6.12 Dynamics of rotational motion about a fixed axis
Dynamics of rotational motion about a fixed axis describes how rigid bodies spin, focusing on torque \((\tau)\), moment of inertia \((I)\), and angular acceleration \((\alpha)\), analogous to force, mass, and linear acceleration in straight-line motion, governed by the key equation \({\tau} = {I} {\alpha}\) (Newton’s Second Law for Rotation).
We know that in rotational motion moment of inertia and torque play the same role as mass and force respectively in linear motion. For example, we know that in linear motion, work done is given by \(F d x\), in rotational motion about a fixed axis it should be \(\tau d \theta\), since we already know the correspondence \({d} x \rightarrow {~d} \theta\) and \(F \rightarrow \tau\).
Work done by torque
Consider a rigid body acted upon by a force \(F\) at a perpendicular distance \(r\) from the axis of rotation. Let under the action of this force, the body rotates through an angle \(d \theta\).
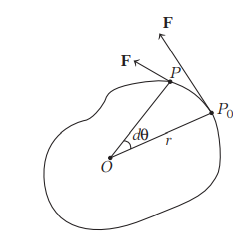
Work done \(=\) Torque × Displacement \(=\tau \boldsymbol{d} \theta\)
The power associated with the work done by a torque acting on a rotating body is given by
\(
\text { Power } P=\frac{d W}{d t}=\tau \frac{d \theta}{d t}=\tau \omega
\)
where, \(\tau \omega\) is also known as instantaneous rotational power. The work done in an infinitesimal angular displacement \(d \theta\) is
\(
d W=P d t=\tau \omega d t=\tau d \theta \dots(i)
\)
The work done in a finite angular displacement \(\theta_1\) to \(\theta_2\) is
\(
W=\int_{\theta_1}^{\theta_2} \tau d \theta
\)
If there are more than one forces acting on the body, the work done by all of them can be added to give the total work done on the body. Denoting the magnitudes of the torques due to the different forces as \(\tau_1, \tau_2, \ldots\) etc.
\(
\mathrm{d} W=\left(\tau_1+\tau_2+\ldots\right) \mathrm{d} \theta
\)
Remember, the forces giving rise to the torques act on different particles, but the angular displacement \(\mathrm{d} \theta\) is the same for all particles. Since all the torques considered are parallel to the fixed axis, the magnitude \(\tau\) of the total torque is just the algebraic sum of the magnitudes of the torques, i.e., \(\tau=\tau_1+\tau_2+\ldots\). . We, therefore, have
\(
\mathrm{d} W=\left(\tau_1+\tau_2+\ldots\right) \mathrm{d} \theta
\)
Dividing both sides of Eq. (i) by \({d} t\) gives
\(
\begin{aligned}
& P=\frac{\mathrm{d} W}{\mathrm{~d} t}=\tau \frac{\mathrm{d} \theta}{\mathrm{~d} t}=\tau \omega \\
& \text { or } P=\tau \omega \dots(ii)
\end{aligned}
\)
This is the instantaneous power. Compare this expression for power in the case of rotational motion about a fixed axis with the expression for power in the case of linear motion,
\(
P=F v
\)
In a perfectly rigid body there is no internal motion. The work done by external torques is the refore, not dissipated and goes on to increase the kinetic energy of the body. The rate at which work is done on the body is given by Eq. (ii). This is to be equated to the rate at which kinetic energy increases. The rate of increase of kinetic energy is
\(
\frac{\mathrm{d}}{\mathrm{~d} t}\left(\frac{I \omega^2}{2}\right)=I \frac{(2 \omega)}{2} \frac{\mathrm{~d} \omega}{\mathrm{~d} t}
\)
We assume that the moment of inertia does not change with time. This means that the mass of the body does not change, the body remains rigid and also the axis does not change its position with respect to the body.
Since \(\alpha=\mathrm{d} \omega / \mathrm{d} t\), we get
\(
\frac{\mathrm{d}}{\mathrm{~d} t}\left(\frac{I \omega^2}{2}\right)=I \omega \alpha
\)
Equating rates of work done and of increase in kinetic energy.
\(
\tau \omega=I \omega \alpha
\)
\(
\tau=I \alpha \dots(iii)
\)
Eq. (iii) is similar to Newton’s second law for linear motion expressed symbolically as
\(
F=m a
\)
Just as force produces acceleration, torque produces angular acceleration in a body. The angular acceleration is directly proportional to the applied torque and is inversely proportional to the moment of inertia of the body. Eq.(iii) can be called Newton’s second law for rotation about a fixed axis.
Comparison of Translational and Rotational Motion
\(\begin{array}{|ll|l|}
\hline & \text { Linear Motion } & \text { Rotational Motion about a Fixed Axis } \\
\hline \\
1 & \text { Displacement } x & \text { Angular displacement } \theta \\
2 & \text { Velocity } v=\mathrm{d} x / \mathrm{d} t & \text { Angular velocity } \omega=\mathrm{d} \theta / \mathrm{d} t \\
3 & \text { Acceleration } a=\mathrm{d} v / \mathrm{d} t & \text { Angular acceleration } \alpha=\mathrm{d} \omega / \mathrm{d} t \\
4 & \text { Mass } M & \text { Moment of inertia } I \\
5 & \text { Force } F=M a & \text { Torque } \tau=I \alpha \\
6 & \text { Work } d W=F \mathrm{ds} & \text { Work } W=\tau d \theta \\
7 & \text { Kinetic energy } K=M v^2 / 2 & \text { Kinetic energy } K=I \omega^2 / 2 \\
8 & \text { Power } P=F v & \text { Power } P=\tau \omega \\
9 & \text { Linear momentum } p=M v & \text { Angular momentum } L=I \omega \\
\hline
\end{array}
\)
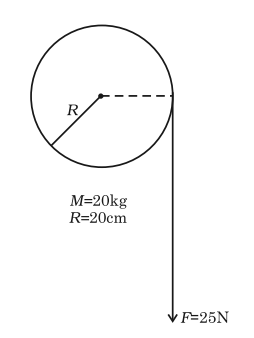
Example 1: A cord of negligible mass is wound round the rim of a fly wheel of mass 20 kg and radius 20 cm. A steady pull of 25 N is applied on the cord as shown in Figure below. The flywheel is mounted on a horizontal axle with frictionless bearings.
(a) Compute the angular acceleration of the wheel.
(b) Find the work done by the pull, when 2 m of the cord is unwound.
(c) Find also the kinetic energy of the wheel at this point. Assume that the wheel starts from rest.
(d) Compare answers to parts (b) and (c).
Solution: (a)
(\(
\begin{aligned}
\text { We use } & I \alpha=\tau \\
\text { the torque } & \tau=F R \\
& =25 \times 0.20 \mathrm{Nm}(\text { as } R=0.20 \mathrm{~m}) \\
& =5.0 \mathrm{Nm}
\end{aligned}
\)
\(
\begin{aligned}
& I=\mathrm{M} . \mathrm{I} . \text { of flywheel about its axis }=\frac{M R^2}{2} \\
& =\frac{20.0 \times(0.2)^2}{2}=0.4 \mathrm{~kg} \mathrm{~m}^2 \\
& \begin{aligned}
\alpha & =\text { angular acceleration } \\
& =5.0 \mathrm{~N} \mathrm{~m} / 0.4 \mathrm{~kg} \mathrm{~m}^2=12.35 \mathrm{~s}^{-2}
\end{aligned}
\end{aligned}
\)
(b) Work done by the pull unwinding 2 m of the cord
\(
=25 \mathrm{~N} \times 2 \mathrm{~m}=50 \mathrm{~J}
\)
(c) Let \(\omega\) be the final angular velocity. The kinetic energy gained \(=\frac{1}{2} I \omega^2\), since the wheel starts from rest. Now,
\(
\omega^2=\omega_0^2+2 \alpha \theta, \quad \omega_0=0
\)
The angular displacement \(\theta=\) length of unwound string / radius of wheel
\(
\begin{aligned}
& =2 \mathrm{~m} / 0.2 \mathrm{~m}=10 \mathrm{rad} \\
& \omega^2=2 \times 12.5 \times 10.0=250(\mathrm{rad} / \mathrm{s})^2 \\
& \therefore K . E . \text { gained }=\frac{1}{2} \times 0.4 \times 250=50 \mathrm{~J}
\end{aligned}
\)
(d) The answers are the same, i.e. the kinetic energy gained by the wheel = work done by the force. There is no loss of energy due to friction.