \cos \theta=A \times \frac{\mathbf{A} \cdot \mathbf{B}}{A B}=\frac{\mathbf{A} \cdot \mathbf{B}}{B}=\mathbf{A} \cdot \hat{\mathbf{B}}
\)
Case-II: In vector form : Projection or vector component of A along B
\(
\begin{aligned}
& =(A \cos \theta) \hat{\mathbf{B}}=\left(A \times \frac{\mathbf{A} \cdot \mathbf{B}}{A B}\right) \hat{\mathbf{B}} \\
& =\frac{\mathbf{A} \cdot \mathbf{B}}{B} \cdot \hat{\mathbf{B}}=(\mathbf{A} \cdot \hat{\mathbf{B}}) \hat{\mathbf{B}}
\end{aligned}
\)
Example 6: Find the projection of \(\mathbf{A}=2 \hat{\mathbf{i}}-\hat{\mathbf{j}}+\hat{\mathbf{k}}\) on
\(
\mathbf{B}=\hat{\mathbf{i}}-2 \hat{\mathbf{j}}+\hat{\mathbf{k}} .
\)
Solution: Projection of \(\mathbf{A}\) on \(\mathbf{B}=A \cos \theta\) (where, \(\theta=\) angle between \(\mathbf{A}\) and \(\mathbf{B}\) )
\(
\begin{aligned}
& =\frac{\mathbf{A} \cdot \mathbf{B}}{B}=(2 \hat{\mathbf{i}}-\hat{\mathbf{j}}+\hat{\mathbf{k}}) \cdot \frac{(\hat{\mathbf{i}}-2 \hat{\mathbf{j}}+\hat{\mathbf{k}})}{\sqrt{(1)^2+(-2)^2+(1)^2}} \\
& =\frac{2+2+1}{\sqrt{6}}=\frac{5}{\sqrt{6}}
\end{aligned}
\)
Example 7: Prove that the vectors \(\mathbf{A}=2 \hat{\mathbf{i}}-3 \hat{\mathbf{j}}+\hat{\mathbf{k}}\) and \(\mathbf{B}=\hat{\mathbf{i}}+\hat{\mathbf{j}}+\hat{\mathbf{k}}\) are mutually perpendicular.
Solution:
\(
\begin{aligned}
\mathbf{A} \cdot \mathbf{B} & =(2 \hat{\mathbf{i}}-3 \hat{\mathbf{j}}+\hat{\mathbf{k}}) \cdot(\hat{\mathbf{i}}+\hat{\mathbf{j}}+\hat{\mathbf{k}}) \\
& =(2)(1)+(-3)(1)+(1)(1) \\
& =0=A B \cos \theta \quad(\because \mathbf{A} \cdot \mathbf{B}=A B \cos \theta)
\end{aligned}
\)
\(
\begin{aligned}
\therefore & \cos \theta & =0 & (\text { As } A \neq 0, B \neq 0) \\
\text { or } & \quad \theta & =90^{\circ} & \left(\because \cos 90^{\circ}=0\right)
\end{aligned}
\)
or the vectors \(\mathbf{A}\) and \(\mathbf{B}\) are mutually perpendicular.
Example 8: Find the angle between two vectors
\(
\mathbf{A}=2 \hat{\mathbf{i}}+\hat{\mathbf{j}}-\hat{\mathbf{k}} \text { and } \mathbf{B}=\hat{\mathbf{i}}-\hat{\mathbf{k}} .
\)
Solution:
\(
\begin{aligned}
A & =|\mathbf{A}|=\sqrt{(2)^2+(1)^2+(-1)^2}=\sqrt{6} \\
B & =|\mathbf{B}|=\sqrt{(1)^2+(-1)^2}=\sqrt{2} \\
\mathbf{A} \cdot \mathbf{B} & =(2 \hat{\mathbf{i}}+\hat{\mathbf{j}}-\hat{\mathbf{k}}) \cdot(\hat{\mathbf{i}}-\hat{\mathbf{k}})=(2)(1)+(-1)(-1)=3
\end{aligned}
\)
Now, \(\cos \theta=\frac{\mathbf{A} \cdot \mathbf{B}}{A B}=\frac{3}{\sqrt{6} \cdot \sqrt{2}}=\frac{3}{\sqrt{12}}=\frac{\sqrt{3}}{2}\)
\(
\therefore \quad \theta=30^{\circ}
\)
Example 9: Find the component of vector \(\mathbf{A}+\mathbf{B}\) along
(i) \(X\)-axis
(ii) and C.
Given, \(\mathbf{A}=\hat{\mathbf{i}}-2 \hat{\mathbf{j}}, \mathbf{B}=2 \hat{\mathbf{i}}+3 \hat{\mathbf{k}}\) and \(\mathbf{C}=\hat{\mathbf{i}}+\hat{\mathbf{j}}\).
Solution: \(\mathbf{A}+\mathbf{B}=(\hat{\mathbf{i}}-2 \hat{\mathbf{j}})+(2 \hat{\mathbf{i}}+3 \hat{\mathbf{k}})=3 \hat{\mathbf{i}}-2 \hat{\mathbf{j}}+3 \hat{\mathbf{k}}\)
(i) Component of \(\mathbf{A}+\mathbf{B}\) along \(X\)-axis is 3.
(ii) Component of \(\mathbf{A}+\mathbf{B}=\mathbf{R}\) (say) along \(\mathbf{C}\) is
\(
\begin{aligned}
\mathbf{R} \cdot \mathbf{C} & =R C \cos \theta \\
\therefore \quad R \cos \theta & =\frac{\mathbf{R} \cdot \mathbf{C}}{C}=\frac{(3 \hat{\mathbf{i}}-2 \hat{\mathbf{j}}+3 \hat{\mathbf{k}}) \cdot(\hat{\mathbf{i}}+\hat{\mathbf{j}})}{\sqrt{(1)^2+(1)^2}}=\frac{3-2}{\sqrt{2}}=\frac{1}{\sqrt{2}}
\end{aligned}
\)
Example 10: Find the (i) scalar component and (ii) vector component of \(\mathbf{A}=3 \hat{\mathbf{i}}+4 \hat{\mathbf{j}}+5 \hat{\mathbf{k}}\) on \(\mathbf{B}=\hat{\mathbf{i}}+\hat{\mathbf{j}}+\hat{\mathbf{k}}\).
Solution: (i) Scalar component of \(\mathbf{A}\) along \(\mathbf{B}\) is
\(
\begin{aligned}
A \cos \theta & =\mathbf{A} \cdot \hat{\mathbf{B}}=(3 \hat{\mathbf{i}}+4 \hat{\mathbf{j}}+5 \hat{\mathbf{k}}) \cdot \frac{(\hat{\mathbf{i}}+\hat{\mathbf{j}}+\hat{\mathbf{k}})}{\sqrt{3}} \\
& =\frac{3+4+5}{\sqrt{3}}=\frac{12}{\sqrt{3}}=4 \sqrt{3}
\end{aligned}
\)
(ii) Vector component of \(\mathbf{A}\) along \(\mathbf{B}\) is
\(
(A \cos \theta) \hat{\mathbf{B}}=(\mathbf{A} \cdot \hat{\mathbf{B}}) \hat{\mathbf{B}}=(4 \sqrt{3}) \frac{(\hat{\mathbf{i}}+\hat{\mathbf{j}}+\hat{\mathbf{k}})}{\sqrt{3}}=4 \hat{\mathbf{i}}+4 \hat{\mathbf{j}}+4 \hat{\mathbf{k}}
\)
Vector product of two vectors (Cross Product of two Vectors)
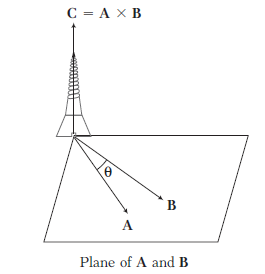
The vector product or cross product of two vectors is defined as a vector having magnitude equal to the product of their magnitudes with the sine of angle between them, and its direction is perpendicular to the plane containing both the vectors according to right hand screw rule.
Thus, if \(\mathbf{A}\) and \(\mathbf{B}\) are two vectors, then their vector product, i.e. \(\mathbf{A} \times \mathbf{B}\) gives a vector \(\mathbf{C}\) and is defined by \(\mathbf{C}=\mathbf{A} \times \mathbf{B}=A B \sin \boldsymbol{\theta} \hat{\mathbf{n}}\).
where, \(\hat{\mathbf{n}}\) is a unit vector perpendicular to the plane of \(\mathbf{A}\) and \(\mathbf{B}\).
The direction of \(\mathbf{C}\) (or of \(\hat{\mathbf{n}}\) ) is determined by right hand screw rule and right hand thumb rule.
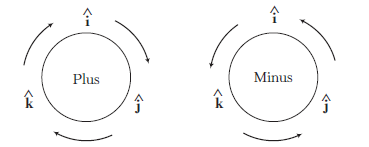
Right Hand Screw Rule
Rotate a right handed screw from first vector (\((\mathbf{A})\)) towards second vector (\((\mathbf{B})\)). The direction in which right handed screw moves gives the direction of vector \((\mathbf{C})\) as shown in Figure below.
The direction of \(\mathbf{C}\) (or of \(\hat{\mathbf{n}}\) ) is perpendicular to the plane containing \(\mathbf{A}\) and \(\mathbf{B}\); and its sense is decided by right hand screw rule.
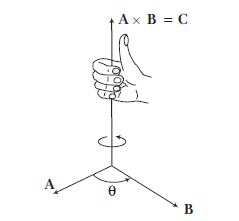
Right Hand Thumb Rule
If the fingers of the right hand be curled in the direction in which vector \(\mathbf{A}\) must be turned through the smaller included angle \(\theta\) to coincide with the direction of vector \(\mathbf{B}\), the thumb points in the direction of \(\mathbf{C}\) as shown in Figure below.
Important points regarding vector product
- \(\mathbf{A} \times \mathbf{B}=-\mathbf{B} \times \mathbf{A}\)
- The magnitude of cross product of two parallel vectors is zero, as \(|\mathbf{A} \times \mathbf{B}|=A B \sin \theta\) and \(\theta=0^{\circ}\) for two parallel vectors. Thus,
\(
\hat{\mathbf{i}} \times \hat{\mathbf{i}}=\hat{\mathbf{j}} \times \hat{\mathbf{j}}=\hat{\mathbf{k}} \times \hat{\mathbf{k}}=0
\) - If two vectors are perpendicular to each other, we have \(\boldsymbol{\theta}=90^{\circ}\), i.e. \(\sin \boldsymbol{\theta}=1\). So that, \(\mathbf{A} \times \mathbf{B}=A B \hat{\mathbf{n}}\). These vectors \(\mathbf{A}, \mathbf{B}\) and \(\mathbf{A} \times \mathbf{B}\) thus form a right handed system of mutually perpendicular vectors.
It follows at once from the above that in case of the orthogonal triad of unit vectors \(\hat{\mathbf{i}}, \hat{\mathbf{j}}\) and \(\hat{\mathbf{k}}\) (each perpendicular to each other)
\(
\begin{aligned}
& \hat{\mathbf{i}} \times \hat{\mathbf{j}}=-\hat{\mathbf{j}} \times \hat{\mathbf{i}}=\hat{\mathbf{k}} \\
& \hat{\mathbf{j}} \times \hat{\mathbf{k}}=-\hat{\mathbf{k}} \times \hat{\mathbf{j}}=\hat{\mathbf{i}} \\
& \hat{\mathbf{k}} \times \hat{\mathbf{i}}=-\hat{\mathbf{i}} \times \hat{\mathbf{k}}=\hat{\mathbf{j}}
\end{aligned}
\)
- \(\mathbf{A} \times(\mathbf{B}+\mathbf{C})=\mathbf{A} \times \mathbf{B}+\mathbf{A} \times \mathbf{C}\)
- A vector product can be expressed in terms of rectangular components of the two vectors and put in the determinant form as may be seen from the following
Let \(\mathbf{A}=a_1 \hat{\mathbf{i}}+b_1 \hat{\mathbf{j}}+c_1 \hat{\mathbf{k}}\)
and \(\mathbf{B}=a_2 \hat{\mathbf{i}}+b_2 \hat{\mathbf{j}}+c_2 \hat{\mathbf{k}}\)
Putting it in determinant form, we have
\(
\mathbf{A} \times \mathbf{B}=\left|\begin{array}{ccc}
\hat{\mathbf{i}} & \hat{\mathbf{j}} & \hat{\mathbf{k}} \\
a_1 & b_1 & c_1 \\
a_2 & b_2 & c_2
\end{array}\right|
\)
It may be noted that the scalar components of the first vector \(\mathbf{A}\) occupy the middle row of the determinant. - A unit vector ( \(\hat{\mathbf{n}}\) ) perpendicular to \(\mathbf{A}\) as well as \(\mathbf{B}\) is given by \(\hat{\mathbf{n}}=\frac{\mathbf{A} \times \mathbf{B}}{|\mathbf{A} \times \mathbf{B}|}\)
- If \(\mathbf{A}, \mathbf{B}\) and \(\mathbf{C}\) are coplanar, then \([\mathbf{A} \cdot(\mathbf{B} \times \mathbf{C})]=0\)
- Angle between \((\mathbf{A}+\mathbf{B})\) and \((\mathbf{A} \times \mathbf{B})\) is \(90^{\circ}\).
- Two vectors can be shown parallel to each other, if
The coefficient of \(\hat{\mathbf{i}}, \hat{\mathbf{j}}\) and \(\hat{\mathbf{k}}\) of both the vectors bear a constant ratio. For example, a vector \(\mathbf{A}=a_1 \hat{\mathbf{i}}+b_1 \hat{\mathbf{j}}+c_1 \hat{\mathbf{k}}\) is parallel to another vector \(\mathbf{B}=a_2 \hat{\mathbf{i}}+b_2 \hat{\mathbf{j}}+c_2 \hat{\mathbf{k}}\), if
\(
\frac{a_1}{a_2}=\frac{b_1}{b_2}=\frac{c_1}{c_2}
\)
The cross product of both the vectors is zero. For instance \(\mathbf{A}\) and \(\mathbf{B}\) are parallel to each other, if
\(
\mathbf{A} \times \mathbf{B}=\left|\begin{array}{ccc}
\hat{\mathbf{i}} & \hat{\mathbf{j}} & \hat{\mathbf{k}} \\
a_1 & b_1 & c_1 \\
a_2 & b_2 & c_2
\end{array}\right|=0
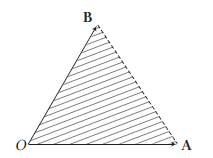
\) - The area of triangle bounded by vectors \(\mathbf{A}\) and \(\mathbf{B}\) is \(\frac{1}{2}|\mathbf{A} \times \mathbf{B}|\).
Area of triangle \(A B C\) If position vector of \(A\) is a, position vector of \(B\) is \(\mathbf{b}\) and position vector of \(C\) is \(\mathbf{c}\), then
Area of triangle \(A B C=\frac{1}{2}|\mathbf{a} \times \mathbf{b}+\mathbf{b} \times \mathbf{c}+\mathbf{c} \times \mathbf{a}|\)
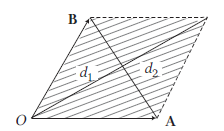
- Area of parallelogram shown in figure is
\(
\begin{aligned}
&=|\mathbf{A} \times \mathbf{B}|=\frac{1}{2}\left|d_1 \times d_2\right|\\
&\text { where, } d_1 \text { and } d_2 \text { are diagonals. }
\end{aligned}
\)
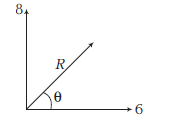
Example 11: The vector \(\vec{A}\) has a magnitude of 5 units, \(\vec{B}\) has a magnitude of 6 units, and the cross product of \(\vec{A}\) and \(\vec{B}\) has a magnitude of 15 unit. Find the angle between \(\vec{A}\) and \(\vec{B}\).
Solution: If the angle between \(\vec{A}\) and \(\vec{B}\) is \(\theta\), the cross product will have a magnitude
\(
|\vec{A} \times \vec{B}|=A B \sin \theta
\)
\(
15=5 \times 6 \sin \theta
\)
\(
\sin \theta=\frac{1}{2} \text {. }
\)
Thus, \(\theta=30^{\circ} \text { or, } 150^{\circ}.\)
Example 12: Show that the vector \(\mathbf{A}=\hat{\mathbf{i}}-\hat{\mathbf{j}}+2 \hat{\mathbf{k}}\) is parallel to a vector \(\mathbf{B}=3 \hat{\mathbf{i}}-3 \hat{\mathbf{j}}+6 \hat{\mathbf{k}}\).
Solution: A vector \(\mathbf{A}\) is parallel to an another vector \(\mathbf{B}\), if it can be written as
\(
\mathbf{A}=m \mathbf{B}
\)
Here,
\(
A=(\hat{\mathbf{i}}-\hat{\mathbf{j}}+2 \hat{\mathbf{k}})=\frac{1}{3}(3 \hat{\mathbf{i}}-3 \hat{\mathbf{j}}+6 \hat{\mathbf{k}})
\)
\(
(\because \mathbf{B}=3 \hat{\mathbf{i}}-3 \hat{\mathbf{j}}+6 \hat{\mathbf{k}})
\)13
\(
\therefore \quad \mathbf{A}=\frac{1}{3} \mathbf{B}
\)
This implies that \(\mathbf{A}\) is parallel to \(\mathbf{B}\) and magnitude of \(\mathbf{A}\) is \(1 / 3\) times the magnitude of \(\mathbf{B}\).
Example 13: Find a unit vector perpendicular to \(\mathbf{A}=2 \hat{\mathbf{i}}+3 \hat{\mathbf{j}}+\hat{\mathbf{k}}\) and \(\mathbf{B}=\hat{\mathbf{i}}-\hat{\mathbf{j}}+\hat{\mathbf{k}}\) both.
Solution: Given, \(\mathbf{A}=2 \hat{\mathbf{i}}+3 \hat{\mathbf{j}}+\hat{\mathbf{k}}\) and \(\mathbf{B}=\hat{\mathbf{i}}-\hat{\mathbf{j}}+\hat{\mathbf{k}}\)
Now, \(\mathbf{C}=\mathbf{A} \times \mathbf{B}\) is a vector, perpendicular to both \(\mathbf{A}\) and \(\mathbf{B}\).
Hence, a unit vector \(\hat{\mathbf{n}}\) is perpendicular to both \(\mathbf{A}\) and \(\mathbf{B}\). It can be written as
\(
\hat{\mathbf{n}}=\frac{\mathbf{C}}{C}=\frac{\mathbf{A} \times \mathbf{B}}{|\mathbf{A} \times \mathbf{B}|}
\)
Here,
\(
\begin{aligned}
\mathbf{A} \times \mathbf{B} & =\left|\begin{array}{ccc}
\hat{\mathbf{i}} & \hat{\mathbf{j}} & \hat{\mathbf{k}} \\
2 & 3 & 1 \\
1 & -1 & 1
\end{array}\right| \\
& =\hat{\mathbf{i}}(3+1)+\hat{\mathbf{j}}(1-2)+\hat{\mathbf{k}}(-2-3) \\
& =4 \hat{\mathbf{i}}-\hat{\mathbf{j}}-5 \hat{\mathbf{k}}
\end{aligned}
\)
Further, \(|\mathbf{A} \times \mathbf{B}|=\sqrt{(4)^2+(-1)^2+(-5)^2}=\sqrt{42}\)
\(\therefore\) The desired unit vector is \(\hat{\mathbf{n}}=\frac{\mathbf{A} \times \mathbf{B}}{|\mathbf{A} \times \mathbf{B}|}\)
\(
\hat{\mathbf{n}}=\frac{1}{\sqrt{42}}(4 \hat{\mathbf{i}}-\hat{\mathbf{j}}-5 \hat{\mathbf{k}})
\)
Example 14: Let \(\mathbf{A}\), \(\mathbf{B}\) and \(\mathbf{C}\) be unit vectors. Suppose that \(\mathbf{A} \cdot \mathbf{B}=\mathbf{A} \cdot \mathbf{C}=0\) and that the angle between \(\mathbf{B}\) and \(\mathbf{C}\) is \(\pi / 6\), then prove that, \(\mathbf{A}= \pm 2(\mathbf{B} \times \mathbf{C})\)
Solution: Since, \(\mathbf{A} \cdot \mathbf{B}=0, \quad \mathbf{A} \cdot \mathbf{C}=0\)
Hence,
\(
(\mathbf{B}+\mathbf{C}) \cdot \mathbf{A}=0
\)
So, \(\mathbf{A}\) is perpendicular to \((\mathbf{B}+\mathbf{C})\) and \(\mathbf{A}\) is a unit vector perpendicular to the plane of vectors \(\mathbf{B}\) and \(\mathbf{C}\).
\(
\mathbf{A}=\frac{\mathbf{B} \times \mathbf{c}}{|\mathbf{B} \times \mathbf{C}|}
\)
\(
\begin{aligned}
&\text { where, }\\
&\begin{aligned}
|\mathbf{B} \times \mathbf{C}| & =|\mathbf{B}||\mathbf{C}| \sin \theta \left(\because \theta=\frac{\pi}{6}\right) \\
& =|\mathbf{B}||\mathbf{C}| \sin \frac{\pi}{6}
\end{aligned}
\end{aligned}
\)
\(
\begin{gathered}
=1 \times 1 \times \frac{1}{2}=\frac{1}{2} \\
\mathbf{A}=\frac{\mathbf{B} \times \mathbf{C}}{|\mathbf{B} \times \mathbf{C}|}= \pm 2(\mathbf{B} \times \mathbf{C})
\end{gathered}
\)
Example 15: If \(\mathbf{a}=3 \hat{\mathbf{i}}+\hat{\mathbf{j}}-4 \hat{\mathbf{k}}, \mathbf{b}=6 \hat{\mathbf{i}}+5 \hat{\mathbf{j}}-2 \hat{\mathbf{k}}\), then find the area of a triangle whose adjacent sides are determined by \(\mathbf{a}\) and \(\mathbf{b}\).
Solution: Cross product of vectors \(\mathbf{a}\) and \(\mathbf{b}\),
\(
\begin{aligned}
& \mathbf{a} \times \mathbf{b}=\left|\begin{array}{ccc}
\hat{\mathbf{i}} & \hat{\mathbf{j}} & \hat{\mathbf{k}} \\
3 & 1 & -4 \\
6 & 5 & -2
\end{array}\right| \\
= & \hat{\mathbf{i}}(-2+20)-\hat{\mathbf{j}}(-6+24)+\hat{\mathbf{k}}(15-6)=18 \hat{\mathbf{i}}-18 \hat{\mathbf{j}}+9 \hat{\mathbf{k}}
\end{aligned}
\)
Magnitude of \(\mathbf{a}\) and \(\mathbf{b}\),
\(
\begin{gathered}
|\mathbf{a} \times \mathbf{b}|=\sqrt{(18)^2+(-18)^2+(9)^2}=\sqrt{729}=27 \\
\therefore \text { Area of } \Delta=\frac{1}{2}|\mathbf{a} \times \mathbf{b}|=\frac{27}{2} \\
=13.5 \text { sq. units }
\end{gathered}
\)
Example 16: If the diagonals of a parallelogram are \(2 \hat{\mathbf{i}}\) and \(2 \hat{\mathbf{j}}\), then find its area.
Solution: Let \(\mathbf{A}=2 \hat{\mathbf{i}}\) and \(\mathbf{B}=2 \hat{\mathbf{j}}\)
\(
\begin{aligned}
\text { Area of parallelogram } & =\frac{1}{2}|\mathbf{A} \times \mathbf{B}|=\frac{1}{2}[2 \hat{\mathbf{i}} \times 2 \hat{\mathbf{j}}] \\
& \left.=\frac{1}{2}[4 \hat{\mathbf{i}} \times \hat{\mathbf{j}})\right]=\frac{1}{2}|4 \hat{\mathbf{k}}| \quad(\because \hat{\mathbf{i}} \times \hat{\mathbf{j}}=\hat{\mathbf{k}}) \\
& =2 \text { sq. units }
\end{aligned}
\)
Example 17: The adjacent sides of a parallelogram is given by two vectors \(\mathbf{A}\) and \(\mathbf{B}\), where \(\mathbf{A}=5 \hat{\mathbf{i}}-4 \hat{\mathbf{j}}+3 \hat{\mathbf{k}}\) and \(\mathbf{B}=3 \hat{\mathbf{i}}-2 \hat{\mathbf{j}}-\hat{\mathbf{k}}\). Calculate the area of parallelogram.
Solution: Here, \(\mathbf{A}\) and \(\mathbf{B}\) represents the adjacent sides of a parallelogram.
\(
\begin{aligned}
\mathbf{A} & =5 \hat{\mathbf{i}}-4 \hat{\mathbf{j}}+3 \hat{\mathbf{k}} \\
\mathbf{B} & =3 \hat{\mathbf{i}}-2 \hat{\mathbf{j}}-\hat{\mathbf{k}} \\
\text { Area of parallelogram } & =|\mathbf{A} \times \mathbf{B}|
\end{aligned}
\)
\(
\begin{aligned}
\mathbf{A} \times \mathbf{B} & =\left|\begin{array}{ccc}
\hat{\mathbf{i}} & \hat{\mathbf{j}} & \hat{\mathbf{k}} \\
5 & -4 & 3 \\
3 & -2 & -1
\end{array}\right| \\
& =\hat{\mathbf{i}}(4+6)-\hat{\mathbf{j}}(-5-9)+\hat{\mathbf{k}}(-10+12) \\
& =10 \hat{\mathbf{i}}+14 \hat{\mathbf{j}}+2 \hat{\mathbf{k}}
\end{aligned}
\)
\(
\begin{aligned}
|\mathbf{A} \times \mathbf{B}| & =\sqrt{(10)^2+(14)^2+(2)^2} \\
& =\sqrt{300}=10 \sqrt{3} \text { sq. units }
\end{aligned}
\)
Velocity vector
Velocity of an object in motion is defined as the ratio of displacement and the corresponding time interval taken by the object, i.e.
\(
\text { Velocity }=\frac{\text { Displacement }}{\text { Time interval }}
\)
Velocity is a vector quantity as it has both the magnitude (speed) and direction.
It is of two types
(i) Average velocity
(ii) Instantaneous velocity
Average velocity
It is defined as the ratio of the displacement and the corresponding time interval.
Thus, average velocity \(=\frac{\text { displacement }}{\text { time taken }}\)
Average velocity, \(\mathbf{v}_{\text {av }}=\frac{\Delta \mathbf{r}}{\Delta t}=\frac{\mathbf{r}_2-\mathbf{r}_1}{t_2-t_1}\)
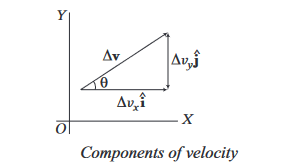
Velocity can be expressed in the component form as
\(
\mathbf{v}_{\mathrm{av}}=\frac{\Delta x}{\Delta t} \hat{\mathbf{i}}+\frac{\Delta y}{\Delta t} \hat{\mathbf{j}}=\Delta v_x \hat{\mathbf{i}}+\Delta v_y \hat{\mathbf{j}}
\)
where, \(\Delta v_x\) and \(\Delta v_y\) are the components of average velocity along \(x\)-direction and \(y\)-direction, respectively. The magnitude of \(\mathbf{v}_{\mathrm{av}}\) is given by
\(
v_{\mathrm{av}}=\sqrt{\Delta v_x^2+\Delta v_y^2}
\)
and the direction of \(\mathbf{v}_{\text {av }}\) is given by angle \(\theta\)
\(
\tan \theta=\frac{\Delta v_y}{\Delta v_x} \text { (From } X \text {-axis) }
\)
Example 18: A particle moves in XY-plane from position \((1 \mathrm{~m}, 2 \mathrm{~m})\) to \((3 \mathrm{~m}, 4 \mathrm{~m})\) in \(2 \mathrm{~s}\). Find the magnitude and direction of average velocity.
Solution: Given, position vectors of the particle are
\(
\begin{aligned}
\mathbf{r}_1 & =x_1 \hat{\mathbf{i}}+y_1 \hat{\mathbf{j}}=\hat{\mathbf{i}}+2 \hat{\mathbf{j}} \\
\mathbf{r}_2 & =x_2 \hat{\mathbf{i}}+y_2 \hat{\mathbf{j}}=3 \hat{\mathbf{i}}+4 \hat{\mathbf{j}}
\end{aligned}
\)
Displacement, \(\Delta \mathbf{r}=\mathbf{r}_2-\mathbf{r}_1=2 \hat{\mathbf{i}}+2 \hat{\mathbf{j}}\)
\(\therefore\) Average velocity, \(\mathbf{v}_{\mathrm{av}}=\frac{\Delta \mathbf{r}}{\Delta t}\)
\(
\Rightarrow \quad \mathbf{v}_{\text {av }}=\frac{2 \hat{\mathbf{i}}+2 \hat{\mathbf{j}}}{2}
\)
\(
\Rightarrow \quad \mathbf{v}_{\mathrm{av}}=\Delta v_x \hat{\mathbf{i}}+\Delta v_y \hat{\mathbf{j}}=(\hat{\mathbf{i}}+\hat{\mathbf{j}}) \mathrm{ms}^{-1}
\)
\(\Rightarrow \quad\left|\mathbf{v}_{\mathrm{av}}\right|=\sqrt{(1)^2+(1)^2}=\sqrt{2} \mathrm{~ms}^{-1}\)
Direction of average velocity with \(X\)-axis,
\(
\theta=\tan ^{-1}\left(\frac{\Delta v_y}{\Delta v_x}\right)=\tan ^{-1}\left(\frac{1}{1}\right)=45^{\circ}
\)
Instantaneous velocity
The velocity of the object at an instant of time \((t)\) is known as instantaneous velocity. The average velocity will become instantaneous, if \(\Delta t\) approaches to zero.
\(\therefore\) Instantaneous velocity,
\(
\mathbf{v}=\lim _{\Delta t \rightarrow 0} \frac{\Delta \mathbf{r}}{\Delta t}=\frac{d \mathbf{r}}{d t}
\)
Now, we can write
\(
\begin{array}{l}
d \mathbf{r}=d x \hat{\mathbf{i}}+d y \hat{\mathbf{j}} \\
\therefore \quad \mathbf{v}=\frac{d x \hat{\mathbf{i}}+d y \hat{\mathbf{j}}}{d t}=\frac{d x}{d t} \hat{\mathbf{i}}+\frac{d y}{d t} \hat{\mathbf{j}} \\
\end{array}
\)
\(
\Rightarrow \quad \mathbf{v}=v_x \hat{\mathbf{i}}+v_y \hat{\mathbf{j}}
\)
Similarly, in three dimensions, we can write
\(
\mathbf{v}=v_x \hat{\mathbf{i}}+v_y \hat{\mathbf{j}}+v_z \hat{\mathbf{k}}
\)
where, \(v_x=\frac{d x}{d t}\) is magnitude of instantaneous velocity in \(v_y=\frac{d y}{d t}\) is magnitude of instantaneous velocity in and \(\quad v_z=\frac{d z}{d t}\) is magnitude of instantaneous velocity in \(z\)-direction.
Magnitude of instantaneous velocity, \(|\mathbf{v}|=\sqrt{v_x^2+v_y^2}\)
Direction of instantaneous velocity \(\mathbf{v}\) with \(X\)-axis,
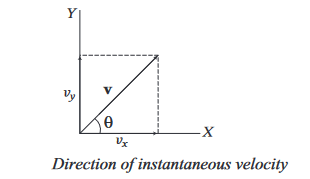
\tan \theta=\frac{v_y}{v_x} \Rightarrow \theta=\tan ^{-1}\left(\frac{v_y}{v_x}\right)
\)
Example 19: Position vector of a particle is given as
\(
\mathbf{r}=2 t \hat{\mathbf{i}}+3 t^2 \hat{\mathbf{j}}
\)
where, \(t\) is in seconds and the coefficients have the proper units, for \(r\) to be in metres.
(i) Find instantaneous velocity \(\mathbf{v}(t)\) of the particle.
(ii) Find magnitude and direction of \(\mathbf{v}(t)\) at \(t=2 \mathrm{~s}\).
Solution: Given, \(\mathbf{r}=2 t \hat{\mathbf{i}}+3 t^2 \hat{\mathbf{j}}\)
(i) Instantaneous velocity, \(\mathbf{v}(t)=\frac{d \mathbf{r}}{d t}=\frac{d}{d t}\left(2 \hat{\mathbf{i}}+3 t^2 \hat{\mathbf{j}}\right)\)
\(
\Rightarrow \quad \mathbf{v}=v_x \hat{\mathbf{i}}+v_y \hat{\mathbf{j}}=2 \hat{\mathbf{i}}+6 t \hat{\mathbf{j}}
\)
(ii) Magnitude of \(\mathbf{v}(t)\),
\(
|\mathbf{v}(t)|=\sqrt{v_x^2+v_y^2}=\sqrt{(2)^2+(6 t)^2}=\sqrt{4+36 t^2}
\)
At \(t=2 \mathrm{~s}, \quad|\mathrm{v}(t)|=\sqrt{4+36 \times 4}=\sqrt{148} \mathrm{~ms}^{-1}\)
Direction of \(\mathbf{v}(t), \theta=\tan ^{-1}\left(\frac{v_y}{v_x}\right)=\tan ^{-1}\left(\frac{6 t}{2}\right)=\tan ^{-1}(3 t)\)
At \(t=2 \mathrm{~s}, \quad \theta=\tan ^{-1}(3 \times 2) \approx \tan ^{-1}(6) \mathrm{rad}\)
Acceleration vector
It is defined as the rate of change of velocity. It can be expressed as
\(
\text { Acceleration }=\frac{\text { Change in velocity }}{\text { Time taken }}
\)
It is of two types as follows
(i) Average acceleration
(ii) Instantaneous acceleration
Average acceleration
It is defined as the change in velocity \((\Delta \mathbf{v})\) divided by the corresponding time interval \((\Delta t)\). It can be expressed as
Average acceleration, \(\mathbf{a}_{\mathrm{av}}=\frac{\Delta \mathbf{v}}{\Delta t}=\frac{\Delta v_x \hat{\mathbf{i}}+\Delta v_y \hat{\mathbf{j}}}{\Delta t}\)
\(
=\frac{\Delta v_x}{\Delta t} \hat{\mathbf{i}}+\frac{\Delta v_y}{\Delta t} \hat{\mathbf{j}}
\)
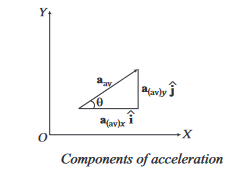
\(
\text { Average acceleration }=\mathbf{a}_{(a v) x} \hat{\mathbf{i}}+\mathbf{a}_{(\text {av) } y} \hat{\mathbf{j}}
\)
which is expressed in component form
where, \(\mathbf{a}_{(\mathrm{av}) x}=\frac{\Delta v_x}{\Delta t}=\) average acceleration in \(x\)-direction and \(\mathbf{a}_{(\mathrm{av}) y}=\frac{\Delta v_y}{\Delta t}=\) average acceleration in \(y\)-direction.
In three dimensions, we can write
\(
\mathbf{a}_{\mathrm{av}}=a_{(\mathrm{av}) x} \hat{\mathbf{i}}+a_{(\mathrm{av}) y} \hat{\mathbf{j}}+a_{(\mathrm{av}) z} \hat{\mathbf{k}}
\)
Angle \(\theta\) made by average acceleration with \(X\)-axis is
\(
\tan \theta=\frac{a_{(\mathrm{av}) y}}{a_{(\mathrm{av}) x}} \Rightarrow \theta=\tan ^{-1}\left(\frac{a_{(\mathrm{av}) y}}{a_{(\mathrm{av}) x}}\right)
\)
Example 20: Velocity of a particle changes from \((3 \hat{\mathbf{i}}+4 \hat{\mathbf{j}}) \mathrm{m} / \mathrm{s}\) to \((6 \hat{\mathbf{i}}+5 \hat{\mathbf{j}}) \mathrm{m} / \mathrm{s}\) in \(2 \mathrm{~s}\). Find magnitude and direction of average acceleration.
Solution: Given, velocity vectors of the particle,
\(
\begin{array}{l}
\qquad \mathbf{v}_1=3 \hat{\mathbf{i}}+4 \hat{\mathbf{j}} \\
\text { and } \mathbf{v}_2=6 \hat{\mathbf{i}}+5 \hat{\mathbf{j}} \\
\text { Change in velocity, } \\
\Delta \mathbf{v}_x=\left(v_2\right)_x-\left(v_1\right)_x \hat{\mathbf{i}}=(6-3) \hat{\mathbf{i}}=3 \hat{\mathbf{i}} \\
\Delta \mathbf{v}_y\left.=\left(v_2\right)_y-\left(v_1\right)_y\right) \hat{\mathbf{j}}=(5-4) \hat{\mathbf{j}}=\hat{\mathbf{j}} \\
\therefore \Delta \mathbf{v}=\Delta \mathbf{v}_x+\Delta \mathbf{v}_y=3 \hat{\mathbf{i}}+\hat{\mathbf{j}}
\end{array}
\)
Change in velocity,
\(
\begin{aligned}
\Delta \mathbf{v}_x & =\left(v_2\right)_x-\left(v_1\right)_x \hat{\mathbf{i}}=(6-3) \hat{\mathbf{i}}=3 \hat{\mathbf{i}} \\
\Delta \mathbf{v}_y & \left.=\left(v_2\right)_y-\left(v_1\right)_y\right) \hat{\mathbf{j}}=(5-4) \hat{\mathbf{j}}=\hat{\mathbf{j}} \\
\therefore \Delta \mathbf{v} & =\Delta \mathbf{v}_x+\Delta \mathbf{v}_y=3 \hat{\mathbf{i}}+\hat{\mathbf{j}}
\end{aligned}
\)
Average acceleration,
\(
\begin{aligned}
\mathbf{a}_{\mathrm{av}} & =\frac{\Delta \mathbf{v}}{\Delta t}=\frac{3 \hat{\mathbf{i}}+\hat{\mathbf{j}}}{2} \\
& =1.5 \hat{\mathbf{i}}+0.5 \hat{\mathbf{j}}
\end{aligned} \quad(\because t=2 \mathrm{~s})
\)
Direction of average acceleration,
\(
\begin{aligned}
\tan \theta & =\frac{a_{(\mathrm{av}) y}}{a_{(\mathrm{av}) x}}=\frac{0.5}{1.5}=\frac{1}{3} \\
\Rightarrow \quad \theta & =\tan ^{-1}\left(\frac{1}{3}\right) \\
& \approx 18.43^{\circ} \text { with } X \text {-axis }
\end{aligned}
\)
Instantaneous acceleration
It is defined as the limiting value of the average acceleration as the time interval approaches to zero.
It can be expressed as
\(
\mathbf{a}=\lim _{\Delta t \rightarrow 0} \frac{\Delta \mathbf{v}}{\Delta t}=\frac{d \mathbf{v}}{d t}
\)
Instantaneous acceleration,
where,
\(
\mathbf{a}=a_x \hat{\mathbf{i}}+a_y \hat{\mathbf{j}}
\)
\(a_x=\) magnitude of instantaneous acceleration in \(x\)-direction
\(
=\frac{d v_x}{d t}
\)
\(a_y=\) magnitude of instantaneous acceleration in \(y\)-direction
\(
=\frac{d v_y}{d t}
\)
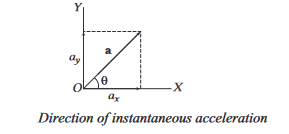
The magnitude of instantaneous acceleration is given by
\(
a=\sqrt{a_x^2+a_y^2}
\)
If acceleration a makes an angle \(\theta\) with \(X\)-axis, then
\(
\tan \theta=\frac{a_y}{a_x} \Rightarrow \theta=\tan ^{-1}\left(\frac{a_y}{a_x}\right)
\)
In three dimensions, we can write
\(
\mathbf{a}=a_x \hat{\mathbf{i}}+a_y \hat{\mathbf{j}}+a_z \hat{\mathbf{k}}
\)
Example 21: The position of a particle is given by
\(
\mathbf{r}=3 t \hat{\mathbf{i}}+2 t^2 \hat{\mathbf{j}}+8 \hat{\mathbf{k}}
\)
where, \(t\) is in seconds and the coefficients have the proper units for \(r\) to be in metres.
(i) Find \(v(t)\) and \(a(t)\) of the particle.
(ii) Find the magnitude and direction of \(v(t)\) and \(a(t)\) at \(t=1 \mathrm{~s}\).
Solution: Position of particle, \(\mathbf{r}=3 t \hat{\mathbf{i}}+2 t^2 \hat{\mathbf{j}}+8 \hat{\mathbf{k}}\)
(i)
\(
\begin{aligned}
\text { As, } \mathbf{v}(t) & =\frac{d \mathbf{r}}{d t} \text { and } \mathbf{a}(t)=\frac{d \mathbf{v}}{d t} \\
\therefore \quad \mathbf{v}(t) & =\frac{d}{d t}\left(3 t \hat{\mathbf{i}}+2 t^2 \hat{\mathbf{j}}+8 \hat{\mathbf{k}}\right)=3 \hat{\mathbf{i}}+4 t \hat{\mathbf{j}} \\
\mathbf{a}(t) & =\frac{d v}{d t}=4 \hat{\mathbf{j}}
\end{aligned}
\)
(ii) \(v(t)=\sqrt{v_x^2+v_y^2}\) and \(\theta=\tan ^{-1}\left(\frac{v_y}{v_x}\right)\)
Velocity, \(\mathbf{v}(t)=3 \hat{\mathbf{i}}+4 t \hat{\mathbf{j}}\)
At \(t=1 \mathrm{~s}\),
\(
v=\sqrt{(3)^2+(4)^2}=5 \mathrm{~ms}^{-1}
\)
\(\Rightarrow\) Direction of \(v(t)=\theta=\tan ^{-1}\left(\frac{4}{3}\right)=53^{\circ}\) with \(X\)-axis
Direction of \(a(t)\), at \(t=1 \mathrm{~s}\),
\(\theta^{\prime}=\tan ^{-1}\left(\frac{a_y}{a_x}\right)=\tan ^{-1}\left(\frac{4}{0}\right)=\tan ^{-1}(\infty)=90^{\circ}\) with \(X\)-axis.