Conceptual PCQs
Summary
- Mechanical waves can exist in material media and are governed by Newton’s Laws.
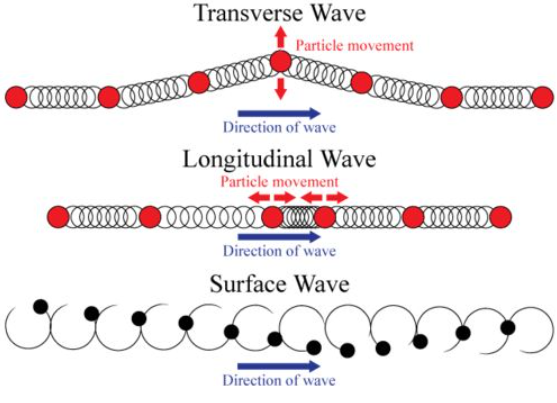
- Transverse waves are waves in which the particles of the medium oscillate perpendicular to the direction of wave propagation.
- Longitudinal waves are waves in which the particles of the medium oscillate along the direction of wave propagation.
- Progressive wave is a wave that moves from one point of medium to another.
- The displacement in a sinusoidal wave propagating in the positive \(x\) direction is given by
\(
y(x, t)=a \sin (k x-\omega t+\phi)
\)
where \(a\) is the amplitude of the wave, \(k\) is the angular wave number, \(\omega\) is the angular frequency, (\(k x-\omega t+\phi\)) is the phase, and \(\phi\) is the phase constant or phase angle. - Wavelength \(\lambda\) of a progressive wave is the distance between two consecutive points of the same phase at a given time. In a stationary wave, it is twice the distance between two consecutive nodes or antinodes.
- Period \(T\) of oscillation of a wave is defined as the time any element of the medium takes to move through one complete oscillation. It is related to the angular frequency \(\omega\) through the relation
\(
T=\frac{2 \pi}{\omega}
\) - Frequency \(\nu\) of a wave is defined as \(1 / T\) and is related to angular frequency by
\(
\nu=\frac{\omega}{2 \pi}
\) - Speed of a progressive wave is given by \(v=\frac{\omega}{\mathrm{k}}=\frac{\lambda}{\mathrm{T}}=\lambda \nu\)
- The speed of a transverse wave on a stretched string is set by the properties of the string. The speed on a string with tension \(T\) and linear mass density \(\mu\) is
\(
v=\sqrt{\frac{T}{\mu}}
\) - Sound waves are longitudinal mechanical waves that can travel through solids, liquids, or gases. The speed \(v\) of sound wave in a fluid having bulk modulus \(B\) and density \(\rho\) is
\(
v=\sqrt{\frac{B}{\rho}}
\)
The speed of longitudinal waves in a metallic bar is
\(
v=\sqrt{\frac{Y}{\rho}}
\)
For gases, since \(B=\gamma P\), the speed of sound is
\(
v=\sqrt{\frac{\gamma P}{\rho}}
\) - When two or more waves traverse simultaneously in the same medium, the displacement of any element of the medium is the algebraic sum of the displacements due to each wave. This is known as the principle of superposition of waves
\(
y=\sum_{i=1}^n f_i(x-v t)
\) - Two sinusoidal waves on the same string exhibit interference, adding or cancelling according to the principle of superposition. If the two are travelling in the same direction and have the same amplitude \(a\) and frequency but differ in phase by a phase constant \(\phi\), the result is a single wave with the same frequency \(\omega\) :
\(
y(x, t)=\left[2 a \cos \frac{1}{2} \phi\right] \sin \left(k x-\omega t+\frac{1}{2} \phi\right)
\)
If \(\phi=0\) or an integral multiple of \(2 \pi\), the waves are exactly in phase and the interference is constructive; if \(\phi=\pi\), they are exactly out of phase and the interference is destructive. - A travelling wave, at a rigid boundary or a closed end, is reflected with a phase reversal but the reflection at an open boundary takes place without any phase change. For an incident wave
\(
y_i(x, t)=a \sin (k x-\omega t)
\)
the reflected wave at a rigid boundary is
\(
y_r(x, t)=-a \sin (k x+\omega t)
\)
For reflection at an open boundary
\(
y_r(x, t)=a \sin (k x+\omega t)
\) - The interference of two identical waves moving in opposite directions produces standing waves. For a string with fixed ends, the standing wave is given by
\(
y(x, t)=[2 a \sin k x] \cos \omega t
\)
Standing waves are characterised by fixed locations of zero displacement called nodes and fixed locations of maximum displacements called antinodes. The separation between two consecutive nodes or antinodes is \(\lambda / 2\).
A stretched string of length \(L\) fixed at both the ends vibrates with frequencies given by
\(
\nu=\frac{n v}{2 L}, \quad n=1,2,3, \ldots
\)
The set of frequencies given by the above relation are called the normal modes of oscillation of the system. The oscillation mode with lowest frequency is called the fundamental mode or the first harmonic. The second harmonic is the oscillation mode with \(n=2\) and so on.
A pipe of length \(L\) with one end closed and other end open (such as air columns) vibrates with frequencies given by
\(
\nu=(\mathrm{n}+1 / 2) \frac{v}{2 \mathrm{~L}}, \quad n=0,1,2,3, \ldots
\)
The set of frequencies represented by the above relation are the normal modes of oscillation of such a system. The lowest frequency given by \(v / 4 L\) is the fundamental mode or the first harmonic. - A string of length \(L\) fixed at both ends or an air column closed at one end and open at the other end or open at both the ends, vibrates with certain frequencies called their normal modes. Each of these frequencies is a resonant frequency of the system.
- Beats arise when two waves having slightly different frequencies, \(\nu_1\) and \(\nu_2\) and comparable amplitudes, are superposed. The beat frequency is
\(
\nu_{\text {beat }}=\nu_1 \sim \nu_2
\)
Quiz Summary
0 of 38 Questions completed
Questions:
Information
You have already completed the quiz before. Hence you can not start it again.
Quiz is loading…
You must sign in or sign up to start the quiz.
You must first complete the following:
Results
Results
0 of 38 Questions answered correctly
Your time:
Time has elapsed
You have reached 0 of 0 point(s), (0)
Earned Point(s): 0 of 0, (0)
0 Essay(s) Pending (Possible Point(s): 0)
Categories
- Not categorized 0%
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- Current
- Review
- Answered
- Correct
- Incorrect
- Question 1 of 38
1. Question
A sine wave is travelling in a medium. The minimum distance between the two particles, always having same speed, is
CorrectIncorrectHint
(c) Define the particle velocity:
A travelling sine wave can be represented by the equation \(y(x, t)=A \sin (k x-\omega t)\). The velocity of a particle at position \(x\) and time \(t\) is the partial derivative of the displacement with respect to time:
\(
v_p=\frac{\partial y}{\partial t}=-A \omega \cos (k x-\omega t)
\)
The speed of the particle is the magnitude of this velocity:
\(
\left|v_p\right|=|A \omega \cos (k x-\omega t)|
\)
Determine the condition for equal speed:
For two particles at positions \(x_1\) and \(x_2\) to always have the same speed, their velocity magnitudes must be equal for all values of \(t\) :
\(
\left|A \omega \cos \left(k x_1-\omega t\right)\right|=\left|A \omega \cos \left(k x_2-\omega t\right)\right|
\)
This implies that the cosine terms must satisfy:
\(
\cos \left(k x_1-\omega t\right)= \pm \cos \left(k x_2-\omega t\right)
\)
Calculate the minimum distance:
To satisfy the equality \(\cos \theta_1= \pm \cos \theta_2\), the phase difference \(\Delta \phi=k x_2-k x_1\) must result in values where the speeds are identical.
If \(\Delta \phi=\pi\), then \(\cos \left(k x_2-\omega t\right)=\cos \left(k x_1-\omega t+\pi\right)=-\cos \left(k x_1-\omega t\right)\).
Since speed is the absolute value, \(|-\cos \theta|=|\cos \theta|\), the speeds are identical at all times.
Using the relationship between phase difference (\(\Delta \phi\)) and path difference (\(\Delta x\)):
\(
\Delta \phi=\frac{2 \pi}{\lambda} \Delta x
\)
Setting \(\Delta \phi=\pi\) for the minimum non-zero distance:
\(
\pi=\frac{2 \pi}{\lambda} \Delta x \Longrightarrow \Delta x=\frac{\lambda}{2}
\)
The minimum distance between two particles that always have the same speed is \(\lambda / 2\). - Question 2 of 38
2. Question
A sine wave is travelling in a medium. A particular particle has zero displacement at a certain instant. The particle closest to it having zero displacement is at a distance
CorrectIncorrectHint
Step 1: Define the Wave Equation
A travelling sine wave can be represented by the displacement equation:
\(
y(x, t)=A \sin (k x-\omega t+\phi)
\)
where \(A\) is the amplitude, \(k=\frac{2 \pi}{\lambda}\) is the wave number, and \(\omega\) is the angular frequency.
Step 2: Identify Points of Zero Displacement
A particle has zero displacement \((y=0)\) when the argument of the sine function is an integer multiple of \(\pi\). For a fixed instant in time \(t_0\), the condition for zero displacement at position \(x\) is:
\(
k x-\omega t_0+\phi=n \pi
\)
where \(n\) is an integer \((0, \pm 1, \pm 2, \ldots)\).
Step 3: Calculate the Distance Between Successive Points
Let \(x_n\) and \(x_{n+1}\) be the positions of two consecutive particles with zero displacement. Using the condition above:
\(
\begin{gathered}
k x_{n+1}-k x_n=(n+1) \pi-n \pi \\
k\left(x_{n+1}-x_n\right)=\pi
\end{gathered}
\)
Substituting \(k=\frac{2 \pi}{\lambda}\) into the equation:
\(
\begin{gathered}
\frac{2 \pi}{\lambda} \Delta x=\pi \\
\Delta x=\frac{\lambda}{2}
\end{gathered}
\)
The particle closest to one with zero displacement that also has zero displacement is at a distance of \(1 / 2\).Alternate: Step 1: Analyze the Geometry of a Sine Wave
A sine wave is defined by the equation:
\(
y(x, t)=A \sin (k x-\omega t)
\)
Displacement is zero \((y=0)\) whenever the argument of the sine function is a multiple of \(\pi\). These points are called nodes in a stationary wave, or simply “zero-crossings” in a traveling wave.
Step 2: Identify the Zero Points
In a single wavelength (\(\lambda\)), which corresponds to a phase of \(2 \pi\), the sine curve crosses the horizontal axis (zero displacement) at specific intervals:
At the start of the cycle ( 0 )
At the middle of the cycle \((\pi)\)
At the end of the cycle \((2 \pi)\)
Step 3: Calculate the Distance
The distance between the start (0) and the end (\(2 \pi\)) is one full wavelength, \(\lambda\).
The closest particle also having zero displacement is located at the halfway point:
\(
\text { Distance }=\frac{\pi}{2 \pi} \times \lambda=\frac{\lambda}{2}
\)
While the particle at distance \(\lambda\) also has zero displacement, it is not the closest one. The particle at \(\lambda / 2\) is the nearest neighbor with zero displacement (though it will be moving in the opposite direction). - Question 3 of 38
3. Question
Which of the following equations represents a wave travelling along \(Y\)-axis?
CorrectIncorrectHint
(a) Step 1: Identify the Direction of Propagation
In the wave function argument (\(k y \pm \omega t\)), the variable associated with the wave number \(k\) tells you the axis of propagation.
If the argument contains \(x\), the wave travels along the \(X\)-axis.
If the argument contains \(y\), the wave travels along the \(Y\)-axis.
In this case, options (a), (c), and (d) all contain ky, suggesting motion or orientation along the \(Y\)-axis. However, we must distinguish between traveling and standing waves.
Step 2: Distinguish Between Traveling and Standing Waves
A traveling (progressive) wave must have the form \(f(k y \pm \omega t)\). This represents a pattern that shifts in space as time progresses.
Option (a) fits this form: \(x=A \sin (k y-\omega t)\).
Options (c) and (d) are in the form \(f(k y) \cdot g(\omega t)\). When spatial and temporal terms are multiplied separately, it represents a standing wave, not a traveling one.
Step 3: Determine the Displacement Direction
The variable on the left side of the equation (the dependent variable) represents the direction in which the particles of the medium oscillate (displacement).
In \(x=A \sin (k y-\omega t)\), the wave travels along the \(Y\)-axis, while the particles vibrate along the \(X\)-axis. This describes a transverse wave traveling vertically.
In \(y=A \sin (k x-\omega t)\) (Option b), the wave travels along the \(X\)-axis, which is the opposite of what the question asks.
\(
\begin{array}{|l|l|l|}
\hline \text { Equation } & \text { Type of Wave } & \text { Direction of Propagation } \\
\hline x=A \sin (k y-\omega t) & \text { Traveling } & Y \text {-axis } \\
\hline y=A \sin (k x-\omega t) & \text { Traveling } & X \text {-axis } \\
\hline y=A \sin k y \cos \omega t & \text { Standing } & \text { N/A (Fixed positions) } \\
\hline
\end{array}
\) - Question 4 of 38
4. Question
The equation \(y=A \sin ^2(k x-\omega t)\) represents a wave motion with
CorrectIncorrectHint
(b) Step 1: Use the Power-Reduction Identity
The given equation is \(y=A \sin ^2(k x-\omega t)\). We use the trigonometric identity:
\(
\sin ^2 \theta=\frac{1-\cos (2 \theta)}{2}
\)
Applying this to our wave equation where \(\theta=(k x-\omega t)\) :
\(
\begin{aligned}
y & =A\left[\frac{1-\cos (2(k x-\omega t))}{2}\right] \\
y & =\frac{A}{2}-\frac{A}{2} \cos (2 k x-2 \omega t)
\end{aligned}
\)
Step 2: Identify the New Amplitude
The term \(\frac{A}{2}\) at the beginning of the equation is a constant vertical shift (the wave oscillates around \(y=A / 2\) instead of \(y=0)\). The actual amplitude is the coefficient of the oscillating cosine term.
New Amplitude \(\left(A^{\prime}\right)=A / 2\)
Step 3: Identify the New Frequency
The standard form of a wave is \(y=A \cos \left(k^{\prime} x-\omega^{\prime} t\right)\), where \(\omega^{\prime}\) is the angular frequency.
Looking at our transformed equation:
The new angular frequency is \(\omega^{\prime}=2 \omega\)
To find the linear frequency \(\left(f^{\prime}\right)\) :
\(
f^{\prime}=\frac{\omega^{\prime}}{2 \pi}=\frac{2 \omega}{2 \pi}=\frac{\omega}{\pi}
\)
Summary:
By squaring the sine function, the wave effectively “doubles up” its frequency and halves its peak-to-peak displacement relative to the original amplitude \(A\).
Amplitude: \(A / 2\)
Frequency: \(\omega / \pi\) - Question 5 of 38
5. Question
Which of the following is a mechanical wave?
CorrectIncorrectHint
(d) Step 1: Define Mechanical Waves
A mechanical wave is a wave that requires a physical medium (like air, water, or a solid) to travel through. It works by causing the particles of the medium to oscillate and transfer energy to their neighbors. Without matter, a mechanical wave cannot exist.
Sound waves are longitudinal mechanical waves. They travel through the vibration of molecules in a gas, liquid, or solid. In a vacuum (like outer space), sound cannot travel because there are no particles to vibrate.
Step 2: Define Electromagnetic Waves
Options (a), (b), and (c) are all types of electromagnetic (EM) waves. Unlike mechanical waves, EM waves are created by oscillating electric and magnetic fields.
Radio waves, \(X\)-rays, and Light waves do not need a medium. They can travel through a vacuum at the speed of light (\(c \approx 3 \times 10^8 \mathrm{~m} / \mathrm{s}\)).
\(
\begin{array}{|l|l|l|}
\hline \text { Feature } & \begin{array}{l}
\text { Mechanical Waves (e.g., } \\
\text { Sound) }
\end{array} & \begin{array}{l}
\text { Electromagnetic Waves (e.g., } \\
\text { Light) }
\end{array} \\
\hline \begin{array}{l}
\text { Medium } \\
\text { Required? }
\end{array} & \text { Yes (Solid, Liquid, or Gas) } & \text { No (Can travel in a vacuum) } \\
\hline \text { Mechanism } & \text { Particle vibration } & \text { Oscillating E and B fields } \\
\hline \text { Speed } & \begin{array}{l}
\text { Relatively slow (approx. } \\
343 \mathrm{~m} / \mathrm{s} \text { in air) }
\end{array} & \begin{array}{l}
\text { Extremely fast (approx. } \\
300,000,000 \mathrm{~m} / \mathrm{s})
\end{array} \\
\hline \text { Examples } & \begin{array}{l}
\text { Sound, Water waves, } \\
\text { Seismic waves }
\end{array} & \begin{array}{l}
\text { Radio, Microwaves, X-rays, } \\
\text { Visible light }
\end{array} \\
\hline
\end{array}
\) - Question 6 of 38
6. Question
A cork floating in a calm pond executes simple harmonic motion of frequency \(\)\nu\(\) when a wave generated by a boat passes by it. The frequency of the wave is
CorrectIncorrectHint
(a) Step 1: Understand Wave-Particle Interaction
When a transverse wave (like a water wave) travels through a medium, the particles of the medium (or objects floating on it, like a cork) do not travel along with the wave. Instead, they oscillate back and forth about their equilibrium position.
Step 2: Relate the Oscillations
The floating cork acts as a marker for the water surface. As the wave passes:
The crest of the wave lifts the cork to its maximum height.
The trough of the wave drops the cork to its lowest point.
Because the cork is moved directly by the displacement of the wave, one full cycle of the wave passing the cork results in exactly one full oscillation of the cork.
Step 3: Conclusion on Frequency
The frequency of a wave is defined as the number of cycles that pass a point per unit of time. Since the cork completes one full oscillation for every wave cycle that passes it:
Frequency of the cork’s SHM = Frequency of the wave
Therefore, if the cork oscillates with frequency \(\nu\), the wave must also have a frequency of \(\nu\).Alternate: Understand wave-particle interaction:
When a mechanical wave, such as a water wave, travels through a medium, it transfers energy from one location to another. The individual particles of the medium (or objects floating on it, like a cork) do not travel with the wave. Instead, they oscillate about their equilibrium positions [1, 2, 3].
Identify the driving frequency:
A floating cork acts as a marker for the motion of the water surface. As the crests and troughs of the wave pass the cork’s position, the cork is forced to move up and down. In a periodic wave, the rate at which these crests pass a fixed point is defined as the frequency of the wave, \(f[4,5]\).
Match the frequencies:
Because the cork’s motion is directly caused by the passing wave, the cork must complete one full oscillation (up and down) for every single wave cycle that passes it. Therefore, the frequency of the cork’s simple harmonic motion, \(\nu\), is identical to the frequency of the wave that generates that motion \([2,5]\).
The frequency of the wave is \(\nu\). - Question 7 of 38
7. Question
Two strings \(A\) and \(B\), made of same material, are stretched by same tension. The radius of string \(A\) is double of the radius of \(B\). A transverse wave travels on \(A\) with speed \(v_A\) and on \(B\) with speed \(v_B\). The ratio \(v_A / v_B\) is
CorrectIncorrectHint
(a) To find the ratio of the speeds, we look at how the physical properties of the strings affect wave velocity.
Step 1: Relate Velocity to String Properties
The speed of a transverse wave on a stretched string is given by the formula:
\(
v=\sqrt{\frac{T}{\mu}}
\)
Where:
\(T\) is the tension in the string.
\(\mu\) is the linear mass density (mass per unit length).
Step 2: Express Linear Mass Density in terms of Radius
Since both strings are made of the same material, they have the same volume density (\(\rho\)). The linear mass density \(\mu\) can be expressed as:
\(
\mu=\frac{\text { Mass }}{\text { Length }}=\frac{\text { Volume × } \rho}{L}=\frac{\left(\pi r^2 L\right) \rho}{L}=\pi r^2 \rho
\)
Substituting this back into the velocity formula:
\(
v=\sqrt{\frac{T}{\pi r^2 \rho}}
\)
Since \(T, \pi\), and \(\rho\) are constant for both strings, we can see that:
\(
v \propto \frac{1}{r}
\)
Step 3: Calculate the Ratio
Given that the radius of string \(A\left(r_A\right)\) is double the radius of string \(B\left(r_B\right)\) :
\(
r_A=2 r_B
\)
Now, we set up the ratio of the speeds:
\(
\begin{gathered}
\frac{v_A}{v_B}=\frac{r_B}{r_A} \\
\frac{v_A}{v_B}=\frac{r_B}{2 r_B}=\frac{1}{2}
\end{gathered}
\)
Summary: Because string \(\boldsymbol{A}\) is thicker (larger radius), it is “heavier” per unit length. This increased inertia slows down the wave, resulting in a speed that is half that of the thinner string \(B\). - Question 8 of 38
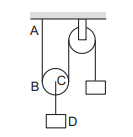
8. Question
Both the strings, shown in figure (below), are made of same material and have same cross section. The pulleys are light. The wave speed of a transverse wave in the string \(A B\) is \(v_1\) and in \(C D\) it is \(v_2\). Then \(v_1 / v_2\) is
 CorrectIncorrect
CorrectIncorrectHint
(d) Step 1: Understand the Relationship Between Speed and Tension
The speed of a transverse wave on a string depends on the tension \((T)\) and the linear mass density \((\mu)\) :
\(
v=\sqrt{\frac{T}{\mu}}
\)
Since both strings are made of the same material and have the same cross-section, their linear mass densities (\(\mu\)) are identical. Therefore, the speed is directly proportional to the square root of the tension:
\(
v \propto \sqrt{T} \Longrightarrow \frac{v_1}{v_2}=\sqrt{\frac{T_{A B}}{T_{C D}}}
\)
Step 2: Analyze the Tension using Statics
In a standard pulley setup where a mass \(M\) is hung:
String CD: This string is directly connected to the mass \(M\) (or supports it directly). In the configuration shown in typical problems of this type (where string \(A B\) passes over a pulley to support string \(C D\)), the tension in the main string \(A B\) is \(T\).
String AB : Let the tension in string \(A B\) be \(T_1\).
Pulley Balance: String CD is attached to a movable pulley supported by two strands of string \(A B\). For the pulley to be in equilibrium:
\(
T_{C D}=2 T_{A B}
\)
(Alternatively, if \(A B\) is the lower string and \(C D\) is the upper, the relationship is \(T_{A B}= 2 T_{C D}\). Based on the standard Figure 15-Q1 in common physics texts, string \(A B\) is the single strand and CD is the strand attached to the load through a pulley system.)
Step 3: Calculate the Ratio
Assuming the standard configuration where the tension in \(C D\) is twice the tension in \(A B\) ( \(T_2=2 T_1\)):
\(
\frac{v_1}{v_2}=\sqrt{\frac{T_1}{T_2}}=\sqrt{\frac{T_1}{2 T_1}}=\frac{1}{\sqrt{2}}
\)
If the figure indicates that \(A B\) supports the pulley (double tension) and \(C D\) is the single strand:
\(
\frac{v_1}{v_2}=\sqrt{\frac{2 T}{T}}=\sqrt{2}
\)
In the specific context of this classic problem (e.g., from HC Verma), the tension in string \(A B\) is \(T\) and the tension in string \(C D\) is \(2 T\).
Therefore:
\(
\frac{v_1}{v_2}=\sqrt{\frac{1}{2}}=\frac{1}{\sqrt{2}}
\) - Question 9 of 38
9. Question
Velocity of sound in air is \(332 \mathrm{~m} \mathrm{~s}^{-1}\). Its velocity in vacuum will be
CorrectIncorrectHint
(d) To understand why “meaningless” is the most accurate choice, we can look at the fundamental nature of sound waves.
Step 1: Identify the Nature of Sound
Sound is a mechanical wave. Mechanical waves require a physical medium-such as a gas (air), liquid (water), or solid (steel)-to travel. This is because sound propagates through the collision and vibration of particles.
Step 2: Define a Vacuum
A vacuum is a space that is entirely devoid of matter. Since there are no atoms or molecules in a vacuum, there is nothing to vibrate or transmit the energy of a sound wave from one point to another.
Step 3: Conclude on Velocity
Because sound cannot exist or propagate in a vacuum, it does not have a “velocity” there.
It is not just “zero” in the sense of a stationary object; rather, the concept of sound traveling through a vacuum is physically impossible.
Therefore, asking for the velocity of sound in a vacuum is meaningless.
Note: This is a key difference between sound and light. Light is an electromagnetic wave and does not require a medium, which is why it travels at its maximum velocity (\(c \approx 3 \times 10^8 \mathrm{~m} / \mathrm{s}\)) in a vacuum. - Question 10 of 38
10. Question
A wave pulse, travelling on a two-piece string, gets partially reflected and partially transmitted at the junction. The reflected wave is inverted in shape as compared to the incident one. If the incident wave has wavelength \(\lambda\) and the transmitted wave \(\lambda^{\prime}\),
CorrectIncorrectHint
(c) To understand why the transmitted wavelength is shorter, we can analyze the behavior of the wave at the junction using these steps:
Step 1: Identify the Boundary Condition
When a wave pulse is inverted upon reflection, it indicates that the wave has hit a denser medium (a string with higher linear mass density, \(\mu\)).
Reflection with inversion occurs when moving from a “lighter” string to a “heavier” string.
Therefore, the second string is denser than the first (\(\mu_2>\mu_1\)).
Step 2: Compare Wave Speeds
The speed of a wave on a string is given by \(v=\sqrt{T / \mu}\). Since the tension (\(T\)) is the same throughout the connected strings:
As the linear mass density \(\mu\) increases, the wave speed \(v\) decreases.
This means the speed of the transmitted wave \(\left(v^{\prime}\right)\) is slower than the speed of the incident wave \((v)\) :
\(
v^{\prime}<v
\)
Step 3: Relate Speed to Wavelength
The frequency (\(f\)) of a wave is determined by the source. When a wave passes from one medium to another, its frequency remains constant. We use the wave equation:
\(
v=f \lambda \quad \text { and } \quad v^{\prime}=f \lambda^{\prime}
\)
Since \(f\) is constant, the wavelength is directly proportional to the speed \((v \propto \lambda)\).
Because the wave slows down in the second string \(\left(v^{\prime}<v\right)\), the wavelength must also decrease.
Therefore: \(\lambda^{\prime}<\lambda\)
Summary
Lighter to Heavier: Speed decreases, wavelength decreases, reflected wave is inverted.
Heavier to Lighter: Speed increases, wavelength increases, reflected wave is upright. - Question 11 of 38
11. Question
Two waves represented by \(y=a \sin (\omega t-k x)\) and \(y=a \cos (\omega t-k x)\) are superposed. The resultant wave will have an amplitude
CorrectIncorrectHint
(b) To find the amplitude of the resultant wave, we need to look at the phase relationship between the two individual waves.
Step 1: Standardize the Wave Equations
First, we look at the two wave functions:
\(
\begin{aligned}
& y_1=a \sin (\omega t-k x) \\
& y_2=a \cos (\omega t-k x)
\end{aligned}
\)
To compare them directly, convert the cosine function into a sine function using the trigonometric identity \(\cos (\theta)=\sin \left(\theta+\frac{\pi}{2}\right)\) :
\(
y_2=a \sin \left(\omega t-k x+\frac{\pi}{2}\right)
\)
Step 2: Identify the Phase Difference
Now that both waves are in the sine form, we can see they have the same amplitude (\(a\)) and frequency, but they are out of phase. The phase difference \((\phi)\) between them is:
\(
\phi=\frac{\pi}{2}\left(\text { or } 90^{\circ}\right)
\)
Step 3: Calculate the Resultant Amplitude
When two waves superpose, the resultant amplitude \(A\) is determined by the formula:
\(
A=\sqrt{a_1^2+a_2^2+2 a_1 a_2 \cos \phi}
\)
Substitute the values \(a_1=a_1, a_2=a\), and \(\phi=\frac{\pi}{2}\) into the equation:
\(
A=\sqrt{a^2+a^2+2(a)(a) \cos \left(\frac{\pi}{2}\right)}
\)
Since \(\cos \left(90^{\circ}\right)=0\), the term on the right cancels out:
\(
\begin{gathered}
A=\sqrt{a^2+a^2+0} \\
A=\sqrt{2 a^2} \\
A=a \sqrt{2}
\end{gathered}
\) - Question 12 of 38
12. Question
Two wires \(A\) and \(B\), having identical geometrical construction, are stretched from their natural length by small but equal amount. The Young modulus of the wires are \(Y_A\) and \(Y_B\) whereas the densities are \(\rho_A\) and \(\rho_B\). It is given that \(Y_A>Y_B\) and \(\rho_A>\rho_B\). A transverse signal started at one end takes a time \(t_1\) to reach the other end for \(A\) and \(t_2\) for \(B\).
CorrectIncorrectHint
(d) the information is insufficient to find the relation between \(t_1\) and \(t_2\).
To determine the relationship between \(t_1\) and \(t_2\), we need to look at how the speed of a transverse wave on a string relates to Young’s modulus and density.
Step 1: Relate Wave Speed to Tension and Density
The speed \(v\) of a transverse wave on a stretched wire is given by:
\(
v=\sqrt{\frac{T}{\mu}}
\)
Where \(T\) is the tension and \(\mu\) is the mass per unit length (linear density).
Since \(\mu=\) density × area of cross-section \(=\rho A\), we have:
\(
v=\sqrt{\frac{T}{\rho A}}
\)
Step 2: Incorporate Young’s Modulus
Young’s modulus \((Y)\) is defined as the ratio of stress to strain:
\(
Y=\frac{T / A}{\Delta L / L} \Longrightarrow \frac{T}{A}=Y \frac{\Delta L}{L}
\)
Substituting this into the velocity equation:
\(
v=\sqrt{\frac{Y \Delta L}{\rho L}}
\)
Step 3: Compare the Two Wires
The problem states that both wires have identical geometrical construction (\(L\) and \(A\) are the same) and are stretched by the equal amount (\(\Delta L\) is the same). Therefore, the velocity depends only on the ratio of \(Y\) to \(\rho\) :
\(
v \propto \sqrt{\frac{Y}{\rho}}
\)
The time \(t\) taken to travel the length \(L\) is \(t=L / v\). Thus:
\(
t \propto \sqrt{\frac{\rho}{Y}}
\)
Step 4: Analyze the Given Ratios
We are given:
\(Y_A>Y_B\) (This tends to make \(t_1\) smaller than \(t_2\))
\(\rho_A>\rho_B\) (This tends to make \(t_1\) larger than \(t_2\))
Because both the numerator \((\rho)\) and the denominator \((Y)\) are larger for wire \(A\) than for wire \(B\), we cannot determine which wire has the higher velocity without knowing the exact numerical values or the specific ratio of \(Y / \rho\) for each material. - Question 13 of 38
13. Question
Consider two waves passing through the same string. Principle of superposition for displacement says that the net displacement of a particle on the string is sum of the displacements produced by the two waves individually. Suppose we state similar principles for the net velocity of the particle and the net kinetic energy of the particle. Such a principle will be valid for
CorrectIncorrectHint
(b) To determine which principles are valid, we need to look at the mathematical nature of velocity and kinetic energy in the context of superposition.
Step 1: Analyze Particle Velocity
The displacement of a particle in a medium where two waves, \(y_1\) and \(y_2\), are superposed is given by:
\(
y=y_1+y_2
\)
The velocity of a particle \(\left(v_p\right)\) is the first derivative of displacement with respect to time \((t)\) :
\(
v_p=\frac{\partial y}{\partial t}=\frac{\partial\left(y_1+y_2\right)}{\partial t}
\)
Using the sum rule for derivatives:
\(
v_p=\frac{\partial y_1}{\partial t}+\frac{\partial y_2}{\partial t}=v_1+v_2
\)
Since the total velocity is the simple sum of the individual velocities, the principle of superposition holds for velocity.
Step 2: Analyze Kinetic Energy
The kinetic energy (\(K\)) of a small element of the string is proportional to the square of its velocity:
\(
K \propto v_p^2
\)
If we substitute the combined velocity from Step 1:
\(
\begin{gathered}
K \propto\left(v_1+v_2\right)^2 \\
K \propto v_1^2+v_2^2+2 v_1 v_2
\end{gathered}
\)
For the principle of superposition to be valid for kinetic energy, the total energy would have to be simply \(K_1+K_2\) (which is \(v_1^2+v_2^2\)). However, the presence of the cross-term (\(2 v_1 v_2\) ) means that the total kinetic energy is not generally equal to the sum of the individual kinetic energies.
Step 3: Conclusion
Velocity: Linear relationship (First power), so superposition is valid.
Kinetic Energy: Non-linear relationship (Second power), so superposition is invalid.
Correct Option: (b) the velocity but not for the kinetic energy - Question 14 of 38
14. Question
Two wave pulses travel in opposite directions on a string and approach each other. The shape of one pulse is inverted with respect to the other.
CorrectIncorrectHint
(d) To understand what happens when two wave pulses meet, we look at the Principle of Superposition and the nature of wave propagation in a medium.
Step 1: The Superposition Phase
As the two pulses (one upright and one inverted) overlap, their displacements add algebraically at every point. Since one is inverted, they will undergo destructive interference. At the exact moment they perfectly overlap, the string may appear flat if the pulses are identical in shape and magnitude.
Step 2: Post-Overlap Behavior
Waves are not physical objects like billiard balls; they are disturbances traveling through a medium. They do not “bounce” off one another. Once the pulses move past the point of overlap, the medium (the string) continues to obey the wave equation.
Each pulse retains its original energy, frequency, and displacement pattern. The “memory” of the pulse shape is maintained by the momentum of the string particles.
Step 3: Conclusion
After the interaction is complete, the pulses emerge on the other side and continue their journey. Their shapes, amplitudes, and velocities remain exactly as they were before the encounter.
Correct Option: (d) the pulses will pass through each other without any change in their shapes. - Question 15 of 38
15. Question
Two periodic waves of amplitudes \(A_1\) and \(A_2\) pass through a region. If \(A_1>A_2\), the difference in the maximum and minimum resultant amplitude possible is
CorrectIncorrectHint
(b) To find the difference between the maximum and minimum resultant amplitudes, we look at the conditions for constructive and destructive interference.
Step 1: Determine Maximum Resultant Amplitude
The maximum amplitude (\(\boldsymbol{A}_{\text {max }}\)) occurs when the two waves are in phase (phase difference \(\phi=0^{\circ}\)). In this state of constructive interference, the amplitudes simply add together:
\(
A_{\max }=A_1+A_2
\)
Step 2: Determine Minimum Resultant Amplitude
The minimum amplitude (\(\boldsymbol{A}_{\text {min }}\)) occurs when the two waves are completely out of phase (phase difference \(\phi=180^{\circ}\)). In this state of destructive interference, the amplitudes subtract from each other. Since \(A_1>A_2\) :
\(
A_{\min }=A_1-A_2
\)
Step 3: Calculate the Difference
The question asks for the difference between these two possible resultant amplitudes:
\(
\text { Difference }=A_{\max }-A_{\min }
\)
Substitute the expressions from Step 1 and Step 2:
\(
\begin{gathered}
\text { Difference }=\left(A_1+A_2\right)-\left(A_1-A_2\right) \\
\text { Difference }=A_1+A_2-A_1+A_2 \\
\text { Difference }=2 A_2
\end{gathered}
\) - Question 16 of 38
16. Question
Two waves of equal amplitude \(A\), and equal frequency travel in the same direction in a medium. The amplitude of the resultant wave is
CorrectIncorrectHint
(d) (d) To find the amplitude of the resultant wave, we must consider the relative phase between the two waves, as the question does not specify if they are perfectly in step.
Step 1: Use the Resultant Amplitude Formula
When two waves of amplitudes \(A_1\) and \(A_2\) with a phase difference \(\phi\) interfere, the resultant amplitude \(A_R\) is given by:
\(
A_R=\sqrt{A_1^2+A_2^2+2 A_1 A_2 \cos \phi}
\)
Since both waves have the same amplitude (\(A_1=A_2=A\)), the formula simplifies to:
\(
\begin{gathered}
A_R=\sqrt{A^2+A^2+2 A^2 \cos \phi} \\
A_R=\sqrt{2 A^2(1+\cos \phi)}
\end{gathered}
\)
Step 2: Analyze the Range of the Cosine Function
The value of \(\cos \phi\) fluctuates based on the phase difference between the waves:
Constructive Interference: If the waves are in phase \(\left(\phi=0^{\circ}\right)\), then \(\cos \left(0^{\circ}\right)=1\).
\(
A_R=\sqrt{2 A^2(1+1)}=\sqrt{4 A^2}=2 A
\)
Destructive Interference: If the waves are out of phase \(\left(\phi=180^{\circ}\right)\), then \(\cos \left(180^{\circ}\right)=-1\).
\(
A_R=\sqrt{2 A^2(1-1)}=0
\)
Step 3: Conclusion
Because the phase difference \(\phi\) can be any value depending on the specific starting positions or timing of the waves, the resultant amplitude can be anything from a minimum of 0 to a maximum of \(2 A\).
Correct Option: (d) between 0 and \(2 A\). - Question 17 of 38
17. Question
Two sine waves travel in the same direction in a medium. The amplitude of each wave is \(A\) and the phase difference between the two waves is \(120^{\circ}\). The resultant amplitude will be
CorrectIncorrectHint
(a) To find the resultant amplitude of the two waves, we can use the principle of superposition and the formula for combining two waves of the same frequency.
Step 1: Use the Resultant Amplitude Formula
When two waves with amplitudes \(A_1\) and \(A_2\) and a phase difference \(\phi\) interfere, the resultant amplitude \(A_R\) is given by:
\(
A_R=\sqrt{A_1^2+A_2^2+2 A_1 A_2 \cos \phi}
\)
Step 2: Substitute the Given Values
From the problem, we know:
Amplitude of the first wave \(\left(A_1\right)=A\)
Amplitude of the second wave \(\left(A_2\right)=A\)
Phase difference \((\phi)=120^{\circ}\)
Substituting these into the formula:
\(
A_R=\sqrt{A^2+A^2+2(A)(A) \cos \left(120^{\circ}\right)}
\)
Step 3: Calculate the Result
The value of \(\cos \left(120^{\circ}\right)\) is \(-\frac{1}{2}\). Plugging this into the equation:
\(
\begin{gathered}
A_R=\sqrt{2 A^2+2 A^2\left(-\frac{1}{2}\right)} \\
A_R=\sqrt{2 A^2-A^2} \\
A_R=\sqrt{A^2} \\
A_R=A
\end{gathered}
\)
When two equal vectors have an angle of \(120^{\circ}\) between them, their resultant is equal to the magnitude of either vector. - Question 18 of 38
18. Question
The fundamental frequency of a string is proportional to
CorrectIncorrectHint
(a) It appears you’re looking for the factors that determine the fundamental frequency \((f)\) of a stretched string. Based on the laws of transverse vibrations (Mersenne’s Laws), the frequency is related to these properties in specific ways.
The formula for the fundamental frequency is:
\(
f=\frac{1}{2 L} \sqrt{\frac{T}{\mu}}
\)
Where \(L\) is the length, \(T\) is the tension, and \(\mu\) is the linear mass density.
Step 1: Relationship with Length
The frequency is inversely proportional to the length of the string (\(f \propto 1 / L\)). If you double the length, the frequency is halved (the pitch drops).
Step 2: Relationship with Tension
The frequency is directly proportional to the square root of the tension \((f \propto \sqrt{T})\). This is why tightening a guitar string raises its pitch.
Step 3: Relationship with Linear Density
The frequency is inversely proportional to the square root of the linear mass density (\(f \propto 1 / \sqrt{\mu}\)). Since linear density depends on the material’s density (\(\rho\)) and the cross-sectional area (which involves the diameter \(d\)), the frequency is also:
Summary of Proportionality:
Frequency is proportional to the inverse of its length.
Frequency is proportional to the square root of tension.
Frequency is inversely proportional to diameter and the square root of density.
Since the prompt looks like a multiple-choice question where the frequency is “proportional to,” the most direct answer is usually (a) inverse of its length. - Question 19 of 38
19. Question
A tuning fork of frequency 480 Hz is used to vibrate a sonometer wire having natural frequency 240 Hz. The wire will vibrate with a frequency of
CorrectIncorrectHint
(b) To determine the frequency at which the sonometer wire vibrates, we need to distinguish between natural frequency and forced frequency.
Step 1: Understand Forced Vibrations
When an external periodic force (like a vibrating tuning fork) is applied to a system (the sonometer wire), the system is forced to vibrate. This is known as forced vibration.
Step 2: Identify the Driving Frequency
In forced vibrations, the object does not vibrate at its own natural frequency. Instead, after a brief initial period, it is compelled to vibrate at the frequency of the external driving agent.
In this case:
Natural Frequency of wire: 240 Hz
Frequency of Tuning Fork (Driving agent): 480 Hz
Step 3: Determine the Resultant Frequency
Regardless of the wire’s natural frequency \((240 \mathrm{~Hz})\), the tuning fork continuously “pushes” the wire at a rate of 480 times per second. Therefore, the wire will vibrate at the frequency of the tuning fork.
Note: Since 480 Hz is an integer multiple of \(240 \mathrm{~Hz}(480=2 \times 240)\), the wire is being driven at its second harmonic. This means the wire will vibrate quite strongly because it is in a state of resonance. - Question 20 of 38
20. Question
A tuning fork of frequency 480 Hz is used to vibrate a sonometer wire having natural frequency 410 Hz. The wire will vibrate with a frequency
CorrectIncorrectHint
(b) To determine the frequency of the wire, we need to apply the physics of forced vibrations.
Step 1: Differentiate Between Natural and Forced Frequency
Every object has a natural frequency (in this case, 410 Hz), which is the frequency at which it would vibrate if it were struck and left alone. However, when an external periodic force-like a vibrating tuning fork-is applied to the system, the system enters a state of forced vibration.
Step 2: Identify the Driving Frequency
In a forced vibration scenario, the object is compelled to move by the external driver. While the object might initially struggle to synchronize, it eventually vibrates at the frequency of the driving force, regardless of its own natural frequency.
Frequency of the Driver (Tuning Fork): 480 Hz
Natural Frequency of the Wire: 410 Hz
Step 3: Determine the Resultant Frequency
Since the tuning fork is the source of the periodic force, it dictates the timing of the vibrations. The sonometer wire will be forced to vibrate at 480 Hz .
Note on Resonance: Because 480 Hz is not a multiple of 410 Hz , the vibrations will likely be weak (low amplitude) compared to the previous example where the frequencies were harmonically related. However, the frequency of the vibration remains exactly that of the source. - Question 21 of 38
21. Question
A sonometer wire of length \(l\) vibrates in fundamental mode when excited by a tuning fork of frequency 416 Hz. If the length is doubled keeping other things same, the string will
CorrectIncorrectHint
(a) Here in this question, we have to find the vibrations of string when the length is doubled, As for which we have to know that, A wave is the vibration of a string. A vibrating string produces a sound with a constant frequency, or pitch, due to resonance. If the string’s length or tension are properly adjusted. And in this question our length is doubled for which some changes may take place.
As from the question, the frequency of the Tuning fork is 416 Hz. Here the only change take place in this is the length is converted into
\(
l \rightarrow 2 l
\)
As from which, only the changes take place between the path of frequency not any other changes take place in the unit number of frequency.
As from which, The wire of the sonometer will always vibrate at frequency 416 Hz because it is being activated by the tuning fork, and any change in length will only affect its basic frequency. From the above conclusion, we get that the string will remain with the frequency of 416 Hz. Therefore, the correct answer is that the string will vibrate with a frequency of 416 Hz.Alternate: To solve this mathematically, we must distinguish between the natural frequency of the string and the actual frequency of its motion during a forced vibration.
The Natural Frequency Calculation
The natural frequency \(f_n\) of a string is given by the formula:
\(
f_n=\frac{1}{2 L} \sqrt{\frac{T}{\mu}}
\)
If the length \(L\) is doubled (\(L^{\prime}=2 L\)) while tension \(T\) and linear mass density \(\mu\) remain constant, the new natural frequency \(f_n^{\prime}\) becomes:
\(
f_n^{\prime}=\frac{1}{2(2 L)} \sqrt{\frac{T}{\mu}}=\frac{1}{2}\left(\frac{1}{2 L} \sqrt{\frac{T}{\mu}}\right)=\frac{1}{2} f_n
\)
If the original natural frequency was 416 Hz , the new natural frequency would be:
\(
f_n^{\prime}=\frac{416}{2}=208 \mathrm{~Hz}
\)
The Forced Frequency (The “Answer”)
In the context of your reasoning, the string is being driven by a tuning fork. In physics, the equation for a forced oscillator is:
\(
m \frac{d^2 x}{d t^2}+b \frac{d x}{d t}+k x=F_0 \sin \left(\omega_d t\right)
\)
Where:
\(\omega_d\) is the angular frequency of the driving force (the tuning fork).
The steady-state solution for the displacement \(x(t)\) is:
\(
x(t)=A \sin \left(\omega_d t-\delta\right)
\)
Mathematically, the frequency of the resulting vibration is always equal to the driving frequency \(\omega_d\), regardless of the system’s natural frequency \(\omega_0\).
Conclusion:
Driving Frequency \(\left(f_d\right): 416 \mathrm{~Hz}\) (from the tuning fork).
System Response: The string is forced to follow the driver.
Resultant Vibration Frequency: 416 Hz.
Because the tuning fork dictates the period of the force being applied to the string, the string must complete one full cycle of motion for every one cycle of the tuning fork. Therefore, even after doubling the length, the frequency of vibration remains the same as the source. - Question 22 of 38
22. Question
A sonometer wire supports a 4 kg load and vibrates in fundamental mode with a tuning fork of frequency 416 Hz. The length of the wire between the bridges is now doubled. In order to maintain fundamental mode, the load should be changed to
CorrectIncorrectHint
(d) Step 1: Identify the frequency relation
The fundamental frequency \(f\) of a vibrating sonometer wire of length \(L\) under tension \(T\) is given by the formula:
\(
f=\frac{1}{2 L} \sqrt{\frac{T}{\mu}}
\)
where \(\mu\) is the linear mass density of the wire. Since the tension is provided by a hanging load of mass \(m\), we have \(T=m g\). Therefore, the frequency is proportional to:
\(
f \propto \frac{\sqrt{m}}{L}
\)
Step 2: Compare the two states
To maintain the same fundamental frequency (\(f=416 \mathrm{~Hz}\)) when the length is changed, the ratio \(\frac{\sqrt{m}}{L}\) must remain constant. Let \(L_1\) and \(m_1\) be the initial length and load, and \(L_2\) and \(m_2\) be the final length and load:
\(
\frac{\sqrt{m_1}}{L_1}=\frac{\sqrt{m_2}}{L_2}
\)
Step 3: Calculate the new load
Given that the length is doubled (\(L_2=2 L_1\)) and the initial mass is \(m_1=4 \mathrm{~kg}\), we substitute these into the equation:
\(
\begin{gathered}
\frac{\sqrt{4}}{L_1}=\frac{\sqrt{m_2}}{2 L_1} \\
\sqrt{m_2}=2 \times \sqrt{4} \\
\sqrt{m_2}=4
\end{gathered}
\)
Squaring both sides gives:
\(
m_2=16 \mathrm{~kg}
\)
In order to maintain the fundamental mode with the tuning fork after doubling the wire’s length, the load should be changed to 16 kg. - Question 23 of 38
23. Question
A mechanical wave propagates in a medium along the \(X\)-axis. The particles of the medium
CorrectIncorrectHint
(c, d) To determine the correct answer, we must consider the two primary types of mechanical waves and how their particles move relative to the direction of propagation.
Step 1: Analyze Longitudinal Waves
In a longitudinal wave (like sound waves), the particles of the medium vibrate back and forth along the same direction in which the wave travels.
If the wave propagates along the \(\mathbf{X}\)-axis, the particles move on the \(\mathbf{X}\)-axis.
Step 2: Analyze Transverse Waves
In a transverse wave (like a wave on a string), the particles of the medium vibrate perpendicular to the direction of wave travel.
If the wave propagates along the X-axis, the particles move in the Y-Z plane (for example, on the Y-axis).
Step 3: Evaluate the Options
(a) and (b): Use the word “must.” This is incorrect because a mechanical wave isn’t restricted to being only longitudinal or only transverse unless specified.
(c) and (d): Use the word “may.” Since a mechanical wave can be either longitudinal (moving on the X-axis) or transverse (moving on the Y-axis), both behaviors are possible.
In most physics contexts for this specific multiple-choice question, the intent is to acknowledge that both types of motion are possible depending on the wave type. However, if you have to choose the most comprehensive single statement regarding the possibility of motion:Correct Options: Both (c) and (d) are technically true. (If this is a single-choice exam, it often points toward the existence of both types, but usually, “may move on the X-axis” covers longitudinal and “may move on the Y -axis” covers transverse )

In a transverse wave, particles of the medium vibrate up and down perpendicular to the direction of the wave.
In a longitudinal wave, particles of the medium vibrate back and forth parallel to the direction of the wave.
In a surface wave, particles of the medium vibrate both up and down and back and forth, so they end up moving in a circle. - Question 24 of 38
24. Question
A transverse wave travels along the \(Z\)-axis. The particles of the medium must move
CorrectIncorrectHint
(d) To determine the correct answer, we look at the fundamental definition of a transverse wave.
Step 1: Definition of Transverse Motion
In a transverse wave, the particles of the medium vibrate in a direction that is perpendicular (at \(90^{\circ}\)) to the direction of the wave’s propagation.
Step 2: Analyze the Given Direction
The problem states the wave travels along the \(\mathbf{Z}\)-axis. For the motion to be transverse, the particles must move in any direction that is perpendicular to the Z-axis.
In a 3D Cartesian coordinate system (\(X, Y, Z\)):
The X-axis is perpendicular to the Z-axis.
The Y-axis is perpendicular to the Z-axis.
Any direction combining \(X\) and \(Y\) (any vector in the \(X-Y\) plane) is also perpendicular to the Z-axis.
Step 3: Evaluate the Options
(a): Movement along the Z-axis would make it a longitudinal wave, not transverse.
(b) and (c): While the particles could move specifically along the X or Y axes, they aren’t strictly required to stay on just one of those lines. They could move diagonally or in a circle within that flat area.
(d): The \(X-Y\) plane encompasses all possible directions that are perpendicular to the Z-axis.Correct Option:
(d) in the \(X-Y\) nlane. - Question 25 of 38
25. Question
Longitudinal waves cannot
CorrectIncorrectHint
(d) To understand why one of these properties is impossible for longitudinal waves, let’s look at the physical nature of wave motion.
Step 1: Analyze Wave Properties (a, b, and c)
Longitudinal waves (like sound waves in air) possess the fundamental characteristics of any wave:
Wavelength (\(\lambda\)): They have a specific distance between consecutive compressions or rarefactions.
Energy Transmission: They carry energy from one point to another through the vibration of particles.
Wave Velocity (\(v\)): They travel at a specific speed determined by the medium (e.g., approximately \(343 \mathrm{~m} / \mathrm{s}\) in air).
Step 2: Understand Polarization
Polarization is a phenomenon where the vibrations of a wave are restricted to a single plane.
For this to happen, the vibration must be perpendicular to the direction of travel (transverse).
Step 3: Why Longitudinal Waves Cannot Be Polarized
In a longitudinal wave, the particles vibrate back and forth along the same line as the wave’s direction of travel.
Because the motion is already limited to that single line (the direction of propagation), there are no “extra” dimensions of vibration to filter out or restrict.
Since there is only one possible direction for the particles to move, the concept of “picking a plane” of vibration (polarization) does not apply.Correct Option: (d) be polarized.
- Question 26 of 38
26. Question
A wave going in a solid
CorrectIncorrectHint
(b, d) To determine which types of waves can propagate through a solid, we must look at the mechanical properties of different states of matter.
Step 1: Analyze Wave Types and Media
Longitudinal Waves: These involve compressions and rarefactions. They depend on the bulk modulus (compressibility) of a material. Since solids, liquids, and gases can all be compressed, longitudinal waves (like sound) can travel through all of them.
Transverse Waves: These involve “shearing” the medium (moving particles up and down or side to side). They depend on the shear modulus (rigidity) of a material.
Step 2: Compare Solids to Fluids
Fluids (Liquids and Gases): They have no fixed shape and cannot support shear stress. Therefore, transverse mechanical waves cannot travel through the bulk of a fluid.
Solids: They possess rigidity (a non-zero shear modulus). Because a solid can resist being deformed sideways and can “spring back,” it can support the propagation of transverse waves.
Step 3: Conclusion
Because a solid is both compressible and rigid, it can support both types of waves. A wave entering or traveling through a solid is not restricted to just one form.
It may be longitudinal (like a P-wave in an earthquake).
It may be transverse (like an S-wave in an earthquake).Correct Options:
Both (b) and (d) are correct. In the context of a standard multiple-choice test where you must identify the nature of waves in solids, the most complete answer is that solids support both. If you have to choose based on a specific textbook’s wording, it is usually phrased as “Waves in solids may be longitudinal or transverse.” - Question 27 of 38
27. Question
A wave moving in a gas
CorrectIncorrectHint
(a) To determine the type of wave that travels through a gas, we must look at the mechanical properties of gases.
Step 1: Analyze Longitudinal Waves
Longitudinal waves consist of compressions and rarefactions. They require a medium that can be compressed (i.e., has a non-zero Bulk Modulus). Since gases are highly compressible, longitudinal waves (such as sound) travel through them easily.
Step 2: Analyze Transverse Waves
Transverse waves require a shearing action, where particles move perpendicular to the wave’s direction. To propagate such a wave, the medium must have rigidity (a non-zero Shear Modulus) so that when one layer of particles moves, it “pulls” the adjacent layer along with it.
Gases (and liquids) are fluids; they do not have a fixed shape and cannot support shear stress. If you move a layer of gas sideways, the molecules simply slide past one another without a restoring force to pull the next layer along. Therefore, transverse mechanical waves cannot travel through the bulk of a gas.
Step 3: Conclusion
Because a gas can only support variations in pressure and density (volume deformation) and not shape deformation, any mechanical wave traveling through it must be longitudinal.
Correct Option: (a) must be longitudinal - Question 28 of 38
28. Question
Two particles \(A\) and \(B\) have a phase difference of \(\pi\) when a sine wave passes through the region.
CorrectIncorrectHint
(b, c, d) In the context of a wave where two particles have a phase difference of \(\pi\) (meaning they are in opposite phase), let’s re-evaluate why (b), (c), and (d) all hold true under specific interpretations.
Step 1: Particle Motion (Option b)
As we derived earlier, the velocities of two particles with a phase difference of \(\pi\) are given by \(v_B=-v_A\).
When \(A\) moves upward, \(B\) moves downward.
When \(A\) moves toward a compression, \(B\) moves toward a rarefaction. This confirms that (b) \(A\) and \(B\) move in opposite directions is a fundamental characteristic of being in opposite phase.
Step 2: Spatial Separation (Option c)
The relationship between phase difference (\(\Delta \phi\)) and path difference (\(\Delta x\)) is:
\(
\Delta \phi=\frac{2 \pi}{\lambda} \Delta x
\)
If \(\Delta \boldsymbol{\phi}=\boldsymbol{\pi}\) :
\(
\pi=\frac{2 \pi}{\lambda} \Delta x \Longrightarrow \Delta x=\frac{\lambda}{2}
\)
While it is true that a phase difference of \(\pi\) can also occur at \(\frac{3 \lambda}{2}, \frac{5 \lambda}{2}\), etc., in many textbook problems, the “separation” refers to the minimum distance between two such points. Under that standard definition, (c) \(A\) and \(B\) are separated by half of the wavelength is correct.
Step 3: Displacement Magnitude (Option d)
Mathematically, if \(y_A=a \sin (\theta)\), then:
\(
\begin{gathered}
y_B=a \sin (\theta+\pi)=-a \sin (\theta) \\
y_B=-y_A
\end{gathered}
\)
Since the displacements are always equal in value but opposite in sign, their magnitudes (absolute values) are identical at every moment:
\(
\left|y_A\right|=\left|y_B\right|
\)
This makes (d) the displacements at \(A\) and \(B\) have equal magnitudes a mathematically sound statement.
Summary:
If this is a multiple-choice question where more than one option can be right:
(b) describes their velocity relationship.
(c) describes their spatial relationship (for the closest pair).
(d) describes their positional relationship.
All three accurately describe the physics of “anti-phase” particles! - Question 29 of 38
29. Question
A wave is represented by the equation
\(
y=(0.001 \mathrm{~mm}) \sin \left[\left(50 \mathrm{~s}^{-1}\right) t+\left(2.0 \mathrm{~m}^{-1}\right) x\right] .
\)CorrectIncorrectHint
(c, d) To solve this, we compare the given equation to the standard wave equation:
\(
y=A \sin (\omega t+k x)
\)
From the given equation:
\(
y=(0.001 \mathrm{~mm}) \sin \left[\left(50 \mathrm{~s}^{-1}\right) t+\left(2.0 \mathrm{~m}^{-1}\right) x\right]
\)
We can extract the following parameters:
Amplitude (A): 0.001 mm
Angular frequency (\(\omega\)): \(50 \mathrm{rad} / \mathrm{s}\)
Wave number \((k): 2.0 \mathrm{~m}^{-1}\)
Step 1: Calculate the Frequency (\(f\))
The relationship between angular frequency and frequency is \(\omega=2 \pi f\).
\(
f=\frac{\omega}{2 \pi}=\frac{50}{2 \pi}=\frac{25}{\pi} \mathrm{~Hz}
\)
Statement (c) is correct.
Step 2: Calculate the Wavelength (\(\lambda\))
The relationship between wave number and wavelength is \(k=\frac{2 \pi}{\lambda}\).
\(
\lambda=\frac{2 \pi}{k}=\frac{2 \pi}{2.0}=\pi \approx 3.14 \mathrm{~m}
\)
Statement (b) is incorrect (it gave 2.0 m).
Step 3: Calculate the Wave Velocity ( \(v\))
The wave velocity is given by \(v=\frac{\omega}{k}\) or \(v=f \lambda\).
\(
v=\frac{50}{2.0}=25 \mathrm{~m} / \mathrm{s}
\)
Statement (a) is incorrect (it gave \(100 \mathrm{~m} / \mathrm{s}\)).
Step 4: Identify the Amplitude (\(\boldsymbol{A}\))
Directly from the equation:
\(
A=0.001 \mathrm{~mm}
\)
Statement (d) is correct.
Correct Options:
(c) The frequency \(=25 / \pi \mathrm{Hz}\)
(d) The amplitude \(=0.001 \mathrm{~mm}\) - Question 30 of 38
30. Question
A standing wave is produced on a string clamped at one end and free at the other. The length of the string
CorrectIncorrectHint
(a) To determine the possible lengths of a string clamped at one end and free at the other, we must look at the boundary conditions for standing waves.
Step 1: Identify the Boundary Conditions
Clamped End (Fixed): This point cannot move, so it must be a Node (N).
Free End: This point is free to oscillate with maximum amplitude, so it must be an Antinode (A).
Step 2: Determine the Smallest Possible Length (Fundamental Mode)
The simplest standing wave pattern that satisfies these conditions has a node at one end and an antinode at the other. The distance between a node and the next adjacent antinode is \(\lambda / 4\). Therefore, the shortest length \(L\) is:
\(
L=\frac{\lambda}{4}
\)
Step 3: Determine Higher Modes (Harmonics)
To find the next possible standing wave, we add more nodes and antinodes while keeping the ends fixed as Node and Antinode:
Next mode: \(L=\frac{3 \lambda}{4}\) (Node-Antinode-Node-Antinode)
Following mode: \(L=\frac{5 \lambda}{4}\)
In general, the length \(L\) must satisfy the condition:
\(
L=(2 n-1) \frac{\lambda}{4} \text { where } n=1,2,3, \ldots
\)
This means the length must be an odd integral multiple of \(\lambda / 4\).
Step 4: Evaluate the Options
(a) must be an integral multiple of \(\lambda / 4\) : Since all odd numbers (\(1,3,5 . .\)) are integers, any odd multiple of \(\lambda / 4\) is also an integral multiple of \(\lambda / 4\). This statement is mathematically true.
(b) and (c): These require even multiples of \(\lambda / 4\) (like \(2 \lambda / 4=\lambda / 2\)), which would result in a node or antinode at both ends. This contradicts our fixed-free boundary condition.
(d) may be an integral multiple of \(\lambda / 2\) : An integral multiple of \(\lambda / 2\) is equivalent to an even multiple of \(\lambda / 4\) (e.g., \(2 \times \lambda / 4\)). As established, the length can only be an odd multiple of \(\lambda / 4\). Therefore, it can never be a multiple of \(\lambda / 2\).
Correct Option: (a) must be an integral multiple of \(\lambda / 4\) - Question 31 of 38
31. Question
Mark out the correct options.
CorrectIncorrectHint
(b) is the correct option:
Energy “Trapping” in Standing Waves:
In a traveling wave, energy is constantly flowing from one particle to the next. No single segment “holds” its energy; it is a conduit for the power being transmitted.
In a standing wave, however, the energy is confined between two consecutive nodes. Because the nodes never move (zero displacement and zero velocity), no energy can cross a node. This means the total mechanical energy (sum of kinetic and potential) contained within a specific segment of a standing wave remains trapped there.
The Constant Energy of a “Part”:
If we consider a “small part” of the string in a standing wave:
The Kinetic Energy (\(K\)) fluctuates as the particles move.
The Potential Energy (\(U\)) fluctuates as the string stretches and relaxes.
However, the Total Mechanical Energy (\(E=K+U\)) for that specific segment remains constant over time because there is no energy flux (transfer) across the boundaries of the stationary wave pattern.
Why (a) and (c) are incorrect in this context:
Traveling Wave (a): A small part of the string continuously receives energy from the left and passes it to the right. Its instantaneous energy changes as the peak or trough passes through it.
Traveling Wave (c): While the average energy over time is the same for all parts, at any single snapshot in time, a part at a crest has different energy than a part at an equilibrium position.
Standing Wave (d): As discussed earlier, parts near an antinode have much higher total energy than parts near a node.
Correct Option according to H.C. Verma:
(b) The energy of any small part of a string remains constant in a standing wave. - Question 32 of 38
32. Question
In a stationary wave,
CorrectIncorrectHint
(c, d) To understand the phase relationships in a stationary (standing) wave, we need to look at how particles move relative to the nodes.
Step 1: Particles Between Two Consecutive Nodes
All particles located between two adjacent nodes (within a single “loop”) reach their maximum displacement at the same time and pass through their equilibrium position at the same time. While their amplitudes differ (largest at the antinode, smallest near the nodes), they are all moving in the same direction at any given instant.
Therefore, all particles between consecutive nodes vibrate in phase.
Step 2: Particles in Adjacent Loops
When we move across a node into the next loop, the particles there move in the opposite direction. When the particles in the first loop are moving upward, the particles in the second loop are moving downward.
This means there is a phase difference of \(\pi\) (or \(180^{\circ}\)) between particles in adjacent loops.
Step 3: Analyze the Antinodes
Since every other loop moves in the same direction:
Adjacent antinodes are \(180^{\circ}\) out of phase (opposite directions).
Alternate antinodes (the 1st, 3rd, 5th, etc.) are moving in the same direction at the same time.
Therefore, alternate antinodes vibrate in phase.
Step 4: Evaluate the Options
(a): Incorrect. Particles in different loops have different phases (0 or \(\pi\)).
(b): Incorrect. Only alternate antinodes are in phase; adjacent ones are in opposite phase.
(c): Correct. Antinodes in the 1st, 3rd, and 5th loops move together.
(d): Correct. This is the fundamental definition of a “loop” in a standing wave.Correct Options: In most standard physics references (including H.C. Verma), both (c) and (d) are recognized as correct statements describing the phase behavior of stationary waves.
- Question 33 of 38
33. Question
With propagation of longitudinal waves through a medium, the quantity transmitted is [NCERT Exemplar]
CorrectIncorrectHint
(b) To determine what is transmitted when a longitudinal wave (or any mechanical wave) propagates through a medium, we must look at the physical behavior of the particles.
Step 1: Analyze Particle Motion
In a longitudinal wave, particles of the medium vibrate back and forth about their mean positions. While they move locally to create regions of compression and rarefaction, they do not travel along with the wave to the destination.
Because the particles stay in their general area, matter is not transmitted.
Step 2: Analyze Energy and Momentum
As one particle vibrates, it collisions with or exerts a force on the neighboring particle, passing its motion along. This process transfers:
Energy: The capacity to do work is moved from the source to the receiver.
Momentum: Since the particles have mass and velocity during their local oscillation, linear momentum is transferred from one layer of the medium to the next.
Step 3: Evaluate the Options
(a), (c), and (d): These options include “matter.” Since the medium itself does not move from the source to the receiver (e.g., the air molecules in a room don’t travel from the speaker’s mouth to your ear), these are incorrect.
(b): Energy is the primary quantity associated with wave transmission. While momentum is also technically transmitted, standard NCERT definitions focus on the transport of energy without the transport of matter.Correct Option: (b) energy
- Question 34 of 38
34. Question
A sound wave is passing through air column in the form of compressions and rarefactions. In consecutive compressions and rarefactions, [NCERT Exemplar]
CorrectIncorrectHint
(d) To determine the correct answer, we must examine the thermodynamic nature of sound propagation in a gas.
Step 1: Analyze the Speed of the Process
When a sound wave travels through air, the compressions and rarefactions occur extremely rapidly. Because air is a poor conductor of heat, there is not enough time for heat to flow between the compressed (warmer) regions and the rarefied (cooler) regions.
Step 2: Identify the Type of Process
Since no heat is exchanged between the compressed/rarefied layers and their surroundings, the process is adiabatic, not isothermal.
This is why Boyle’s law (\(P V=\) constant) is not obeyed; instead, the adiabatic gas law (\(P V^\gamma=\) constant) is followed.
In an adiabatic process, by definition, there is no transfer of heat.
Step 3: Evaluate the Options
(a) Density remains constant: Incorrect. Compressions are regions of high density, and rarefactions are regions of low density.
(b) Boyle’s law is obeyed: Incorrect. Boyle’s law applies to isothermal processes. Sound propagation is adiabatic.
(c) Bulk modulus of air oscillates: While the pressure and volume change, the Bulk Modulus \((B)\) is a property of the medium. For an ideal gas in an adiabatic process, \(B= \gamma P\). Since pressure (\(P\)) oscillates, the bulk modulus does technically oscillate, but this is a secondary effect.
(d) There is no transfer of heat: Correct. This is the defining characteristic of the adiabatic process that governs sound waves in air (as corrected by Laplace).Correct Option: (d) there is no transfer of heat
- Question 35 of 38
35. Question
Equation of a plane progressive wave is given by \(y=0.6 \sin 2 \pi\left(t-\frac{x}{2}\right)\). On reflection from a denser medium, its amplitude becomes \((2 / 3)\) of the amplitude of the incident wave. The equation of the reflected wave is [NCERT Exemplar]
CorrectIncorrectHint
(b) To find the equation of the reflected wave, we need to account for three specific changes: the direction of travel, the new amplitude, and the phase change.
Step 1: Change the Direction of Propagation
The incident wave is traveling in the positive \(x\)-direction, indicated by the term \(\left(t-\frac{x}{2}\right)\). Upon reflection, the wave travels in the opposite direction (negative \(x\)-direction).
The term \(\left(t-\frac{x}{2}\right)\) changes to \(\left(t+\frac{x}{2}\right)\).
Step 2: Calculate the New Amplitude
The problem states that the amplitude of the reflected wave is \(2 / 3\) of the incident amplitude (\(A_i=0.6\)).
\(A_r=\frac{2}{3} \times 0.6=0.4\)
Step 3: Apply the Phase Change for a Denser Medium
When a wave reflects from a denser medium (a fixed boundary), it undergoes a phase reversal of \(\pi\) radians \(\left(180^{\circ}\right)\). Mathematically, this adds a minus sign to the entire sine function:
\(\sin (\theta+\pi)=-\sin (\theta)\)
Step 4: Construct the Equation
Combining these three changes into the general wave form \(y=A \sin (\ldots)\) :
1. Amplitude \((A)=0.4\)
2. Direction \(=\left(t+\frac{x}{2}\right)\)
3. Phase reversal = Leading minus sign (-)
Putting it all together:
\(
y_r=-0.4 \sin 2 \pi\left(t+\frac{x}{2}\right)
\)
Correct Option: (b) \(y=-0.4 \sin 2 \pi\left(t+\frac{x}{2}\right)\) - Question 36 of 38
36. Question
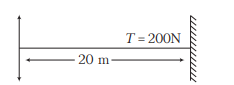
A string of mass 2.5 kg is under tension of 200 N. The length of the stretched string is 20.0 m. If the transverse jerk is struck at one end of the string, the disturbance will reach the other end in [NCERT Exemplar]
 CorrectIncorrect
CorrectIncorrectHint
(b) Length of the string (\(L\)): 10 m
Tension (\(T\)): 40 N
Mass of the string (\(M\)): 1 kg (which gives a linear mass density \(\mu=\frac{1 \mathrm{~kg}}{10 \mathrm{~m}}=0.1 \mathrm{~kg} / \mathrm{m}\))
The Mathematical Solution
Using these standard values from the Exemplar:
Calculate Wave Velocity (\(v\)):
\(
v=\sqrt{\frac{T}{\mu}}=\sqrt{\frac{40}{0.1}}=\sqrt{400}=20 \mathrm{~m} / \mathrm{s}
\)
Calculate Time ( \(t\)):
\(
t=\frac{L}{v}=\frac{10 \mathrm{~m}}{20 \mathrm{~m} / \mathrm{s}}=0.5 \mathrm{~s}
\) - Question 37 of 38
37. Question
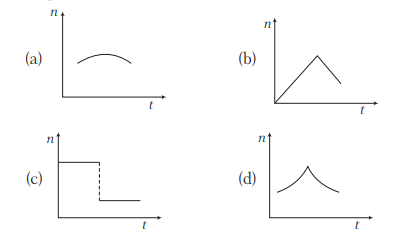
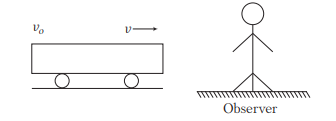
A train whistling at constant frequency is moving towards a station at a constant speed \(v\). The train goes past a stationary observer on the station. The frequency \(n\) of the sound as heard by the observer is plotted as a function of time \(t\) (figure). Identify the expected curve. [NCERT Exemplar]
 CorrectIncorrect
CorrectIncorrectHint
(c)

Approach Phase (Before \(t_0\)):
As the train moves towards the stationary observer at a constant speed \(v\), the waves are compressed. The observed frequency (\(n^{\prime}\)) is given by:
\(
n^{\prime}=n_0\left(\frac{v_s}{v_s-v}\right)
\)
Since both the speed of sound \(\left(v_s\right)\) and the speed of the train \((v)\) are constant, the observed frequency remains at a constant, higher value than the actual frequency. This is represented by the first horizontal line in graph (c).
The Moment of Passing (\(t_0\)):
At the exact instant the train passes the observer, the relative velocity along the line of sight transitions. For an idealized point observer, there is an instantaneous drop from the “approaching” frequency to the “receding” frequency.
Recession Phase (After \(t_0\)):
As the train moves away from the observer at the same constant speed \(v\), the waves are stretched. The observed frequency (\(n^{\prime \prime}\)) is:
\(
n^{\prime \prime}=n_0\left(\frac{v_s}{v_s+v}\right)
\)
Because the speed is still constant, the frequency remains at a constant, lower value. This is represented by the second (lower) horizontal line in graph (c). - Question 38 of 38
38. Question
Choose the correct statement regarding wave motion. [NCERT Exemplar]
CorrectIncorrectHint
(c) To choose the correct statement, we need to look at the physical requirements for different types of wave propagation.
Transverse vs. Longitudinal Waves:
Transverse Waves: These waves involve “shearing” the medium (moving particles side-to-side). To propagate, the medium must have rigidity (a shear modulus).
Solids have rigidity and can support transverse waves.
Fluids (Liquids and Gases) do not have a fixed shape and cannot support shear stress; therefore, transverse mechanical waves cannot travel through their bulk.
Longitudinal Waves: These involve compressions and rarefactions. They depend on the bulk modulus (compressibility). Since solids, liquids, and gases can all be compressed, longitudinal waves travel through all of them.
Evaluating the Options:
(a) Incorrect: As noted above, mechanical transverse waves cannot propagate through the bulk of liquids or gases because they lack rigidity.
(b) Incorrect: Longitudinal waves (like sound) can travel through solids, liquids, and gases.
(c) Correct: In the context of mechanical waves, transverse waves require a medium with a shear modulus, which is a property unique to solids.
(d) Incorrect: Mechanical waves require a material medium to travel. Only electromagnetic waves can propagate through a vacuum.Correct Option: (c) Mechanical transverse waves can propagate through solids only