Conceptual PCQs
- Aristotle’s view that a force is necessary to keep a body in uniform motion is wrong. A force is necessary in practice to counter the opposing force of friction.
- Galileo extrapolated simple observations on motion of bodies on inclined planes, and arrived at the law of inertia. Newton’s first law of motion is the same law rephrased thus: “Everybody continues to be in its state of rest or of uniform motion in a straight line, unless compelled by some external force to act otherwise”. In simple terms, the First Law is “If external force on a body is zero, its acceleration is zero”.
- Momentum ( \(\mathbf{p}\) ) of a body is the product of its mass ( \(m\) ) and velocity ( \(\boldsymbol{v}\) ) :
\(
\mathbf{p}=m \boldsymbol{v}
\) - Newton’s second law of motion :
The rate of change of momentum of a body is proportional to the applied force and takes place in the direction in which the force acts. Thus
\(
\mathbf{F}=k \frac{\mathrm{~d} \mathbf{p}}{\mathrm{~d} t}=k m \mathbf{a}
\)
where \(\mathbf{F}\) is the net external force on the body and \(\mathbf{a}\) its acceleration. We set the constant of proportionality \(k=1\) in S.I. Then
\(
\mathbf{F}=\frac{\mathrm{d} \mathbf{p}}{\mathrm{~d} t}=m \mathbf{a}
\)
The SI unit of force is newton : \(1 \mathrm{~N}=1 \mathrm{~kg} \mathrm{~m} \mathrm{~s}^{-2}\).
(a) The second law is consistent with the First Law ( \(\mathbf{F}=0\) implies \(\mathbf{a}=0\) )
(b) It is a vector equation
(c) It is applicable to a particle, and also to a body or a system of particles, provided \(\mathbf{F}\) is the total external force on the system and \(\mathbf{a}\) is the acceleration of the system as a whole.
(d) \(\mathbf{F}\) at a point at a certain instant determines \(\mathbf{a}\) at the same point at that instant. That is the Second Law is a local law; a at an instant does not depend on the history of motion. - Impulse is the product of force and time which equals change in momentum. The notion of impulse is useful when a large force acts for a short time to produce a measurable change in momentum. Since the time of action of the force is very short, one can assume that there is no appreciable change in the position of the body during the action of the impulsive force.
- Newton’s third law of motion:
To every action, there is always an equal and opposite reaction
In simple terms, the law can be stated thus:
Forces in nature always occur between pairs of bodies. Force on a body \(A\) by body \(B\) is equal and opposite to the force on the body \(B\) by \(A\).
Action and reaction forces are simultaneous forces. There is no cause-effect relation between action and reaction. Any of the two mutual forces can be called action and the other reaction. Action and reaction act on different bodies and so they cannot be cancelled out. The internal action and reaction forces between different parts of a body do, however, sum to zero. - Law of Conservation of Momentum:
The total momentum of an isolated system of particles is conserved. The law follows from the second and third law of motion. - Friction:
Frictional force opposes (impending or actual) relative motion between two surfaces in contact. It is the component of the contact force along the common tangent to the surface in contact. Static friction \(f_s\) opposes impending relative motion; kinetic friction \(f_k\) opposes actual relative motion. They are independent of the area of contact and satisfy the following approximate laws:
\(
\begin{aligned}
& f_s \leq\left(f_s\right)_{\max }=\mu_s N \\
& f_{\mathrm{k}}=\mu_{\mathrm{k}} N
\end{aligned}
\)
\(\mu_s\) (co-efficient of static friction) and \(\mu_k\) (co-efficient of kinetic friction) are constants characteristic of the pair of surfaces in contact. It is found experimentally that \(\mu_k\) is less than \(\mu_s\).
Quiz Summary
0 of 61 Questions completed
Questions:
Information
You have already completed the quiz before. Hence you can not start it again.
Quiz is loading…
You must sign in or sign up to start the quiz.
You must first complete the following:
Results
Results
0 of 61 Questions answered correctly
Your time:
Time has elapsed
You have reached 0 of 0 point(s), (0)
Earned Point(s): 0 of 0, (0)
0 Essay(s) Pending (Possible Point(s): 0)
Categories
- Not categorized 0%
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- Current
- Review
- Answered
- Correct
- Incorrect
- Question 1 of 61
1. Question
A body of weight \(w_1\) is suspended from the ceiling of a room through a chain of weight \(w_2\). The ceiling pulls the chain by a force
CorrectIncorrectHint
(c) Explanation
To find the force the ceiling exerts on the chain, we consider the entire system consisting of the body and the chain.
Identify the forces acting on the system: The system is in equilibrium, meaning the net force is zero.
Downward forces: The total downward force is the sum of the weights of the body and the chain, which is \(w_1+w_2\).
Upward forces: The only upward force is the tension force exerted by the ceiling on the chain.
Apply the condition for equilibrium: For the system to be stationary, the upward force must balance the total downward force. Therefore, the force the ceiling pulls the chain with must be equal to the combined weight of the body and the chain.
The force the ceiling pulls the chain with is \(\mathbf{w}_{\mathbf{1}}+\mathbf{w}_{\mathbf{2}}\). - Question 2 of 61
2. Question
When a horse pulls a cart, the force that helps the horse to move forward is the force exerted by
CorrectIncorrectHint
(b) The force that helps the horse move forward when pulling a cart is the force exerted by (b) the ground on the horse.
Explanation: When the horse pushes against the ground with its hooves, the ground pushes back on the horse with an equal and opposite force, propelling the horse forward.
Why other options are incorrect:
(a) the cart on the horse: While the cart does exert a force on the horse (due to Newton’s Third Law), this force is backward and actually resists the horse’s forward motion.
(c) the ground on the cart: The ground directly interacts with the horse’s hooves, not the cart.
(d) the horse on the ground: This is essentially the same as option (a), describing the horse’s action on the ground rather than the ground’s reaction on the horse. - Question 3 of 61
3. Question
A car accelerates on a horizontal road due to the force exerted by
CorrectIncorrectHint
(d) The correct answer is the road.
Explanation:
When a car accelerates, the force that actually propels it forward is the friction force exerted by the road on the car’s tires. The engine generates power, but this power is transmitted to the wheels, which then push against the road. In response, the road exerts an equal and opposite force on the wheels, pushing the car forward.Why other options are incorrect:
(a) the engine of the car: While the engine provides the power to rotate the wheels, it is the road’s reaction force that actually moves the car forward.
(b) the driver of the car: The driver controls the car’s acceleration by steering and applying the gas pedal, but they don’t directly exert the force that propels the car forward.
(c) the earth: Although the earth’s gravitational pull keeps the car on the road, it is not the primary force driving the car’s forward acceleration. The friction force between the tires and the road is the key factor. - Question 4 of 61
4. Question
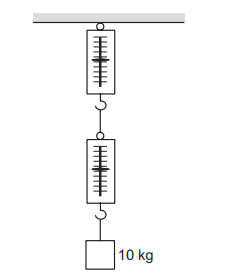
A block of mass 10 kg is suspended through two light spring balances as shown in figure below.
 CorrectIncorrect
CorrectIncorrectHint
Assuming the problem is: “A block of mass 10 kg is suspended through two light spring balances, one hanging from the other.”
(a) Both scales will read 10 kg.
Step 1: Analyze the forces on the lower scale
The lower spring balance is directly supporting the 10 kg mass. The tension force in the spring of this balance must be equal to the weight of the mass to keep it in equilibrium. The reading on a spring scale indicates this tension. Therefore, the lower scale will read 10 kg.Step 2: Analyze the forces on the upper scale
The upper spring balance is supporting everything below it: the lower balance and the 10 kg mass. Since the spring balances are described as “light,” their own mass is considered negligible. The total downward force on the upper balance is the weight of the 10 kg mass. Therefore, the upper scale will also read 10 kg.Answer: Based on the principle of forces in a series system, the tension is the same throughout the supporting structure. Therefore, the correct option is (a) Both the scales will read 10 kg.
- Question 5 of 61
5. Question
A block of mass \(m\) is placed on a smooth inclined plane of inclination \(\theta\) with the horizontal. The force exerted by the plane on the block has a magnitude
CorrectIncorrectHint
(c) \(\boldsymbol{m} \mathbf{g} \boldsymbol{\operatorname { c o s }} \boldsymbol{\theta}\). The force exerted by the plane on the block is the normal force, which is the component of the gravitational force ( \(m g\) ) perpendicular to the plane, given by \(m g \cos \theta\).
- Question 6 of 61
6. Question
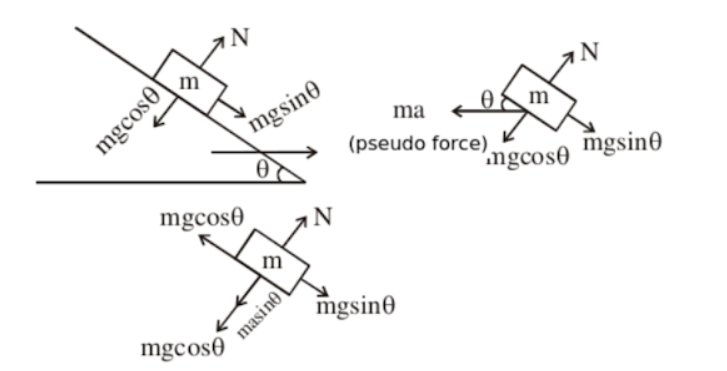
A block of mass \(m\) is placed on a smooth wedge of inclination \(\theta\). The whole system is accelerated horizontally so that the block does not slip on the wedge. The force exerted by the wedge on the block has a magnitude
CorrectIncorrectHint
(b) \(m g / \cos \theta\). When the system is accelerated horizontally such that the block does not slip, a pseudo force acts on the block. By analyzing the forces in the frame of reference of the block, the normal force exerted by the wedge on the block is equal to the vector sum of the gravitational force and the pseudo force. This results in the magnitude of the normal force being \(m g / \cos \theta\).

Free-body Diagram of the Small Block of Mass ‘ \(m\) ‘.
The block is at equilibrium w.r.t. to wedge. Therefore,
\(
\begin{aligned}
& m g \sin \theta=m a \cos \theta \\
& \Rightarrow a=g \tan \theta
\end{aligned}
\)
Normal reaction on the block is
\(
N=m g \cos \theta+m a \sin \theta
\)
Putting the value of a, we get:
\(
\begin{aligned}
& \mathrm{N}=\mathrm{mg} \cos \theta+\mathrm{mg} \tan \theta \sin \theta \\
& N=m g \cos \theta+m g \frac{\sin \theta}{\cos \theta} \sin \theta; N=\frac{m g}{\cos \theta}
\end{aligned}
\) - Question 7 of 61
7. Question
Neglect the effect of rotation of the earth. Suppose the earth suddenly stops attracting objects placed near its surface. A person standing on the surface of the earth will
CorrectIncorrectHint
(d) If the Earth suddenly stops attracting objects placed near its surface, a person standing on the Earth will remain standing.
Explanation: When the Earth’s gravity disappears, there is no net force acting on the person, so according to Newton’s first law of motion, they will remain in their current state of rest, which is standing.
Why other options are incorrect:
(a) fly up: If the person were to fly up, there would need to be an upward force pushing them against the Earth’s gravity. Since gravity is now absent, there’s no force to propel them upwards.
(b) slip along the surface: There is no friction to cause the person to slide along the surface. The normal force that usually counteracts gravity and keeps us from sinking into the Earth is also absent, but this doesn’t necessarily mean the person will slide. They will simply float in place.
(c) fly along a tangent to the Earth’s surface: If the Earth were rotating and suddenly stopped, the person would be thrown tangent to the Earth’s surface due to their inertia. However, the question specifies neglecting the rotation of the Earth. In this scenario, there’s no tangential velocity to propel them along a tangent. - Question 8 of 61
8. Question
Three rigid rods are joined to form an equilateral triangle \(A B C\) of side 1 m. Three particles carrying charges \(20 \mu \mathrm{C}\) each are attached to the vertices of the triangle. The whole system is at rest in an inertial frame. The resultant force on the charged particle at \(A\) has the magnitude
CorrectIncorrectHint
(a) Using, \(\mathrm{F}_{\text {net }}=\mathrm{ma}\),
\(
\mathrm{a}=0 \Rightarrow \mathrm{~F}_{\mathrm{net}}=0
\)
As the whole system is at rest, the resultant force on the charged particle at A is zero. - Question 9 of 61
9. Question
A force \(F_1\) acts on a particle so as to accelerate it from rest to a velocity \(v\). The force \(F_1\) is then replaced by \(F_2\) which decelerates it to rest.
CorrectIncorrectHint
(b) \(\boldsymbol{F}_1\) may be equal to \(\boldsymbol{F}_2\). The magnitude of the forces depends on the conditions of motion and any other forces acting on the particle, such as friction or air resistance. For example, if the particle is accelerated and decelerated over the same distance and under the same conditions (like no friction), the forces could be equal. However, if different forces are present (like friction that changes with velocity), the forces will not be equal.
Case 1: \(F_1\) and \(F_2\) are equal
This can happen if the conditions are symmetrical. For example, if a force \(F_1\) accelerates a particle in a vacuum to a velocity \(v\), and then an equal force \(F_2\) ( \(F_2=F_1\) ) acts in the opposite direction to decelerate it over the same distance, the forces would be equal.
Case 2: \(F_1\) and \(F_2\) are unequal
If there are other forces acting, such as friction or air resistance, the net force is the vector sum of all forces. For example, if friction is acting, the applied force \(F_1\) must overcome both the friction and the inertia, and the decelerating force \(F_2\) must overcome the friction to stop the particle. In this case, the forces may be unequal.
Why it’s not always equal or unequal
Since the problem does not specify the conditions of motion, such as distance or the presence of friction, we cannot conclude that the forces must be equal or must be unequal. Therefore, the only correct statement is that they may be equal. - Question 10 of 61
10. Question
Two objects \(A\) and \(B\) are thrown upward simultaneously with the same speed. The mass of \(A\) is greater than the mass of \(B\). Suppose the air exerts a constant and equal force of resistance on the two bodies.
CorrectIncorrectHint
(b) Let the air exert a constant resistance force \(=\mathrm{F}\) (in downward direction).
Acceleration of particle A in downward direction due to air resistance, \(\mathrm{a}_{\mathrm{A}}=\mathrm{F} / \mathrm{m}_{\mathrm{A}}\).
Acceleration of particle \(B\) in downward direction due to air resistance, \(a_B=F / m_B\).
\(
\begin{aligned}
& \mathrm{m}_{\mathrm{A}}>\mathrm{m}_{\mathrm{B}} \\
& \mathrm{a}_{\mathrm{A}}<\mathrm{a}_{\mathrm{B}} \\
& S=u t+\frac{1}{2} a t^2 \\
& S o, H_A=u t-\frac{1}{2}\left(a_A+g\right) t^2 \\
& H_B=u t-\frac{1}{2}\left(a_B+g\right) t^2 \\
& H_A>H_B
\end{aligned}
\)
Therefore, A will go higher than B.Explanation:
\(\boldsymbol{A}\) will go higher than \(\boldsymbol{B}\).
Explanation:
When objects are thrown upwards with the same initial speed, the force of air resistance acts against their motion, slowing them down. However, this resistance is constant for both objects. Since object \(\boldsymbol{A}\) has a greater mass, the same force of air resistance has a smaller effect on its acceleration compared to object \(\boldsymbol{B}\).Why other options are incorrect:
(a) The two bodies will reach the same height: This is incorrect because the greater mass of object \(A\) leads to a smaller deceleration due to air resistance, allowing it to reach a higher height than object \(\boldsymbol{B}\).
(c) \(B\) will go higher than \(A\) : This is the opposite of what happens. The smaller mass of object \(\boldsymbol{B}\) makes it more susceptible to the effects of air resistance, causing it to reach a lower height than object \(A\).
(d) Any of the above three may happen depending on the speed with which the objects are thrown: This is incorrect because the initial speed only affects the time it takes for the objects to reach their maximum heights, not the relative heights themselves. The difference in mass and the resulting difference in air resistance are the determining factors. If the initial speed is very high, the time they spend in the air might be so short that the difference in height due to air resistance becomes negligible. However, for any finite initial speed, object \(\boldsymbol{A}\) will always reach a higher height than object \(\boldsymbol{B}\). - Question 11 of 61
11. Question
A smooth wedge \(A\) is fitted in a chamber hanging from a fixed ceiling near the earth’s surface. A block \(B\) placed at the top of the wedge takes a time \(T\) to slide down the length of the wedge. If the block is placed at the top of the wedge and the cable supporting the chamber is broken at the same instant, the block will
CorrectIncorrectHint
(c) remain at the top of the wedge. When the cable is broken, the chamber and wedge are in free fall, both accelerating downwards at \(g\), the acceleration due to gravity. Since the block is also accelerating downwards at \(g\) along with the wedge, there is no relative motion between them.
Before the cable is broken: The wedge is stationary and the block slides down due to gravity.
After the cable is broken: The entire system (wedge and block) is in free fall. Both the wedge and the block fall with the same acceleration (g).
No relative force: Because both the block and the wedge are accelerating at the same rate, there is no relative force between them, and the block will not slide down. - Question 12 of 61
12. Question
In an imaginary atmosphere, the air exerts a small force \(F\) on any particle in the direction of the particle’s motion. A particle of mass \(m\) projected upward takes a time \(t_1\) in reaching the maximum height and \(t_2\) in the return journey to the original point. Then
CorrectIncorrectHint
(b) The force exerted by the air on the particle is in the particle’s motion to help the motion to occur. We know that the direction of gravitational force is opposite to the direction of motion when a particle moves upwards. This gravitational force attracts the particle due to which speed of the particle during upward motion is reduced.
When a particle moves downwards, both gravitational force and force exerted by air act in the direction of motion, which means they support the motion. So we can say that the particle’s speed in downward motion is greater than the particle’s speed in an upward motion.
\(
s_2>s_1
\)
We also know that a particle’s travelling time is given by the ratio of the distance traveled by it and its speed. Mathematically, we can write:
\(
t=\frac{d}{s}
\)
Here t is the traveling time, \(d\) is the distance traveled, and \(s\) is the particle’s speed.
Write the expression for the traveling time of the particle for upward motion.
\(
t_1=\frac{d}{s_1} \dots(1)
\)
Write the expression for the traveling time of the given particle for downward motion.
\(
t_2=\frac{d}{s_2} \dots(2)
\)
On dividing equation (1) and equation (2), we can write:
\(
\frac{t_2}{t_1}=\frac{s_1}{s_2}
\)
We already know that \(s_2>s_1\) so \(t_1>t_2\). - Question 13 of 61
13. Question
A person standing on the floor of an elevator drops a coin. The coin reaches the floor of the elevator in a time \(t_1\) if the elevator is stationary and in time \(t_2\) if it is moving uniformly. Then
CorrectIncorrectHint
(a) When an elevator is moving uniformly, its acceleration is zero. This means the noninertial force due to the elevator’s motion is also zero.
Therefore, the acceleration of the coin relative to the elevator floor is simply the acceleration due to gravity, \(g\), regardless of whether the elevator is stationary or moving at a constant velocity.
Since the initial velocity of the coin relative to the elevator floor is zero in both cases, and the acceleration and distance are the same, the time taken for the coin to reach the floor will be the same.
Thus, \(\mathbf{t}_{\mathbf{1}}=\mathbf{t}_{\mathbf{2}}\).Concept:
Following conditions are applied in case of a lift:
(i) When the lift moves upward with acceleration \(a\)
Apparent acceleration, \(=(\mathrm{g}+\mathrm{a})\)
So, when a lift accelerates upwards, the apparent weight of the person inside it increases.
(ii) When the lift moves downwards with acceleration \(a\)
Apparent acceleration \(=(\mathrm{g}-\mathrm{a})\)
So, when a lift accelerates downwards, the apparent weight of the person inside it decreases.
(iii) When the lift is at rest or moving with uniform velocity \(v\) downward/upward.
The acceleration, \(\mathrm{a}=0\)
\(\therefore\) Apparent acceleration \(=\mathrm{g}\)
So, when a lift is at rest or moving with uniform velocity \(v\) downward/upward weight of the person inside it does not change.
From the above discussion, it is clear that if the lift is moving uniformly then there is no change in acceleration and hence all kinematic equations will be the same in all cases.
Hence time taken will be same whether the lift is at rest or moving with uniform velocity.
\(\therefore \mathrm{t}_1=\mathrm{t}_2\) - Question 14 of 61
14. Question
A free \({ }^{238} U\) nucleus kept in a train emits an alpha particle. When the train is stationary, a nucleus decays and a passenger measures that the separation between the alpha particle and the recoiling nucleus becomes \(x\) at time \(t\) after the decay. If the decay takes place while the train is moving at a uniform velocity \(v\), the distance between the alpha particle and the recoiling nucleus at a time \(t\) after the decay as measured by the passenger is
CorrectIncorrectHint
(c) The separation between the alpha particle and the recoiling nucleus as measured by the passenger remains the same, regardless of whether the train is stationary or moving at a constant velocity.
Step 1: Analyze the problem in the stationary frame
When the train is stationary, the initial momentum of the \({ }^{238} \boldsymbol{U}\) nucleus is zero. The decay results in an alpha particle and a recoiling nucleus moving in opposite directions to conserve momentum. Let the velocities of the alpha particle and the recoiling nucleus relative to the train be \(v_\alpha\) and \(v_{R n}\) respectively. The distance between them at time \(t\) is the sum of the distances each travels:
\(
x=v_\alpha t+v_{R n} t=\left(v_\alpha+v_{R n}\right) t
\)
This is the separation measured by the passenger inside the stationary train. The term ( \(v_\alpha+v_{R n}\) ) is the magnitude of the relative velocity of the two particles.
Step 2: Analyze the problem in the moving frame
When the train moves at a constant velocity \(v\), the initial velocity of the \({ }^{238} \boldsymbol{U}\) nucleus, as measured by a passenger, is still zero in the train’s reference frame. Since the train is an inertial frame of reference, the conservation of momentum still holds true in this frame exactly as it did in the stationary case. The alpha particle and the recoiling nucleus will have the same relative velocities to the train as they did when the train was at rest. The velocity of the alpha particle relative to the passenger will be \(v_{\alpha^{\prime}}\) and the velocity of the recoiling nucleus will be \(v_{R n}\) (in the opposite direction).
The passenger measures the distances traveled by the two particles relative to them. Therefore, the distance between the two particles at time \(t\) will again be the sum of their distances from the point of decay:
\(
d=v_\alpha t+v_{R n} t=\left(v_\alpha+v_{R n}\right) t
\)
This is the same expression as when the train was stationary, so the distance measured by the passenger is \(\boldsymbol{x}\). The constant velocity of the train affects the overall motion of the entire system, but it does not change the relative motion of the particles within the system as observed by a passenger in the same inertial frame.
The distance between the alpha particle and the recoiling nucleus at a time \(t\) after the decay, as measured by the passenger, is (c) \(x\). - Question 15 of 61
15. Question
A reference frame attached to the earth
CorrectIncorrectHint
(b) and (d) because a reference frame attached to the Earth cannot be an inertial frame due to both its rotation on its axis and its revolution around the Sun. An inertial frame is one that is not accelerating, and both the Earth’s rotation and its orbit are forms of acceleration.
(b) cannot be an inertial frame because the earth is revolving around the sun: The Earth is constantly changing direction as it orbits the Sun, which is a form of acceleration, making the reference frame non-inertial.
(d) cannot be an inertial frame because the earth is rotating about its axis: A frame of reference attached to a rotating object is a non-inertial frame because the velocity of points on the object is continuously changing direction, even if their speed is constant.Important concepts
Inertial frame of reference: A frame of reference in which an object at rest stays at rest and an object in motion continues in motion with a constant velocity, unless acted upon by a net external force.
Non-inertial frame of reference: A frame of reference that is accelerating (either by changing speed, direction, or both).
Acceleration: The rate of change of velocity. Since the Earth is constantly changing its velocity due to its rotation and its orbit, it is an accelerated frame of reference. - Question 16 of 61
16. Question
A particle stays at rest as seen in a frame. We can conclude that
CorrectIncorrectHint
(c, d) According to Newton’s second law which says that net force acting on the particle is equal to rate of change of momentum ( or mathematically \(\mathrm{F}=\mathrm{ma}\) ), so if a particle is at rest then \(\mathrm{F}_{\text {net }}=\mathrm{ma}=\mathrm{m} \frac{d v}{d t}=m \frac{d(0)}{d t}=m \times 0=0\)
Now, if the frame is inertial, then the resultant force on the particle is zero.
If the frame is non-inertial, vector sum of all the forces plus a pseudo force is zero.
i.e. \(\mathrm{F}_{\text {net }} \neq 0\).Note: If a particle is at rest in a frame, it means the particle has no net acceleration relative to that frame. This implies that the sum of all forces acting on the particle (the resultant force) is zero. However, the frame itself could be inertial (meaning it’s not accelerating) or non-inertial (meaning it is accelerating). In an inertial frame, a particle at rest will stay at rest due to the absence of net force. In a non-inertial frame, the particle might appear to be at rest, but this is because of the apparent forces experienced in the non-inertial frame (like pseudo-forces).
An inertial frame of reference is a non-accelerating frame where an object’s motion (rest or constant velocity) remains unchanged unless an external force acts upon it, according to Newton’s first law. A non-inertial frame of reference is one that is accelerating, meaning it requires the introduction of “fictitious forces,” such as the centrifugal or Coriolis force, to explain why objects appear to accelerate within it.
Inertial frame of reference
Definition: A frame of reference that is not accelerating; it is either at rest or moving with a constant velocity.
Principle: The laws of motion, particularly Newton’s first law, hold true in their simplest form.
Example: A person standing on the ground (as a good approximation) or a car moving at a constant speed on a straight road.Non-inertial frame of reference
Definition: A frame of reference that is accelerating.
Principle: To describe motion, fictitious forces (like centrifugal or Coriolis) must be added to account for the acceleration of the frame itself.
Example: A car that is speeding up, slowing down, or turning a corner. The Earth’s surface is also a non-inertial frame due to its rotation, which causes effects like the Coriolis effect. - Question 17 of 61
17. Question
A particle is found to be at rest when seen from a frame \(S_1\) and moving with a constant velocity when seen from another frame \(S_2\). Mark out the possible options.
CorrectIncorrectHint
(a, b)
\(S_1\) is moving with constant velocity w.r.t frame \(S_2\). So, if \(S_1\) is inertial, then \(S_2\) will be inertial and if \(S_1\) is non-inertial, then \(S_2\) will be non-inertial.
Assume one inertial frame in which particle is at rest. Let it be frame \(S_1\), and second frame \(S_2\), which is moving with constant velocity. For frame \(S_2\), particle will now be seen moving with constant velocity. So, Option A is correct.
Now assume frame \(S_1\) and frame \(S_2\) are non- inertial frames moving in same direction with same acceleration as that of particle. Now, assume at this moment, velocity of particle and frame \(S_1\) is same, so particle will be seen at rest from frame \(S_1\). Now, for same moment of time, let frame \(S_2\) have different velocity than particle, so from frame \(S_2\) particle will now be seen as moving with constant velocity. So, option B is also correct.
- Question 18 of 61
18. Question
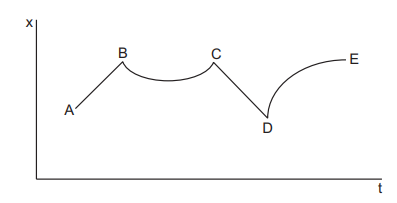
Figure below shows the displacement of a particle going along the \(X\)-axis as a function of time. The force acting on the particle is zero in the region
 CorrectIncorrect
CorrectIncorrectHint
(a, c) The force acting on the particle is zero in the regions (a) AB and (c) CD.
Explanation:
Regions AB and CD : In these regions, the displacement-time graph is a straight line, indicating constant velocity. A constant velocity means no acceleration, and therefore no net force acting on the particle.
Region BC: In this region, the graph is curved, signifying a changing velocity (acceleration). A changing velocity means a force is acting on the particle.
Region DE: This region also shows a changing velocity, meaning a force is present. - Question 19 of 61
19. Question
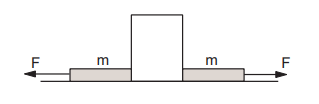
Figure below shows a heavy block kept on a frictionless surface and being pulled by two ropes of equal mass \(m\). At \(t=0\), the force on the left rope is withdrawn but the force on the right end continues to act. Let \(F_1\) and \(F_2\) be the magnitudes of the forces by the right rope and the left rope on the block respectively.
 CorrectIncorrect
CorrectIncorrectHint
(a) Before \(t=0\), the system is in equilibrium (or moving at a constant velocity), meaning the net force on the block is zero. Therefore, the force exerted by the right rope on the block ( \(F_1\) ) and the force exerted by the left rope on the block ( \(F_2\) ) were equal in magnitude to the external forces applied at the ends of the ropes, let’s call them \(\boldsymbol{F}\). So, \(F_1=F_2=F\) for \(t<0\).
At \(t=0\), the force on the left rope is withdrawn.
The external force applied to the far left end of the left rope becomes zero. Consequently, \(\boldsymbol{F}_{\mathbf{2}}=\mathbf{0}\) for \(\boldsymbol{t}>\mathbf{0}\).
The force on the right end continues to act. This force causes the entire system (block + right rope) to accelerate to the right. The force \(F_1\) is the tension in the right rope where it connects to the block. Applying Newton’s second law to the entire system (block of mass \(M\) and rope of mass \(m\) ), the acceleration is \(a=F /(M+m)\).
The force \(F_1\) must accelerate the block (mass \(M\) ), so \(F_1=M \times a=M \times F /(M+m)\). This means that \(F_1<F\) for \(t>0\) (because \(M<M+m)\).Therefore, after \(\boldsymbol{t}=\mathbf{0}\) :
\(F_1\) is the tension in the right rope at the block, which is less than the applied force \(F\) at the right end.
\(F_2\) is the tension in the left rope at the block, which drops to zero. - Question 20 of 61
20. Question
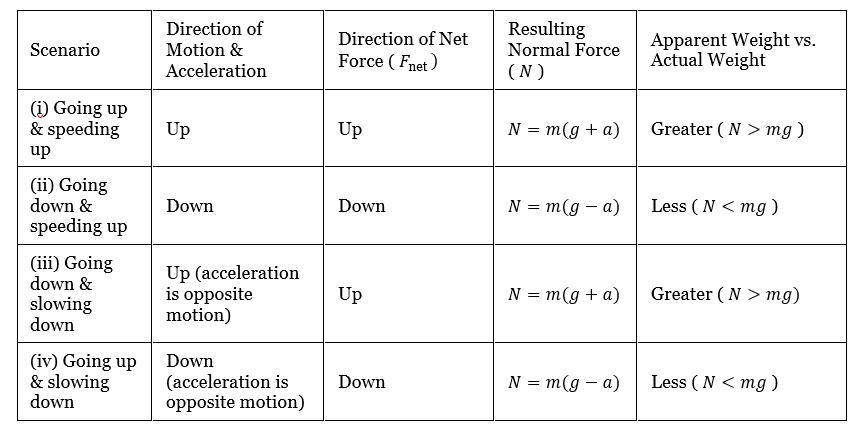
The force exerted by the floor of an elevator on the foot of a person standing there is more than the weight of the person if the elevator is
CorrectIncorrectHint
(b, c) The core principle is Newton’s Second Law in the vertical direction: the net force on the person ( \(F_{\text {net }}=N-m g\), taking up as positive) equals their mass times their acceleration (\(ma\)).
Here is a summary of the scenarios and the resulting apparent weight:
In summary:
Your apparent weight increases ( \(N>m g\) ) whenever the elevator accelerates upward (going up and speeding up, or going down and slowing down).
Your apparent weight decreases ( \(N<m g\) ) whenever the elevator accelerates downward (going down and speeding up, or going up and slowing down). - Question 21 of 61
21. Question
If the tension in the cable supporting an elevator is equal to the weight of the elevator, the elevator may be
CorrectIncorrectHint
(c, d) The tension in the cable will be equal to the weight of the elevator when the acceleration of the elevator is zero.
So when the elevator is going up with uniform speed and going down with uniform speed, the tension in the cable is equal to weight of the elevator.Explanation:
When the tension in the cable is equal to the elevator’s weight, it means there is no net force accelerating the elevator up or down. This condition corresponds to uniform motion, which can be either upward or downward. Since the question doesn’t specify the direction explicitly, both (c) and (d) are correct. - Question 22 of 61
22. Question
A particle is observed from two frames \(S_1\) and \(S_2\). The frame \(S_2\) moves with respect to \(S_1\) with an acceleration \(a\). Let \(F_1\) and \(F_2\) be the pseudo forces on the particle when seen from \(S_1\) and \(S_2\) respectively. Which of the following are not possible?
CorrectIncorrectHint
(d) The analysis of each option is as follows:
Case (a) \(F_1=0, F_2 \neq 0\) : This is possible. \(F_1=0\) means that the frame \(S_1\) is an inertial reference frame. \(F_2 \neq 0\) means that the frame \(S_2\) is a non-inertial reference frame (i.e., it is accelerating with respect to \(S_1\) ).
Case (b) \(F_1 \neq 0, F_2=0\) : This is also possible. The pseudo force in frame \(S_2\) is zero, making \(S_2\) an inertial frame. Since \(F_1 \neq 0\), the frame \(S_1\) is non-inertial and is accelerating with respect to \(S_2\).
Case (c) \(F_1 \neq 0, F_2 \neq 0\) : This is possible if both \(S_1\) and \(S_2\) are non-inertial frames. This means both frames are accelerating relative to a true inertial frame. They could also be accelerating relative to each other.
Case (d) \(\boldsymbol{F}_{\mathbf{1}}=\mathbf{0}, \boldsymbol{F}_{\mathbf{2}}=\mathbf{0}\) : This is not possible unless the two frames \(S_1\) and \(S_2\) are the same frame or are inertial frames with zero relative acceleration. However, a pseudo force is a force that arises only in a non-inertial reference frame. If the particle is seen from two different frames, and both frames are inertial, then the pseudo forces would be zero in both. But if two frames are truly distinct, and a particle is being observed, there is generally a non-zero relative acceleration between them. For the pseudo force to be zero in both frames, they would both have to be inertial, which is a specific, and not universally applicable, scenario. Furthermore, the question implies a comparison between different reference frames. If both frames are inertial, they are not “different” in the sense of having distinct physical observations about forces (they both observe no pseudo forces). Thus, it is not a general possibility. - Question 23 of 61
23. Question
A person says that he measured the acceleration of a particle to be nonzero while no force was acting on the particle.
CorrectIncorrectHint
(d) He might have used a noninertial frame.
Explanation:
Non-inertial frames: A non-inertial frame is a reference frame that is accelerating or rotating. In such a frame, objects can appear to have forces acting on them even when no actual external forces exist. This is because the frame itself is accelerating, creating the illusion of a force.
Newton’s Second Law: In an inertial frame (a frame not accelerating), Newton’s Second Law states that the acceleration of an object is directly proportional to the net force acting on it. If no force is acting, then the acceleration must be zero.
Why other options are incorrect:
(a) He is a liar: This assumes the person is intentionally lying, but it could be a misunderstanding of non-inertial frames.
(b) His clock might have run slow: Time dilation can affect measurements in certain situations, but it doesn’t explain a non-zero acceleration when no force is present.
(c) His meter scale might have been longer than the standard: A faulty meter scale would affect length measurements, not acceleration. - Question 24 of 61
24. Question
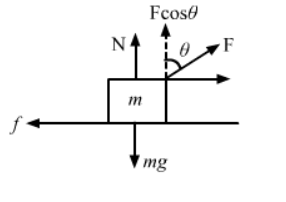
In a situation the contact force by a rough horizontal surface on a body placed on it has constant magnitude. If the angle between this force and the vertical is decreased, the frictional force between the surface and the body will
CorrectIncorrectHint
(b) decrease. The frictional force is the horizontal component of the contact force, which is equal to \(F \sin (\theta)\), where \(F\) is the constant magnitude of the contact force and \(\boldsymbol{\theta}\) is the angle it makes with the vertical. When \(\boldsymbol{\theta}\) decreases, \(\boldsymbol{\operatorname { s i n }} \boldsymbol{(} \boldsymbol{\theta} \boldsymbol{)}\) decreases, causing the frictional force to decrease.

- Question 25 of 61
25. Question
While walking on ice, one should take small steps to avoid slipping. This is because smaller steps ensure
CorrectIncorrectHint
(b) smaller friction is the correct answer because smaller steps reduce the forward and backward forces exerted, which decreases the overall friction and makes it easier to maintain balance on slippery ice. Although some sources incorrectly state that smaller steps lead to a larger normal force, the primary reason for reduced slipping is the reduction in frictional force itself.
smaller friction: Taking smaller steps reduces the force applied in both the forward and backward directions with each step. This decreased force leads to less frictional force, which is the force that opposes motion and causes slipping.
Other options:
(a) larger friction: This is incorrect. Smaller steps decrease the force applied, which reduces the overall friction.
(c) larger normal force: Some sources incorrectly state this is the reason, but the normal force is not significantly changed by the step size, and the primary goal of smaller steps is to reduce the frictional force.
(d) smaller normal force: This is incorrect, as the normal force is not significantly reduced by taking smaller steps. - Question 26 of 61
26. Question
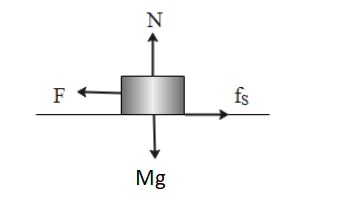
A body of mass \(M\) is kept on a rough horizontal surface (friction coefficient \(=\mu\) ). A person is trying to pull the body by applying a horizontal force but the body is not moving. The force by the surface on \(A\) is \(F\), where
CorrectIncorrectHint
(c) The free body diagram of the mass \(M\) kept on a rough horizontal surface is given as follows.

The normal force acting on the body is given as follows.
\(
N=M a
\)
Where \(M\) is the mass of the body and \(a\) is the acceleration of the body.
The frictional force acting on the body is given as follows.
\(
f_s=\mu N
\)
Where \(\mu\) is the coefficient of friction and N is the normal force acting on the body.
From the free body diagram of the mass M kept on a rough horizontal surface, it’s clear that the horizontal forces acting on the body is the resultant of the force and the frictional force.
\(
\begin{aligned}
& f=\sqrt{(M g)^2+(\mu M g)^2} \\
& f=M g \sqrt{1+\mu^2}
\end{aligned}
\)
This force will be lying between that of the normal force and the frictional force. Thus, this can be expressed in the mathematical form as follows.
\(
M g \leq f \leq M g \sqrt{1+\mu^2}
\)
\(\therefore\) The force by the horizontal surface on the surface of the body is F , where
\(
M g \leq f \leq M g \sqrt{1+\mu^2}
\)
As, the force, \(M g \leq f \leq M g \sqrt{1+\mu^2}\)Explanation: Since the body is not moving, the net force in both the horizontal and vertical directions is zero.
The normal force balances the weight, so \(N=M g\).
The friction force balances the pulling force, so \(f_s=\boldsymbol{P}\).
Step 2: Calculate the force exerted by the surface
The total force exerted by the rough surface on the body is the vector sum of the normal force and the static friction force. Let’s call this force \(F\).
The normal force ( \(\boldsymbol{N}\) ) and the static friction force ( \(\boldsymbol{f}_{\boldsymbol{s}}\) ) are perpendicular to each other. Therefore, the magnitude of the resultant force \(F\) can be found using the Pythagorean theorem:
\(
F=\sqrt{N^2+f_s^2}
\)
Substituting the expressions for \(N\) and \(f_s\), we get:
\(
F=\sqrt{(M g)^2+P^2}
\)
Step 3: Determine the range of the force \(F\)
The body is not moving, which means the applied force \(\boldsymbol{P}\) is less than or equal to the maximum static friction force, \(f_{s, \max }\).
\(
\boldsymbol{P} \leq f_{s, \max }
\)
The maximum static friction force is given by \(f_{s, \max }=\mu N=\mu M g\).
Therefore, the applied force \(\boldsymbol{P}\) can range from zero (when the person is not pulling) up to a maximum of \(\boldsymbol{\mu} \boldsymbol{M g}\).
\(
0 \leq P \leq \mu M g
\)
Now, we can find the range of the force \(F\) by substituting the minimum and maximum values of \(\boldsymbol{P}\) into the equation from Step 2:
Minimum value of \(F\) : When the person is not pulling, \(\boldsymbol{P}=\mathbf{0}\).
\(
F_{\min }=\sqrt{(M g)^2+0^2}=\sqrt{(M g)^2}=M g
\)
Maximum value of \(F\) : When the pulling force is at its maximum, \(\boldsymbol{P}=\boldsymbol{\mu} \boldsymbol{M}\).
\(
F_{\max }=\sqrt{(M g)^2+(\mu M g)^2}=\sqrt{(M g)^2\left(1+\mu^2\right)}=M g \sqrt{1+\mu^2}
\)
Combining these two limits, the range of the force by the surface on the body is:
\(
M g \leq F \leq M g \sqrt{1+\mu^2}
\) - Question 27 of 61
27. Question
A scooter starting from rest moves with a constant acceleration for a time \(\Delta t_1\), then with a constant velocity for the next \(\Delta t_2\) and finally with a constant deceleration for the next \(\Delta t_3\) to come to rest. A 500 N man sitting on the scooter behind the driver manages to stay at rest with respect to the scooter without touching any other part. The force exerted by the seat on the man is
CorrectIncorrectHint
(d) Step 1: Analyze the forces during each phase of motion
The force exerted by the seat on the man is the normal force, which has both a vertical and a horizontal component. The man’s weight is given as 500 N , which is the force of gravity pulling him down.Step 2: Phase \(1\left(\Delta t_1\right)\) – Constant acceleration
In this phase, the scooter and the man accelerate forward. According to Newton’s second law, there must be a net horizontal force to cause this acceleration. The seat provides this horizontal force. The seat must also support the man’s weight, providing a vertical force of 500 N . The total force exerted by the seat is the vector sum of these two forces: one horizontal and one vertical. The magnitude of this resultant force is greater than the vertical force alone. Therefore, the force is greater than 500 N.Step 3: Phase 2 ( \(\Delta t_2\) ) – Constant velocity
During this time, the scooter and the man move at a constant velocity. According to Newton’s first law, there is no net force acting on the man. The only forces acting on him are gravity ( 500 N downwards ) and the force from the seat. To have a net force of zero, the seat must exert an upward force of exactly 500 N to counteract gravity. The horizontal force is zero. Therefore, the force exerted by the seat is exactly 500 N.Step 4: Phase \(3\left(\Delta t_3\right)\) – Constant deceleration
In this phase, the scooter and the man decelerate, coming to rest. Deceleration is acceleration in the opposite direction of motion. Similar to the acceleration phase, there is a net horizontal force required to cause this deceleration, which is provided by the seat. The seat still supports the man’s weight with a vertical force of 500 N . The total force from the seat is the vector sum of the vertical and horizontal forces. The magnitude of this resultant force is greater than the vertical force alone. Therefore, the force is greater than 500 N.
The force exerted by the seat on the man is \(\mathbf{> 5 0 0 ~ N}\) for time \(\boldsymbol{\Delta} \boldsymbol{t}_{\mathbf{1}}\) and \(\boldsymbol{\Delta} \boldsymbol{t}_{\mathbf{3}}\) and \(\mathbf{5 0 0 ~ N}\) for \(\boldsymbol{\Delta} \boldsymbol{t}_{\mathbf{2}}\). - Question 28 of 61
28. Question
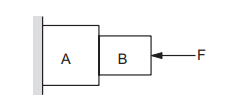
Consider the situation shown in figure below. The wall is smooth but the surfaces of \(A\) and \(B\) in contact are rough. The friction on \(B\) due to \(A\) in equilibrium
 CorrectIncorrect
CorrectIncorrectHint
(d) The system cannot remain in equilibrium because the wall is smooth, meaning there is no horizontal force to counteract the weight of the blocks. For equilibrium, the net force in both the horizontal and vertical directions must be zero. Since the blocks have weight acting downwards and no supporting horizontal force, the net vertical force is not zero, causing them to accelerate downwards.
Weight: The blocks have a combined weight acting vertically downward.
No horizontal support: The wall is smooth, so it exerts no horizontal force (like friction) to prevent the blocks from sliding down.
Net vertical force: Because there is a net downward force (the combined weight) and no upward force to balance it, the blocks will accelerate downwards.
No equilibrium: Therefore, the system cannot be in a state of equilibrium. - Question 29 of 61
29. Question
Suppose all the surfaces in the previous problem are rough. The direction of friction on \(B\) due to \(A\)
CorrectIncorrectHint
(a) upward. If all the surfaces are rough, block B will experience a downward gravitational force. To remain in equilibrium (or to not fall), an upward force must balance this weight, which is provided by the force of friction from block
A.
Gravity pulls B downward: Block B has mass, and gravity pulls it down. This downward force must be counteracted by an upward force to keep it from falling.
Friction provides the upward force: Since all surfaces are rough, the surfaces between A and B are not frictionless. The force of friction exerted by A on B opposes the relative motion or tendency of motion between the blocks. As B has a tendency to move downward relative to A , the friction force exerted by A on B acts in the upward direction. - Question 30 of 61
30. Question
Two cars of unequal masses use similar tyres. If they are moving at the same initial speed, the minimum stopping distance
CorrectIncorrectHint
(c) is same for both cars, because the minimum stopping distance is determined by the initial speed and the coefficient of friction, not the mass of the vehicle.
Here’s a more detailed explanation:
Stopping distance formula: The minimum stopping distance can be calculated using the formula \(s=\frac{v^2}{2 a}\), where \(s\) is the stopping distance, \(v\) is the initial velocity, and \(a\) is the deceleration.
Deceleration: The deceleration is caused by the force of friction, which is calculated as \(F_f=\mu N\), where \(\mu\) is the coefficient of friction and \(N\) is the normal force. For a car, the normal force is equal to its weight, \(N=m g\).
Friction and mass: Therefore, the frictional force is \(F_f=\mu m g\).
Deceleration and mass: According to Newton’s second law ( \(F=m a\) ), the deceleration \(a\) is equal to the frictional force divided by the mass:
\(
a=\frac{F_f}{m}=\frac{\mu m g}{m}=\mu g .
\)
Conclusion: This shows that the deceleration ( \(\mu \mathrm{g}\) ) is independent of the car’s mass. Since the initial speed \((v)\) is the same for both cars and the deceleration \((a)\) is the same for both, the stopping distance ( \(s\) ) must also be the same. - Question 31 of 61
31. Question
In order to stop a car in shortest distance on a horizontal road, one should
CorrectIncorrectHint
(b) Apply the brakes hard enough to just prevent slipping.
Explanation:
Concept: When brakes are applied too hard, the wheels lock up and slide against the road, which reduces the friction and actually increases the stopping distance.
Optimal braking: By applying the brakes just enough to prevent the wheels from slipping, you maintain maximum static friction, which provides the greatest stopping force without causing the wheels to skid.
Why other options are incorrect:
(a) apply the brakes very hard so that the wheels stop rotating: This results in wheel lock and skidding, which decreases friction and increases stopping distance.
(c) pump the brakes (press and release): While this technique can be used to modulate braking pressure in certain situations, especially with Anti-lock Braking Systems (ABS), it is not the most efficient way to stop quickly in a normal braking scenario.
(d) shut the engine off and not apply brakes: This will only slow the car down due to engine drag, but it will not provide the necessary braking force to stop quickly. - Question 32 of 61
32. Question
A block \(A\) kept on an inclined surface just begins to slide if the inclination is \(30^{\circ}\). The block is replaced by another block \(B\) and it is found that it just begins to slide if the inclination is \(40^{\circ}\).
CorrectIncorrectHint
(d) all the three are possible because the condition for a block to start sliding on an inclined plane depends on the coefficient of static friction ( \(\mu\) ), not the mass of the block. The angle of inclination ( \(\boldsymbol{\theta}\) ) at which sliding begins is related to the coefficient of static friction by the formula \(\tan \theta=\mu\). This equation shows that the angle \(\theta\) is independent of the mass of the block.
Coefficient of static friction: For block A, the coefficient of static friction is \(\boldsymbol{\mu}_A=\boldsymbol{\operatorname { t a n }}\left(30^{\circ}\right)\).
For block B, it is \(\boldsymbol{\mu}_B=\boldsymbol{\operatorname { t a n }}\left(40^{\circ}\right)\).
Mass independence: Since the mass ( \(m\) ) cancels out in the equation for the condition of sliding ( \(\mathrm{mg} \sin \theta=\mu \mathrm{mg} \cos \theta\) ), the angle of inclination at which a block starts to slide is determined solely by the coefficient of static friction between the block and the surface.
Conclusion: Therefore, it is possible for block A to have a greater mass than B, a lesser mass, or the same mass, and still satisfy the given conditions. - Question 33 of 61
33. Question
A boy of mass \(M\) is applying a horizontal force to slide a box of mass \(M^{\prime}\) on a rough horizontal surface. The coefficient of friction between the shoes of the boy and the floor is \(\mu\) and that between the box and the floor is \(\mu^{\prime}\). In which of the following cases it is certainly not possible to slide the box ?
CorrectIncorrectHint
(a) Step 1: Analyze the forces
The boy can only push the box if he does not slip. The maximum horizontal force he can apply to the box, \(\boldsymbol{F}_{\boldsymbol{P}}\), is limited by the maximum static friction force between his shoes and the floor. The maximum static friction force on the boy is \(f_{s, \text { boy }}^{\max }=\mu N_{\text {boy }}\), where \(N_{\text {boy }}\) is the normal force on the boy. Since the surface is horizontal, \(N_{\text {boy }}=M g\) . Therefore, the maximum pushing force the boy can exert is \(\boldsymbol{F}_{\boldsymbol{P}, \boldsymbol{\operatorname { m a x }}}=\boldsymbol{\mu} \boldsymbol{M} \boldsymbol{g}\).
The box will slide only if the applied horizontal force, \(\boldsymbol{F}_{\boldsymbol{P}}\) is greater than the maximum static friction force on the box, \(f_{s, \text { box }}^{\max }\). The maximum static friction force on the box is \(f_{s, \text { box }}^{\max }=\mu^{\prime} N_{\text {box }}\), where \(N_{\text {box }}\) is the normal force on the box. Since the surface is horizontal, \(N_{\text {box }}=M^{\prime} g\). Therefore, the force required to slide the box is \(F_{\text {slide }}>\mu^{\prime} M^{\prime} g\).
Step 2: Compare the forces to determine when sliding is not possible
For the box to slide, the maximum force the boy can apply must be greater than the force required to slide the box. This can be expressed as:
\(
\begin{gathered}
F_{P, \max }>F_{\text {slide }} \\
\mu M g>\mu^{\prime} M^{\prime} g \\
\mu M>\mu^{\prime} M^{\prime}
\end{gathered}
\)
This is the condition where sliding is possible. The question asks for the case where it is certainly not possible to slide the box. This occurs when the maximum force the boy can apply is less than or equal to the force required to slide the box. The condition is:
\(
\mu M \leq \mu^{\prime} M^{\prime}
\)
This inequality can be rearranged to compare the ratios of the coefficients of friction and the masses:
\(
\frac{\mu}{\mu^{\prime}} \leq \frac{M^{\prime}}{M}
\)
Step 3: Evaluate the given options
We need to find the option that satisfies the condition \(\mu \boldsymbol{M} \leq \mu^{\prime} \boldsymbol{M}^{\prime}\).
(a) \(\mu<\mu^{\prime}\) and \(M<M^{\prime}\) : In this case, \(\mu / \mu^{\prime}\) is a value less than 1 , and \(M^{\prime} / M\) is a value greater than 1. It is possible for a number less than 1 to be less than or equal to a number greater than 1.
For example, if \(\mu=0.5, \mu^{\prime}=1, M=50 \mathrm{~kg}\), and \(M^{\prime}=100\) kg , then \(\mu M=25\) and \(\mu^{\prime} M^{\prime}=100\). Since \(25<100\), the boy cannot slide the box. This condition makes it certain that the boy cannot slide the box.
(b) \(\mu>\mu^{\prime}\) and \(M<M^{\prime}: \mu / \mu^{\prime}>1\) and \(M^{\prime} / M>1\). Sliding is not certain.
(c) \(\mu<\mu^{\prime}\) and \(M>M^{\prime}: \mu / \mu^{\prime}<1\) and \(M^{\prime} / M<1\). It is not certain whether sliding is possible.
(d) \(\mu>\mu^{\prime}\) and \(M>M^{\prime}: \mu^{\prime} \mu^{\prime}>1\) and \(M^{\prime} / M<1\). In this case, \(\mu M\) is definitely greater than \(\mu^{\prime} M^{\prime}\), so sliding is certainly possible.
It is certainly not possible to slide the box in case (a) \(\boldsymbol{\mu}<\boldsymbol{\mu}^{\prime}, \boldsymbol{M}<\boldsymbol{M}^{\prime}\). - Question 34 of 61
34. Question
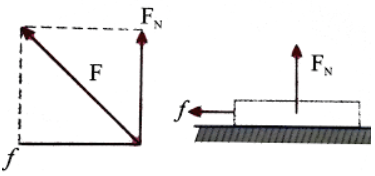
Let \(F, F_N\) and \(f\) denote the magnitudes of the contact force, normal force and the friction exerted by one surface on the other kept in contact. If none of these is zero,
CorrectIncorrectHint
(a, b, d)

Hence \(F=\sqrt{f^2+F_N^2}\) Hence \(F>F_N \& F>f\)
Also \(F=\sqrt{F_N^2+f^2+2 F_N f-2 F_N f}\)
\(
=\sqrt{\left(F_N+f\right)^2-2 F_N f}=\left(F_N+f\right)-\delta
\)
Again \(F=\sqrt{F_N^2+f^2-2 F_N f+2 F_N f}\)
\(
=\sqrt{\left(F_N-f\right)^2+2 F_N f}=\left(F_N-f\right)+\delta>\left(F_N-f\right)
\)
Hence \(F_N-f<f<F_N+f\) - Question 35 of 61
35. Question
The contact force exerted by a body \(A\) on another body \(B\) is equal to the normal force between the bodies. We conclude that
CorrectIncorrectHint
(b, d) According to the question, contact force is equal to the normal force. For the body to remain in equilibrium, the net force acting on the body must be zero. Hence, we can conclude that the force of friction acting between the bodies is zero. Hence Option (B) is correct.
But friction force is equal to zero does not imply that the surface is frictionless. Because the primary function of friction is to decrease relative motion between bodies. So, if the relative motion between the bodies is already zero, then friction will not act on the body. Hence Option (A) is not necessarily true.
Earlier, we concluded that friction is zero. But from the diagram, we can see that Normal Force is not equal to zero. Hence, we can conclude that Normal Force is not equal to Friction. Hence Option (c) is incorrect.
Since, we saw that frictional force between the surfaces is zero but the surfaces are not necessarily frictionless. This clearly implies that there is no relative motion between the surfaces. Hence they do not slip on each other. Hence Option (D) is correct.
- Question 36 of 61
36. Question
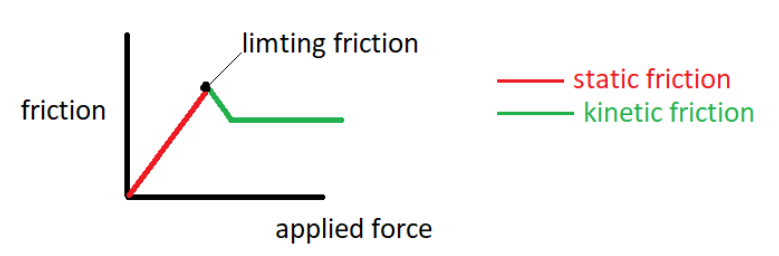
Mark the correct statements about the friction between two bodies.
CorrectIncorrectHint
(b, c, d) When a pull of push force is applied on the block on a surface, it experiences a constant static friction. As and when it is in contact with the surface, the surface opposes the block’s motion over a certain period of time. As and when we start to apply greater force on the body, the body will begin to accelerate with a kinetic friction. Now the friction value decreases, since the body is moving. When the body is said to be static, the amount of friction exerted by the surface on the body will be greater, until the force applied on the body exceeds the holding friction value. Hence static friction is greater than kinetic friction since there are more forces that apply on the body to keep it stationary than the kinetic forces that make it accelerate.
The maximum static friction is called the limiting friction. Limiting friction certainly has a greater value than that of kinetic friction but never lesser than static friction since it is the maxima point of static friction.The graph of the same is given below:

- Question 37 of 61
37. Question
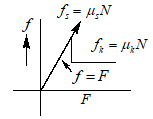
A block is placed on a rough floor and a horizontal force \(F\) is applied on it. The force of friction \(f\) by the floor on the block is measured for different values of \(F\) and a graph is plotted between them.
CorrectIncorrectHint
(b, c) The graph of the force of friction ( \(f\) ) versus the applied horizontal force ( \(F\) ) for a block on a rough floor is a straight line of slope \(45^{\circ}\) for small values of F, and a straight line parallel to the F-axis for larger values of F.
Here is a more detailed explanation:
Static Friction: When a small force \(F\) is applied, the block does not move. The force of static friction, \(f_{s^{\prime}}\) exactly balances the applied force. Therefore, \(f_s=F\). This relationship holds until the applied force reaches the maximum static friction, \(f_{s, \max }=\mu_s N\). On a graph of \(f\) vs. \(F\), this is a straight line with a slope of 1, which corresponds to an angle of \(45^{\circ}\) with the F-axis.
Kinetic Friction: Once the applied force \(F\) exceeds \(f_{s, \max }\), the block begins to move. The force of friction changes to kinetic friction, \(f_k\), which is approximately constant and generally less than \(f_{s, \max }\). The kinetic friction force is given by \(f_k=\mu_k N\). As you continue to increase the applied force, the kinetic friction force remains constant. On the graph, this is represented by a horizontal line parallel to the F-axis.
- Question 38 of 61
38. Question
Consider a vehicle going on a horizontal road towards east. Neglect any force by the air. The frictional forces on the vehicle by the road
CorrectIncorrectHint
(a, b) The correct statements are that the frictional force is towards the east if the vehicle is accelerating and is zero if the vehicle is moving with a uniform velocity. When a vehicle accelerates, the tires push backward on the road, and the road pushes forward on the tires, which is the static friction force that propels the car. If the vehicle moves at a uniform velocity, it is not accelerating, so the net force is zero, and thus the static friction is zero if there are no other opposing forces.
(a) is towards east if the vehicle is accelerating: This is correct. To accelerate forward, the tires must push backward on the road. By Newton’s third law, the road exerts an equal and opposite force (friction) forward on the tires, accelerating the vehicle.
(b) is zero if the vehicle is moving with a uniform velocity: This is also correct. If the velocity is uniform, there is no acceleration. This means the net force on the vehicle is zero, so the frictional force from the road is zero if there are no other opposing forces like air resistance, which is neglected in this problem. - Question 39 of 61
39. Question
When a particle moves in a circle with a uniform speed
CorrectIncorrectHint
(d) When a particle moves in a circle with a uniform speed, its velocity changes (because the direction changes even though the speed remains constant), while the acceleration is constant in magnitude but its direction also changes, so both velocity and acceleration change.
- Question 40 of 61
40. Question
Two cars having masses \(m_1\) and \(m_2\) move in circles of radii \(r_1\) and \(r_2\) respectively. If they complete the circle in equal time, the ratio of their angular speeds \(\omega_1 / \omega_2\) is
CorrectIncorrectHint
(d) Step 1: Define the relationship between angular speed and time period
The angular speed, \(\omega\), is the rate of change of angular displacement. For an object moving in a circle, the angular speed is related to the time it takes to complete one full circle (the period, \(T\) ) by the formula:
\(
\omega=\frac{2 \pi}{T}
\)
Step 2: Use the given condition
The problem states that the two cars complete the circle in equal time. This means their periods are equal:
\(
T_1=T_2
\)
Step 3: Calculate the ratio of the angular speeds
Using the formula from Step 1, we can write the angular speeds for the two cars as:
\(
\begin{aligned}
& \omega_1=\frac{2 \pi}{T_1} \\
& \omega_2=\frac{2 \pi}{T_2}
\end{aligned}
\)
The ratio of their angular speeds is:
\(
\frac{\omega_1}{\omega_2}=\frac{\frac{2 \pi}{T_1}}{\frac{2 \pi}{T_2}}=\frac{T_2}{T_1}
\)
Since \(T_1=T_2\), we can substitute \(T_1\) for \(T_2\) :
\(
\frac{\omega_1}{\omega_2}=\frac{T_1}{T_1}=1
\) - Question 41 of 61
41. Question
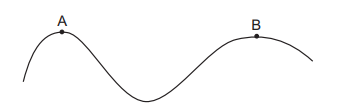
A car moves at a constant speed on a road as shown in figure below. The normal force by the road on the car is \(N_A\) and \(N_B\) when it is at the points \(A\) and \(B\) respectively.
 CorrectIncorrect
CorrectIncorrectHint
(c) Step 1: Analyze forces at point A
At point A , the car is at the top of a hump. The forces acting on the car are the gravitational force, \(m g\), acting downward, and the normal force, \(N_A\), acting upward. The net force provides the centripetal force required for circular motion. Since the car is moving in a circle at the top of a hump, the center of the circle is below the car. Therefore, the net force is directed downward, which is the sum of the gravitational force and the negative normal force:
\(
F_{n e t, A}=m g-N_A
\)
This net force is equal to the centripetal force, \(\frac{m v^2}{R_A}\), where \(R_A\) is the radius of curvature at point A.
\(
m g-N_A=\frac{m v^2}{R_A}
\)
Solving for \(N_A\) :
\(
N_A=m g-\frac{m v^2}{R_A}
\)
The normal force at A is less than the car’s weight.
Step 2: Analyze forces at point B
At point B , the car is at the bottom of a dip. The forces are the gravitational force, \(m g\), acting downward, and the normal force, \(\boldsymbol{N}_{\boldsymbol{B}}\), acting upward. The center of the circular motion is above the car, so the net force is directed upward. The net force is the normal force minus the gravitational force:
\(
F_{n e t, B}=N_B-m g
\)
This net force is equal to the centripetal force, \(\frac{m v^2}{R_B}\), where \(R_B\) is the radius of curvature at point B.
\(
N_B-m g=\frac{m v^2}{R_B}
\)
Solving for \(\boldsymbol{N}_{\boldsymbol{B}}\) :
\(
N_B=m g+\frac{m v^2}{R_B}
\)
The normal force at B is greater than the car’s weight.
Step 3: Compare \(\boldsymbol{N}_{\boldsymbol{A}}\) and \(\boldsymbol{N}_{\boldsymbol{B}}\)
By comparing the expressions for \(N_A\) and \(N_B\) :
\(
\begin{aligned}
& N_A=m g-\frac{m v^2}{R_A} \\
& N_B=m g+\frac{m v^2}{R_B}
\end{aligned}
\)
Since \(\frac{m v^2}{R_A}\) and \(\frac{m v^2}{R_B}\) are both positive quantities, it is clear that \(N_A\) is less than \(m g\) and \(N_B\) is greater than \(m g\).
Therefore, \(N_A<N_B\). - Question 42 of 61
42. Question
A particle of mass \(m\) is observed from an inertial frame of reference and is found to move in a circle of radius \(r\) with a uniform speed \(v\). The centrifugal force on it is
CorrectIncorrectHint
(d) In an inertial frame of reference, there is no centrifugal force. The force acting on the particle is the centripetal force, which is a real force directed towards the center of the circle. This force is responsible for the particle’s circular motion. The magnitude of the centripetal force is given by the equation:
\(
F_c=\frac{m v^2}{r}
\)
Centrifugal force is a fictitious force that only appears in a non-inertial (rotating) frame of reference.Explanation: In an inertial (non-accelerating) frame of reference, centrifugal force is not included because it is a “fictitious” or “pseudo” force that only appears when observing motion from a rotating, non-inertial frame. From an inertial frame, the object’s circular motion is explained solely by the real, inward-directed centripetal force. The feeling of an outward “centrifugal force” arises from the object’s inertia when viewed from within the rotating frame, where you need to invent this fictitious force to make Newton’s laws appear to hold.
Inertial frame vs. non-inertial frame
Inertial frame: An observer in this frame is not accelerating. The only forces acting on an object moving in a circle are the real forces pulling it towards the center, like gravity or tension.
Non-inertial frame: An observer in this frame is rotating or accelerating. From this perspective, it feels like an outward force is pushing you away from the center.
The “trick”: To make Newton’s laws seem valid in a rotating frame, you add “fictitious” forces like centrifugal force. It’s a way to account for the fact that you are no longer in an inertial frame.Analogy: A ball on a string
In an inertial frame: You see the string pulling the ball inward (centripetal force), causing it to continuously change direction and move in a circle.
In a non-inertial frame: If you were holding the string and spinning the ball, you would feel a pull on your hand, and it would feel like you need to apply an outward force to keep the ball from flying away (this is the centrifugal force). - Question 43 of 61
43. Question
A particle of mass \(m\) rotates about the \(Z\)-axis in a circle of radius \(a\) with a uniform angular speed \(\omega\). It is viewed from a frame rotating about the \(Z\)-axis with a uniform angular speed \(\omega_0\). The centrifugal force on the particle is
CorrectIncorrectHint
(b) The centrifugal force on a particle observed from a rotating frame of reference is a fictitious force that depends on the mass of the particle, its distance from the axis of rotation, and the angular speed of the rotating frame itself.
Step 1: Identify the relevant variables
The problem provides the following information:
Mass of the particle: \(m\)
Radius of the circular path: \(\boldsymbol{a}\)
Angular speed of the particle in the inertial frame: \(\boldsymbol{\omega}\)
Angular speed of the rotating frame: \(\omega_0\)
Step 2: Apply the formula for centrifugal force
The formula for the centrifugal force, \(F_c\), is given by:
\(
F_c=m \omega^2 r
\)
where \(m\) is the mass, \(\omega\) is the angular speed of the rotating frame of reference, and \(r\) is the radial distance from the axis of rotation.
Step 3: Substitute the variables from the problem
In this problem, the angular speed of the rotating frame is \(\omega_0\) and the radial distance is \(a\). The angular speed of the particle, \(\omega\), is irrelevant for calculating the centrifugal force, as this force is a property of the non-inertial frame of the observer, not the motion of the particle within that frame.
Substituting these values into the formula, we get:
\(
F_c=m \omega_0^2 a
\) - Question 44 of 61
44. Question
A particle is kept fixed on a turntable rotating uniformly. As seen from the ground the particle goes in a circle, its speed is \(20 \mathrm{~cm} / \mathrm{s}\) and acceleration is \(20 \mathrm{~cm} / \mathrm{s}^2\). The particle is now shifted to a new position to make the radius half of the original value. The new values of the speed and acceleration will be
CorrectIncorrectHint
(a) Step 1: Determine the angular velocity and initial radius
The relationship between speed ( \(\boldsymbol{v}\) ), angular velocity ( \(\boldsymbol{\omega}\) ), and radius ( \(\boldsymbol{r}\) ) for uniform circular motion is \(v=\omega r\). The centripetal acceleration ( \(a\) ) is given by \(a=\omega^2 r=v^2 / r\)
From the initial conditions, the speed is \(v_1=20 \mathrm{~cm} / \mathrm{s}\) and the acceleration is \(a_1=20 \mathrm{~cm} / \mathrm{s}^2\). We can find the initial radius \(\left(r_1\right)\) using the acceleration formula:
\(
r_1=\frac{v_1^2}{a_1}=\frac{(20 \mathrm{~cm} / \mathrm{s})^2}{20 \mathrm{~cm} / \mathrm{s}^2}=\frac{400 \mathrm{~cm}^2 / \mathrm{s}^2}{20 \mathrm{~cm} / \mathrm{s}^2}=20 \mathrm{~cm}
\)
Now, we can find the constant angular velocity ( \(\omega\) ) of the turntable:
\(
\omega=\frac{v_1}{r_1}=\frac{20 \mathrm{~cm} / \mathrm{s}}{20 \mathrm{~cm}}=1 \mathrm{rad} / \mathrm{s}
\)
Step 2: Calculate the new speed and acceleration
The particle is shifted to a new position where the radius is half the original value. The angular velocity ( \(\omega\) ) of the turntable remains constant.
The new radius is \(r_2=\frac{1}{2} r_1=\frac{1}{2}(20 \mathrm{~cm})=10 \mathrm{~cm}\).
The new speed ( \(v_2\) ) is:
\(
v_2=\omega r_2=(1 \mathrm{rad} / \mathrm{s})(10 \mathrm{~cm})=10 \mathrm{~cm} / \mathrm{s}
\)
The new acceleration ( \(a_2\) ) is:
\(
a_2=\omega^2 r_2=(1 \mathrm{rad} / \mathrm{s})^2(10 \mathrm{~cm})=10 \mathrm{~cm} / \mathrm{s}^2
\) - Question 45 of 61
45. Question
Water in a bucket is whirled in a vertical circle with a string attached to it. The water does not fall down even when the bucket is inverted at the top of its path. We conclude that in this position
CorrectIncorrectHint
(c) At the top of the path, the direction of \(m g\) is vertically downward and for centrifugal force \(\left(\frac{m v^2}{r}\right)\), the direction is vertically upward. If the vertically downward force is not greater, water will not fall.
- Question 46 of 61
46. Question
A stone of mass \(m\) tied to a string of length \(l\) is rotated in a circle with the other end of the string as the centre. The speed of the stone is \(v\). If the string breaks, the stone will move
CorrectIncorrectHint
(c) If the string breaks, the stone will move along a tangent to the circle at the point where the break occurred. This is because, according to Newton’s first law, the stone will continue in a straight line in the direction of its instantaneous velocity, which is tangential to the circular path at that moment.
Instantaneous velocity: At any given point, a moving object’s velocity is the direction it is traveling at that exact instant. For an object in circular motion, this velocity is always tangent to the circle.
Centripetal force: The string provides the centripetal force that constantly pulls the stone toward the center, forcing it to move in a circle.
After the break: When the string breaks, this inward force disappears. With no force to change its direction, the stone continues in a straight line due to inertia. - Question 47 of 61
47. Question
A coin placed on a rotating turntable just slips if it is placed at a distance of 4 cm from the centre. If the angular velocity of the turntable is doubled, it will just slip at a distance of
CorrectIncorrectHint
(a) Step 1: Understand the forces at play
For the coin on the rotating turntable, the centripetal force required to keep it moving in a circle is provided by the force of static friction. The coin will just begin to slip when the required centripetal force exceeds the maximum possible force of static friction.
The centripetal force is given by \(F_c=m \omega^2 r\), where \(m\) is the mass, \(\omega\) is the angular velocity, and \(\boldsymbol{r}\) is the distance from the center. The maximum static friction force is \(F_s=\mu_s m g\), where \(\mu_s\) is the coefficient of static friction and \(g\) is the acceleration due to gravity.
Step 2: Set up the equation for the initial condition
At the point where the coin just slips, the centripetal force equals the maximum static friction force:
\(
\begin{gathered}
F_c=F_s \\
m \omega_1^2 r_1=\mu_s m g
\end{gathered}
\)
The mass ( \(m\) ) cancels out, leaving:
\(
\omega_1^2 r_1=\mu_s g
\)
Since \(\mu_s\) and \(g\) are constants, the product of the squared angular velocity and the radius is a constant:
\(
\omega_1^2 r_1=\text { constant }
\)
Step 3: Apply the new conditions and solve for the new distance
The problem states that the angular velocity is doubled, so \(\omega_2=2 \omega_1\). We want to find the new distance, \(\boldsymbol{r}_2\), where the coin will just slip. Using the constant relationship from Step 2:
\(
\omega_2^2 r_2=\omega_1^2 r_1
\)
Substitute the new angular velocity, \(\omega_2\) :
\(
\begin{aligned}
\left(2 \omega_1\right)^2 r_2 & =\omega_1^2 r_1 \\
4 \omega_1^2 r_2 & =\omega_1^2 r_1
\end{aligned}
\)
Divide both sides by \(\omega_1^2\) :
\(
4 r_2=r_1
\)
We are given that \(r_1=4 \mathrm{~cm}\).
\(
\begin{aligned}
4 r_2 & =4 \mathrm{~cm} \\
r_2 & =\frac{4}{4} \mathrm{~cm} \\
r_2 & =1 \mathrm{~cm}
\end{aligned}
\) - Question 48 of 61
48. Question
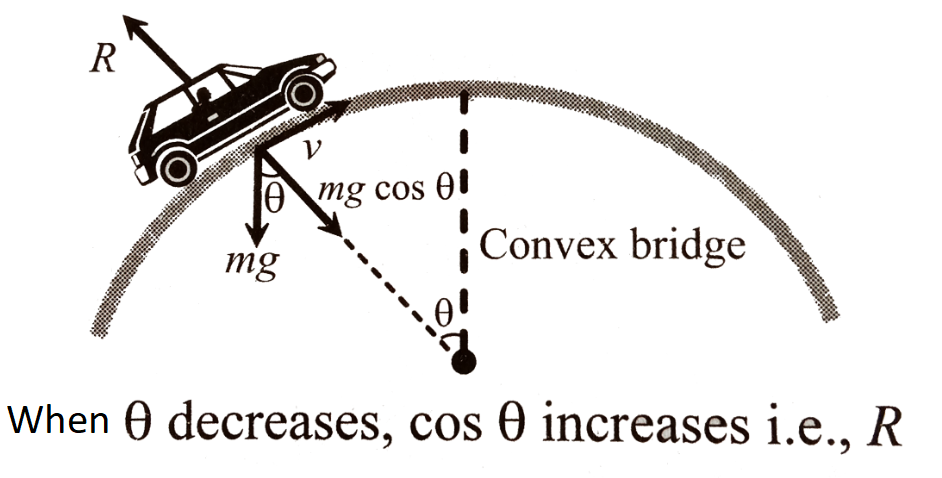
A motorcyle is going on an overbridge of radius \(R\). The driver maintains a constant speed. As the motorcycle is ascending on the overbridge, the normal force on it
CorrectIncorrectHint
(a) As the motorcycle ascends the overbridge, the normal force on it increases.
Explanation: When the motorcycle ascends, the angle between the vertical and the direction of the motorcycle’s motion decreases, which means the component of its weight acting towards the center of the bridge (centripetal force) increases. This increase in the component of weight necessitates a larger normal force to counterbalance it and keep the motorcycle on the bridge’s path.The normal force on the motorcycle, \(\mathrm{R}=\mathrm{mg} \cos \theta-\frac{\mathrm{mv}^2}{R}\)
As the motorcycle is ascending on the overbridge, \(\theta\) decreases (from \(\frac{\pi}{2}\) to 0 ).
So, normal force increases with decrease in \(\theta\).
- Question 49 of 61
49. Question
Three identical cars \(A, B\) and \(C\) are moving at the same speed on three bridges. The car \(A\) goes on a plane bridge, \(B\) on a bridge convex upward and \(C\) goes on a bridge concave upward. Let \(F_{\mathrm{A}}, F_{\mathrm{B}}\) and \(F_{\mathrm{C}}\) be the normal forces exerted by the cars on the bridges when they are at the middle of bridges.
CorrectIncorrectHint
(c) \(F_{\mathrm{C}}\) is maximum of the three forces.
Explanation
To determine the normal force on each car, we can analyze the forces acting on them at the middle of the bridges using Newton’s second law, \(\sum \boldsymbol{F}=\boldsymbol{m} \boldsymbol{a}\). In each case, the forces acting on the car are the gravitational force ( \(m g\) ) acting downward and the normal force ( \(\boldsymbol{F}_{\boldsymbol{N}}\) ) from the bridge acting upward.
Car A (plane bridge): The car moves at a constant speed along a flat path. There is no vertical acceleration, so the net vertical force is zero. The normal force ( \(F_A\) ) is equal to the gravitational force.
\(
F_A-m g=0 \Longrightarrow F_{\mathrm{A}}=m g
\)
Car B (convex bridge): The car is at the top of a circular path, so it experiences a centripetal acceleration ( \(a_c=v^2 / r\) ) directed downward. The net force must also be downward.
\(
m g-F_B=m a_c \Longrightarrow F_{\mathrm{B}}=m g-m a_c
\)
Since \(m a_c>0\), the normal force exerted by the car on the convex bridge is less than its weight.
Car C (concave bridge): The car is at the bottom of a circular path, so it experiences a centripetal acceleration ( \(a_c=v^2 / r\) ) directed upward. The net force must also be upward.
\(
F_C-m g=m a_c \Longrightarrow F_C=m g+m a_c
\)
Since \(m a_c>0\), the normal force exerted by the car on the concave bridge is greater than its weight.
Comparing the three forces, we find that \(F_{\mathrm{C}}>F_{\mathrm{A}}>F_{\mathrm{B}}\). Therefore, \(F_{\mathrm{C}}\) is the maximum of the three forces. - Question 50 of 61
50. Question
A train \(A\) runs from east to west and another train \(B\) of the same mass runs from west to east at the same speed along the equator. \(A\) presses the track with a force \(F_1\) and \(B\) presses the track with a force \(F_2\).
CorrectIncorrectHint
(a) Step 1: Analyze the forces acting on the trains
The force with which a train presses on the track is the normal force, which is its apparent weight. The apparent weight of an object on the equator is the gravitational force minus the centripetal force required to keep it moving with the Earth’s rotation.
The force of gravity acting on each train is \(F_g=m g\), where \(m\) is the mass of the train and \(g\) is the acceleration due to gravity. This force acts downwards, towards the center of the Earth.
The centripetal force required for an object to move in a circle is given by \(F_c=m a_c=m \frac{v_{\text {net }}^2}{R}\), where \(v_{\text {net }}\) is the net speed of the object relative to the center of the Earth and \(R\) is the radius of the Earth. This force must be directed towards the center of the Earth.
Step 2: Calculate the net speed and normal force for each train
Let the speed of the trains relative to the ground be \(v\) and the speed of a point on the equator due to the Earth’s rotation be \(v_{\text {rot }}\).
For train A, which runs from east to west, its motion is opposite to the Earth’s rotation. Its net speed relative to the center of the Earth is \(v_{\text {net }, A}=v_{\text {rot }}-v\). The normal force \(F_1\) is the force of gravity minus the centripetal force:
\(
F_1=m g-m \frac{v_{\text {net }, A}^2}{R}=m g-m \frac{\left(v_{\text {rot }}-v\right)^2}{R}
\)
For train B, which runs from west to east, its motion is in the same direction as the Earth’s rotation. Its net speed relative to the center of the Earth is \(v_{\text {net }, B}=v_{\text {rot }}+v\). The normal force \(F_2\) is the force of gravity minus the centripetal force:
\(
F_2=m g-m \frac{v_{n e t, B}^2}{R}=m g-m \frac{\left(v_{r o t}+v\right)^2}{R}
\)
Step 3: Compare the normal forces \(F_1\) and \(F_2\)
To compare \(F_1\) and \(F_2\), we can compare the terms being subtracted from \(m g\).
The term for train A is \(\frac{\left(v_{r o t}-v\right)^2}{R}\).
The term for train B is \(\frac{\left(v_{r o t}+v\right)^2}{R}\).
Since \(v_{\text {rot }}\) and \(v\) are both positive speeds, we know that \(\left(v_{\text {rot }}+v\right)>\left(v_{\text {rot }}-v\right)\).
Squaring both sides, we get \(\left(v_{\text {rot }}+v\right)^2>\left(v_{\text {rot }}-v\right)^2\).
Therefore, \(\frac{\left(v_{\text {rot }}+v\right)^2}{R}>\frac{\left(v_{\text {rot }}-v\right)^2}{R}\).
This means that a larger value is being subtracted from \(m g\) to find \(F_2\) compared to \(F_1\).
Consequently, \(F_1\) must be greater than \(F_2\).
\(
F_1>F_2
\) - Question 51 of 61
51. Question
If the earth stops rotating, the apparent value of \(g\) on its surface will
CorrectIncorrectHint
(d) increase at some places and remain the same at some other places.
Explanation:
When the Earth rotates, the centrifugal force due to its rotation acts outward, effectively reducing the apparent value of gravity at the equator. However, at the poles, where there is no centrifugal force to counteract gravity, the apparent value of \(g\) remains the same. Therefore, if the Earth stopped rotating, the apparent value of \(g\) would increase at the equator but remain unchanged at the poles.Why other options are incorrect:
(a) increase everywhere: This is incorrect because while the apparent value of \(g\) would increase at most locations due to the absence of centrifugal force, it would remain the same at the poles.
(b) decrease everywhere: This is incorrect because the centrifugal force is an outward force that counteracts gravity, so its absence would lead to an increase in apparent gravity at most locations.
(c) remain the same everywhere: This is incorrect because the Earth’s rotation does affect the apparent value of \(g\), causing it to be smaller at the equator than at the poles. - Question 52 of 61
52. Question
A rod of length \(L\) is pivoted at one end and is rotated with a uniform angular velocity in a horizontal plane. Let \(T_1\) and \(T_2\) be the tensions at the points \(L / 4\) and \(3 L / 4\) away from the pivoted ends.
CorrectIncorrectHint
(a) Step 1: Define the tension in the rod
The tension at any point in the rotating rod is due to the centripetal force required to keep all the mass beyond that point rotating. Let the rod have a uniform linear mass density \(\lambda=M / L\), where \(M\) is the total mass and \(L\) is the length of the rod.
Consider a small element of the rod of length \(d r\) at a distance \(r\) from the pivot. The mass of this element is \(d m=\lambda d r\). The centripetal force on this element is \(d F_c=d m r \omega^2=\lambda \omega^2 r d r\).
The tension \(\boldsymbol{T} \boldsymbol{(} \boldsymbol{x} \boldsymbol{)}\) at a distance \(\boldsymbol{x}\) from the pivot is the total centripetal force for the part of the rod from \(x\) to \(L\). This can be found by integrating the centripetal force elements from \(x\) to \(L . \quad\)
Step 2: Calculate the tensions \(\mathbf{T}_{\mathbf{1}}\) and \(\mathbf{T}_{\mathbf{2}}\)
The general expression for the tension at a distance \(\boldsymbol{x}\) from the pivot is:
\(
\begin{gathered}
T(x)=\int_x^L \lambda \omega^2 r d r=\lambda \omega^2 \int_x^L r d r \\
T(x)=\lambda \omega^2\left[\frac{r^2}{2}\right]_x^L=\lambda \omega^2\left(\frac{L^2-x^2}{2}\right)
\end{gathered}
\)
For \(T_1\), the point is at \(x_1=L / 4\) :
\(
T_1=\lambda \omega^2\left(\frac{L^2-(L / 4)^2}{2}\right)=\lambda \omega^2\left(\frac{L^2-L^2 / 16}{2}\right)=\lambda \omega^2\left(\frac{15 L^2 / 16}{2}\right)=\frac{15}{32} \lambda \omega^2 L^2
\)
For \(T_2\), the point is at \(x_2=3 L / 4\) :
\(
T_2=\lambda \omega^2\left(\frac{L^2-(3 L / 4)^2}{2}\right)=\lambda \omega^2\left(\frac{L^2-9 L^2 / 16}{2}\right)=\lambda \omega^2\left(\frac{7 L^2 / 16}{2}\right)=\frac{7}{32} \lambda \omega^2 L^2
\)
Step 3: Compare \(\boldsymbol{T}_{\mathbf{1}}\) and \(\boldsymbol{T}_{\mathbf{2}}\)
Comparing the two expressions for tension:
\(
T_1=\frac{15}{32} \lambda \omega^2 L^2 \quad \text { and } \quad T_2=\frac{7}{32} \lambda \omega^2 L^2
\)
Since \(\lambda, \omega\), and \(L\) are all positive constants, we can see that \(15 / 32>7 / 32\). Therefore, \(T_1>T_2\). - Question 53 of 61
53. Question
A simple pendulum having a bob of mass \(m\) is suspended from the ceiling of a car used in a stunt film shooting. The car moves up along an inclined cliff at a speed \(v\) and makes a jump to leave the cliff and lands at some distance. Let \(R\) be the maximum height of the car from the top of the cliff. The tension in the string when the car is in air is
CorrectIncorrectHint
(d) When the car is in the air after leaving the cliff, both the car and the pendulum bob are in a state of freefall. In a freefall reference frame, the effective acceleration due to gravity is zero.
The forces acting on the pendulum bob are:
The downward force of gravity, \(mg\).
The upward tension force from the string, \(T\).
According to Newton’s Second Law, the net force on the bob is equal to its mass times its acceleration:
\(
F_{n e t}=m a
\)
Since the bob is in freefall, its acceleration is equal to the acceleration due to gravity, \(g\) , directed downwards. The net force is the gravitational force minus the tension:
\(
m g-T=m a
\)
Substituting \(\boldsymbol{a}=\boldsymbol{g}\) for an object in freefall:
\(
m g-T=m g
\)
Solving for the tension, \(T\) :
\(
\begin{gathered}
T=m g-m g \\
T=0
\end{gathered}
\)
Therefore, the tension in the string is zero. - Question 54 of 61
54. Question
Let \(\theta\) denote the angular displacement of a simple pendulum oscillating in a vertical plane. If the mass of the bob is \(m\), the tension in the string is \(m g \cos \theta\)
CorrectIncorrectHint
(c) at the extreme positions because the tension in the string of a simple pendulum is equal to \(m g \cos \theta\) only when the bob’s instantaneous velocity is zero, which occurs at the extreme positions. At other positions, the tension must also provide the necessary centripetal force for the circular motion, so the formula is
\(
T=m g \cos \theta+\frac{m v^2}{r} .
\)
At the extreme positions: The bob momentarily stops at the highest points of its swing. At this point, its velocity ( \(v\) ) is zero, so the centripetal force term ( \(\frac{m v^2}{r}\) ) becomes zero. This leaves the tension ( \(\boldsymbol{T}\) ) equal to the component of gravity along the string, which is \(m g \cos \theta\).
At the mean position: The bob has its maximum velocity at the lowest point (mean position). The tension in the string has to balance both the gravitational component \(\left(m g \cos \theta\right.\), where \(\theta=0\) ) and the centripetal force, so \(T=m g+\frac{m v^2}{r}\).
The general formula: For any position other than the extreme, the tension in the string is given by the formula \(T=m g \cos \theta+\frac{m v^2}{r}\), where \(v\) is the instantaneous velocity of the bob and \(\boldsymbol{r}\) is the length of the pendulum. - Question 55 of 61
55. Question
An object follows a curved path. The following quantities may remain constant during the motion
CorrectIncorrectHint
(a, d)
The quantities that may remain constant during the motion of an object following a curved path are (a) speed and (d) magnitude of acceleration.
Explanation:
Speed: Speed is a scalar quantity that only measures the magnitude of velocity (how fast an object is moving), and it can be constant even if the object is changing direction.
Magnitude of acceleration: Similarly, the magnitude of acceleration (how much the object’s speed is changing) can be constant if the object is moving with a constant speed around a curved path (like in circular motion).Why the other options are incorrect:
Velocity: Velocity is a vector quantity that has both magnitude (speed) and direction. Since the direction of an object moving on a curved path is constantly changing, its velocity can never be constant.
Acceleration: Acceleration is also a vector quantity. Even if the magnitude of acceleration remains constant, the direction of acceleration changes continuously to match the changing direction of the object’s velocity. - Question 56 of 61
56. Question
Assume that the earth goes round the sun in a circular orbit with a constant speed of \(30 \mathrm{~km} / \mathrm{s}\).
CorrectIncorrectHint
(d)
(a) The average velocity of the earth from January 1st to June 30th is not zero. During this period (approximately half a year), the Earth travels approximately half of its circular orbit around the Sun. The starting and ending points are diametrically opposite, so the displacement is the diameter of the orbit, and thus the average velocity (displacement/time) is non-zero and significant.
(b) The average acceleration is defined as the change in velocity divided by the time interval ( \(\boldsymbol{\Delta} \boldsymbol{v} \boldsymbol{/} \boldsymbol{\Delta} \boldsymbol{t}\) ). Since the Earth completes half an orbit, its velocity vector at the end of the period (pointing opposite to the start) is the negative of the initial velocity vector. Thus, the change in velocity, \(\Delta v\), is \(2 v\) (where \(v=30 \mathrm{~km} / \mathrm{s}\) ). The time period is half a year (approx. \(1.577 \times 10^7\) seconds). The average acceleration is \((2 \times 30 \mathrm{~km} / \mathrm{s}) /\left(1.577 \times 10^7 \mathrm{~s}\right)\), which is a very small number, not \(60 \mathrm{~km} / \mathrm{s}^2\).
(c) The average speed is the total distance traveled divided by the time taken. The Earth travels a vast distance (the entire circumference of its orbit) over one full year (January 1st to December 31st). The total distance is non-zero, and the time is nonzero, so the average speed is non-zero (it is \(30 \mathrm{~km} / \mathrm{s}\) ). The average velocity over a full year, however, would be zero, as the Earth returns to its starting position, resulting in zero net displacement.
(d) The instantaneous acceleration of the earth points towards the sun. In uniform circular motion, the acceleration vector (centripetal acceleration) is always directed towards the center of the circle to continuously change the direction of the velocity vector and keep the object in orbit. This is the force of gravity acting between the Earth and the Sun.Therefore, the only correct statement is (d).
- Question 57 of 61
57. Question
The position vector of a particle in a circular motion about the origin sweeps out equal area in equal time. Its
CorrectIncorrectHint
(b, d) speed remains constant, tangential acceleration remains constant (which is 0).
Explanation:
When a particle moves in circular motion and sweeps out equal areas in equal time, it indicates uniform circular motion. In uniform circular motion, the speed (magnitude of velocity) remains constant, even though the direction of the velocity changes continuously.Why other options are incorrect:
(a) velocity remains constant: Velocity is a vector quantity that includes both magnitude (speed) and direction. In circular motion, the direction of velocity is constantly changing, even if the speed remains constant. Therefore, velocity is not constant.
(c) acceleration remains constant: Acceleration is the rate of change of velocity. In uniform circular motion, the magnitude of acceleration (centripetal acceleration) is constant, but its direction is constantly changing. Therefore, acceleration is not constant.
(d) tangential acceleration remains constant: Tangential acceleration is the component of acceleration that is tangent to the circle’s path. In uniform circular motion, there is no tangential acceleration because the particle’s speed is constant and the acceleration is entirely directed towards the center of the circle (centripetal acceleration). Therefore, tangential acceleration is zero(it’s constant). - Question 58 of 61
58. Question
A particle is going in a spiral path as shown in figure below with constant speed.
 CorrectIncorrect
CorrectIncorrectHint
(c) The magnitude of acceleration is constant.
Explanation:
Constant speed, changing direction: Even though the particle is moving with a constant speed, its velocity is constantly changing because the direction is changing as it spirals.
Centripetal acceleration: The acceleration in circular motion is called centripetal acceleration, and it is always directed towards the center of the circle. In a spiral path, this centripetal acceleration is constantly changing in direction to keep the particle on the spiral path.
Constant magnitude: However, the magnitude of this centripetal acceleration remains constant as long as the speed remains constant.Why other options are incorrect:
(a) The velocity of the particle is constant: As explained above, the velocity is not constant because the direction is changing.
(b) The acceleration of the particle is constant: The acceleration is not constant because its direction is constantly changing, even though its magnitude is constant.
(d) The magnitude of acceleration is decreasing continuously: The magnitude of the acceleration is not decreasing; it remains constant due to the constant speed. - Question 59 of 61
59. Question
A car of mass \(M\) is moving on a horizontal circular path of radius \(r\). At an instant its speed is \(v\) and is increasing at a rate \(a\).
CorrectIncorrectHint
(b, c)
\(
\begin{aligned}
& F_t=m a \text { and } F_c=\frac{m v^2}{r} \\
& \therefore F=\text { Frictional force }=\sqrt{F_c^2+F_t^2}>\frac{m v^2}{r} \\
& \text { Also } \mu=\tan \theta=\frac{F_t}{m g}=\frac{a}{g}
\end{aligned}
\) - Question 60 of 61
60. Question
A circular road of radius \(r\) is banked for a speed \(v=40 \mathrm{km} / \mathrm{hr}\). A car of mass \(m\) attempts to go on the circular road. The friction coefficient between the tyre and the road is negligible.
CorrectIncorrectHint
(b, d) Let
banking angle \(=\theta\)
design speed \(=\mathrm{v}\) (here \(40 \mathrm{~km} / \mathrm{h}\) )
radius \(=r\)
mass of car = \(m\)
For a frictionless banked curve, the condition for no slipping is:
\(
\tan \theta=\frac{v^2}{r g}
\)
At this speed only, the horizontal component of the normal force provides the required centripetal force.
Check each statement
(a) The car cannot make a turn without skidding.
False.
It can make the turn without skidding only at the design speed \(v=40 \mathrm{~km} / \mathrm{h}\). No friction is needed at that specific speed.
(b) If the car turns at a speed less than \(40 \mathrm{~km} / \mathrm{h}\), it will slip down.
True.
At a lower speed the required centripetal force \(m v^2 / r\) is less than the horizontal component of the normal force needed for balance, so the car tends to slide down the bank because friction is negligible and cannot provide the inward/outward balancing force.
(c) At the correct speed, the force by the road on the car is equal to \(m v^2 / r\).
False.
At the correct speed the road exerts only a normal force N , inclined at angle \(\theta\).
The horizontal component of that force supplies the centripetal force:
\(
N \sin \theta=\frac{m v^2}{r} .
\)
But the magnitude of the full force is:
\(
N=\frac{m g}{\cos \theta}
\)
This is not equal to \(m v^2 / r\). It is larger.
(d) At the correct speed, the force by the road on the car is greater than \(m g\) as well as greater than \(m v^2 / r\).
True.
Because \(N=\frac{m g}{\cos \theta}>m g(\) since \(\cos \theta<1)\), and also \(N>N \sin \theta=m v^2 / r\). - Question 61 of 61
61. Question
A person applies a constant force \(\vec{F}\) on a particle of mass \(m\) and finds that the particle moves in a circle of radius \(r\) with a uniform speed \(v\) as seen from an inertial frame of reference.
CorrectIncorrectHint
(b, d) A constant force cannot by itself make a particle move in a circle with constant speed, because circular motion requires the net force to continually change direction toward the centre. So let’s analyze the statements.
Key point
Uniform circular motion requires a centripetal force
\(
F_c=\frac{m v^2}{r}
\)
directed radially inward at all times, changing direction as the particle moves.
If the applied force \(\vec{F}\) is constant (fixed in magnitude and direction), then the net force cannot be purely radial at every instant \(\rightarrow\) circular motion is impossible unless additional forces act.
Now check each option
(a) This is not possible.
False.
It is possible if there are other forces acting on the particle (e.g., tension, normal reaction, magnetic force, etc.).
The statement says it is impossible under any circumstances, which is too strong.
(b) There are other forces on the particle.
True.
A constant force alone cannot produce uniform circular motion, so additional forces must be present to change the direction of the net force continuously.
(c) The resultant of the other forces is \(\frac{m v^2}{r}\) towards the centre.
False.
The centripetal force needed is
\(
F_c=\frac{m v^2}{r} .
\)
But the net force must equal this. Since the applied constant force \(\vec{F}\) is one of the forces, the resultant of the other forces must be:
\(
\vec{F}_{\text {other }}=\vec{F}_c-\vec{F} .
\)
This resultant is not simply \(m v^2 / r\) inward.
Its magnitude and direction depend on how \(\vec{F}\) combines with the needed centripetal force, and therefore it cannot be fixed at \(m v^2 / r\) inward.
(d) The resultant of the other forces varies in magnitude as well as direction.
True.
Since the applied force \(\vec{F}\) is constant but the required centripetal force keeps rotating, the remaining forces must continually change both magnitude and direction so that:
\(
\vec{F}+\vec{F}_{\text {ot }^t \downarrow}=\vec{F}_c(t)
\)
with \(\vec{F}_c(t)\) rotating around the circle.