6.7 Torque and angular momentum
Torque or the moment of a force
Torque is a twisting or rotational force that causes an object to rotate around an axis, like turning a wrench to loosen a bolt. Torque is a quantity which measures the capability of a force to rotate a body. Torque due to a force is also known as the moment of a force. Torque is the rotational analogue of force of linear motion. It is defined as the product of the force and the perpendicular distance between the line of action of the force and the axis of rotation. This perpendicular distance is known as the force arm.

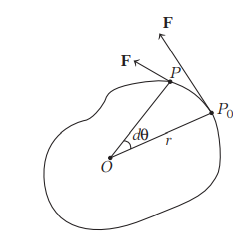
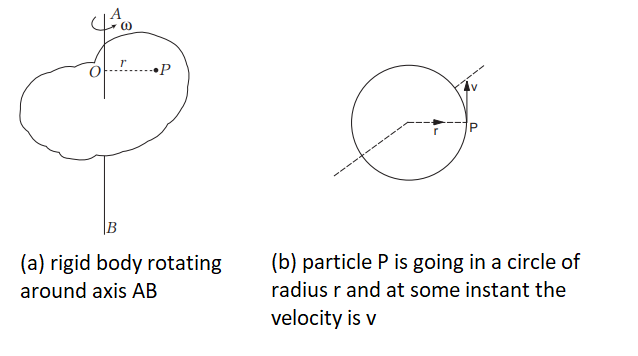
If a force acts on a single particle at a point P whose position with respect to the origin O is given by the position vector \(\mathbf{r}\) (shown in figure), the moment of the force (torque) acting on the particle with respect to the origin O is defined as the vector product
\(
\boldsymbol{\tau}=\mathbf{r} \times \mathbf{F}
\)
The moment of force (or torque) is a vector quantity. The symbol \(\boldsymbol{\tau}\) stands for the Greek letter tau. The magnitude of \(\boldsymbol{\tau}\) is
\(
\tau=r F \sin \theta
\)
where \(r\) is the magnitude of the position vector \(\mathbf{r}\), i.e. the length \(\mathrm{OP}, F\) is the magnitude of force \(\mathbf{F}\) and \(\theta\) is the angle between \(\mathbf{r}\) and \(\mathbf{F}\) as shown. The SI unit of torque is \(\mathrm{N}-\mathrm{m}\) and its dimensions are \(\left[\mathrm{ML}^2 \mathrm{~T}^{-2}\right]\).
The magnitude of the moment of force (torque) may be written
\(
\begin{aligned}
& \tau=(r \sin \theta) F=r_{\perp} F \\
& \text { or } \tau=r F \sin \theta=r F_{\perp}
\end{aligned}
\)
where \(r_{\perp}=r \sin \theta\) is the perpendicular distance of the line of action of \(\mathbf{F}\) from the origin and \(F_{\perp}(F \sin \theta)\) is the component of \(\mathbf{F}\) in the direction perpendicular to \(\mathbf{r}\). Note that \(\tau=0\) if \(r=0, F=0\) or \(\theta=0^{\circ}\) or \(180^{\circ}\). Thus, the moment of a force vanishes if either the magnitude of the force is zero, or if the line of action of the force passes through the origin.
Relation between Torque \((\tau)\), angular acceleration ( \(\alpha\) ) and moment of inertia ( \(I\) )
There is a mathematical relation between torque \(\boldsymbol{\tau}\), angular acceleration ( \(\boldsymbol{\alpha}\) ) and moment of inertia ( \(I\) ) and that can be given as \(\boldsymbol{\tau}=I \boldsymbol{\alpha}\)
The above expression is similar to the expression of Newton’s second law for translational motion (\(\mathbf{F}=m \mathbf{a}\)) with constant mass.
Just as a net force causes an object to accelerate linearly ( \(\mathbf{F}=m \mathbf{a}\) ), a net torque causes an object to accelerate angularly ( \(\boldsymbol{\tau}=I \boldsymbol{\alpha}\) ), with the moment of inertia (\(I\)) determining how much angular acceleration you get for a given torque.
Note: Translational motion is when an object moves from one place to another, with every point on the object traveling the same distance in the same direction, like a car on a road or a train on tracks, without rotating. It’s categorized as either linear (straightline) or curvilinear (curved-path), and it’s fundamental in physics for describing how objects change position, velocity, and acceleration, differing from rotational motion where an object spins.
Remarks
- If \(\theta=0^{\circ}\) or \(180^{\circ}\), the torque of force is zero.
- \(\boldsymbol{\tau}=\mathbf{r} \times \mathbf{F}\) is a vector product, so on reversing the direction of \(\mathbf{F}\), the direction of torque is reversed. If directions of both \(\mathbf{r}\) and \(\mathbf{F}\) are reversed, the direction of \(\boldsymbol{\tau}\) remains the same.
- If the total torque acting on the rigid body vanishes, i.e. the vector sum of the torques on the rigid body is zero.
\(
\boldsymbol{\tau_1}+\boldsymbol{\tau_2}+\boldsymbol{\tau_3} \ldots \boldsymbol{\tau_n}=\sum_{i=1}^n \boldsymbol{\tau_i}=0
\)
Then, the body is said to be in rotational equilibrium.
Example 1: Find the torque of a force \(\mathbf{F}=(\hat{\mathbf{i}}+2 \hat{\mathbf{j}}-3 \hat{\mathbf{k}}) N\) about a point \(O\). The position vector of point of application of force about \(O\) is \(\mathbf{r}=(2 \hat{\mathbf{i}}+3 \hat{\mathbf{j}}-\hat{\mathbf{k}}) m\).
Solution: Torque,
\(
\begin{aligned}
\boldsymbol{\tau} & =\mathbf{r} \times \mathbf{F}=\left|\begin{array}{rrr}
\hat{\mathbf{i}} & \hat{\mathbf{j}} & \hat{\mathbf{k}} \\
2 & 3 & -1 \\
1 & 2 & -3
\end{array}\right| \\
\tau & =\hat{\mathbf{i}}(-9+2)+\hat{\mathbf{j}}(-1+6)+\hat{\mathbf{k}}(4-3) \\
\tau & =(-7 \hat{\mathbf{i}}+5 \hat{\mathbf{j}}+\hat{\mathbf{k}}) \mathrm{N}-\mathrm{m}
\end{aligned}
\)
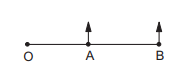
Example 2: The body in figure shown is pivoted at \(O\) and two forces act on it as shown.
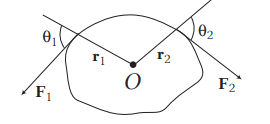
(i) Find an expression of the net torque on the body about the pivot.
(ii) If \(r_1=1.30 \mathrm{~m}, r_2=2.15 \mathrm{~m}, F_1=4.20 \mathrm{~N}, F_2=4.90 \mathrm{~N}, \theta_1=75^{\circ}\) and \(\theta_2=60^{\circ}\), what is the net torque about the pivot?
Solution: (i) Take a torque that tends to cause a counter clockwise rotation from rest to be positive and a torque that tends to cause a clockwise rotation from rest to be negative. Thus, a positive torque of magnitude \(r_1 F_1 \sin \theta_1\) is associated with \(\mathrm{F}_1\) and a negative torque of magnitude \(r_2 F_2 \sin \theta_2\) is associated with \(\mathbf{F}_2\). Both of these are about \(O\). The net torque about \(O\) is \(\tau=\tau_1+\tau_2=r_1 F_1 \sin \theta_1-r_2 F_2 \sin \theta_2\).
(ii) Substituting the given values in above equation, we get
\(
\begin{aligned}
\tau & =(1.30 \mathrm{~m})(4.20 \mathrm{~N}) \sin 75^{\circ}-(2.15 \mathrm{~m})(4.90 \mathrm{~N}) \sin 60^{\circ} \\
& =-3.85 \mathrm{~N}-\mathrm{m}
\end{aligned}
\)
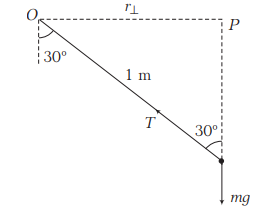
Example 3: A small ball of mass 1 kg is attached to one end of a \(1 m\) long massless string and the other end of the string is hung from a point. When the resulting pendulum is \(30^{\circ}\) from the vertical, what is the magnitude of torque about the point of suspension? [Take, \(g=10 \mathrm{~ms}^{-2}\) ]
Solution: Two forces are acting on the ball
(i) tension ( \(T\) )
(ii) weight \((\mathrm{mg})\)
Torque of tension about point \(O\) is zero, as it passes through \(O\).
Step 1: Calculate the magnitude of the force
The force acting on the ball is due to gravity. The magnitude of this force ( \(F\) ) is given by \(F=m g\), where \(m\) is the mass and \(g\) is the acceleration due to gravity.
We are given \(m=1 \mathrm{~kg}\) and \(\mathrm{g}=10 \mathrm{~ms}^{-2}\).
\(
F=(1 \mathrm{~kg})\left(10 \mathrm{~ms}^{-2}\right)=10 \mathrm{~N}
\)
Step 2: Calculate the magnitude of the torque
The magnitude of the torque ( \(\tau\) ) about the suspension point is calculated using the formula \(\tau_{m g}=r_{\perp} \boldsymbol{F}=r F \sin (\theta)\), where \(\boldsymbol{r}\) is the length of the string, \(\boldsymbol{F}\) is the force applied, and \(\boldsymbol{\theta}\) is the angle between the position vector and the force vector. The position vector points along the string, and the force of gravity points vertically downward. The angle between them is the given \(30^{\circ}\) from the vertical.
We are given \(r=L=1 \mathrm{~m}\) and \(\theta=30^{\circ}\).
\(
\therefore \quad \tau_{m g}=r F \sin (\theta)=(1)(10)(0.5)=5 \mathrm{~N}-\mathrm{m}
\)
Example 4: A solid flywheel of mass 20 kg and radius 120 mm revolves at \(600 \mathrm{rev} \mathrm{min}^{-1}\). With what force must a brake lining be pressed against it for the flywheel to stop in \(3 s\), if the coefficient of friction is 0.1?
Solution: Step 1: Convert units and calculate angular velocity
First, convert the radius to meters and the initial angular velocity from revolutions per minute (rev min \({ }^{-1}\) ) to radians per second (rad s \({ }^{-1}\) ).
\(
\begin{gathered}
r=120 \mathrm{~mm}=0.12 \mathrm{~m} \\
\omega_0=600 \mathrm{rev~min}^{-1} \times \frac{2 \pi \mathrm{~rad}}{1 \mathrm{rev}} \times \frac{1 \mathrm{~min}}{60 \mathrm{~s}}=20 \pi \mathrm{rads}^{-1}
\end{gathered}
\)
Step 2: Calculate angular deceleration
Using the angular kinematic equation \(\omega=\omega_0+\alpha t\), where the final angular velocity \(\omega\) is 0, we can find the angular deceleration \(\alpha\).
\(
\begin{aligned}
& 0=20 \pi+\alpha(3 \mathrm{~s}) \\
& \alpha=-\frac{20 \pi}{3} \mathrm{~rads}^{-2}
\end{aligned}
\)
The magnitude of the angular deceleration is \(\frac{20 \pi}{3} \mathrm{rads}^{-2}\).
Step 3: Calculate the moment of inertia and torque
For a solid flywheel (disk), the moment of inertia \(I\) is given by \(I=\frac{1}{2} m r^2\). The required torque \(\tau\) is then calculated using Newton’s second law for rotation, \(\tau=I \boldsymbol{\alpha}\).
\(
\begin{gathered}
I=\frac{1}{2}(20 \mathrm{~kg})(0.12 \mathrm{~m})^2=0.144 \mathrm{~kg} \cdot \mathrm{~m}^2 \\
\tau=I \alpha=\left(0.144 \mathrm{~kg} \cdot \mathrm{~m}^2\right)\left(\frac{20 \pi}{3} \mathrm{rads}^{-2}\right)=0.96 \pi \mathrm{~N} \cdot \mathrm{~m}
\end{gathered}
\)
Step 4: Calculate the required force
The torque is generated by the friction force \(f\) acting at the radius \(r(\tau=f r)\). The friction force is related to the normal force \(F\) by \(f=\mu F\). Combining these equations allows us to solve for \(F\).
\(
\begin{gathered}
f=\frac{\tau}{r}=\frac{0.96 \pi \mathrm{~N} \cdot \mathrm{~m}}{0.12 \mathrm{~m}}=8 \pi \mathrm{~N} \\
F=\frac{f}{\mu}=\frac{8 \pi \mathrm{~N}}{0.1}=80 \pi \mathrm{~N}=251 \mathrm{~N}
\end{gathered}
\)
The force that must be pressed against the brake lining is approximately \(\mathbf{2 5 1 ~ N}\).
Example 5: A wheel of radius 10 cm can rotate freely about its centre as shown in figure below. A string is wrapped over its rim and is pulled by a force of 5.0 N. It is found that the torque produces an angular acceleration \(2.0 \mathrm{rad} / \mathrm{s}^2\) in the wheel. Calculate the moment of inertia of the wheel.

Solution: Given, Radius of the wheel: \(r=10 \mathrm{~cm}=0.10 \mathrm{~m}\)
Pulling force: \(F=5.0 \mathrm{~N}\)
Angular acceleration: \(\alpha=2.0 \mathrm{rad} \mathrm{s}^{-2}\)
Identify Forces: The forces acting on the wheel are gravity ( \({W}\) ), the normal force from the support at the center (N), and the tension force (F).
Calculate Torques:
The torques due to \({W}\) and \({N}\) are zero because these forces act at the axis of rotation (the center):
The torques due to forces \({W}\) (weight) and \({N}\) (normal force) are zero when they act at the axis of rotation (the center) because the distance \({r}\) from the axis of rotation to the point of force application is zero.
Since \(r=0\), the magnitude of the torque becomes:
\(
\tau=(0) F \sin (\theta)=0
\)
The torque due to the tension force \(\mathbf{F}\) is \(\boldsymbol{\tau}=\boldsymbol{F} \boldsymbol{r}\), where \(\boldsymbol{r}\) is the radius (or lever arm).
Since the string is wrapped around the rim, the force acts tangentially.
\(
\tau=F r=5.0 \times 0.10=0.50 \mathrm{~N} \mathrm{~m}
\)
Use the rotational equation of motion
\(
\begin{gathered}
\tau=I \alpha \\
I=\frac{\tau}{\alpha} \\
I=\frac{0.50}{2.0}=0.25 \mathrm{~kg} \mathrm{~m}^2
\end{gathered}
\)
Note: The formula simplifies to \(\tau=F r\) only when the force is applied at a \(90^{\circ}\) angle (perpendicular) to the radius vector. In this case, \(\sin (\theta)=\sin \left(90^{\circ}\right)=1\), maximizing the torque for a given \(\boldsymbol{F}\) and \(\boldsymbol{r}\). The lever arm is formally defined as the perpendicular distance from the axis of rotation to the line of action of the force, which is precisely \(r \sin (\theta)\). When the force is already perpendicular to the radius, the lever arm is simply \(r\).
Example 6: The wheel of a motor, accelerated uniformly from rest, rotates through 2.5 radian during the first second. Find the angle rotated during the next second.
Solution: As the angular acceleration is constant, we have
\(
\theta=\omega_0 t+\frac{1}{2} \alpha t^2=\frac{1}{2} \alpha t^2
\)
Thus,
\(
\begin{aligned}
2 \cdot 5 \mathrm{rad} & =\frac{1}{2} \alpha(1 \mathrm{~s})^2 \\
\alpha & =5 \mathrm{rad} / \mathrm{s}^2
\end{aligned}
\)
or, \(\quad \alpha=5 \mathrm{rad} / \mathrm{s}^2\).
The angle rotated during the first two seconds is
\(
=\frac{1}{2} \times\left(5 \mathrm{rad} / \mathrm{s}^2\right)(2 \mathrm{~s})^2=10 \mathrm{rad} .
\)
Thus, the angle rotated during the 2nd second is
\(
10 \mathrm{rad}-2.5 \mathrm{rad}=7.5 \mathrm{rad}
\)
Example 7: A wheel having moment of inertia \(2 \mathrm{~kg}-\mathrm{m}^2\) about its axis, rotates at 50 rpm about this axis. Find the torque that can stop the wheel in one minute.
Solution: The initial angular velocity
\(
=50 \mathrm{rpm}=\frac{5 \pi}{3} \mathrm{rad} / \mathrm{s} .
\)
Using \(\omega=\omega_0+\alpha t\),
\(
\alpha=\frac{\omega-\omega_0}{t}=\frac{0-\frac{5 \pi}{3}}{60} \mathrm{rad} / \mathrm{s}^2=-\frac{\pi}{36} \mathrm{rad} / \mathrm{s}^2
\)
The torque that can produce this deceleration is
\(
\tau=I|\alpha|=\left(2 \mathrm{~kg}-\mathrm{m}^2\right)\left(\frac{\pi}{36} \mathrm{rad} / \mathrm{s}^2\right)=\frac{\pi}{18} \mathrm{~N}-\mathrm{m}
\)
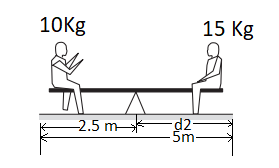
Example 8: Two small kids weighing 10 kg and 15 kg respectively are trying to balance a seesaw of total length 5.0 m , with the fulcrum at the centre. If one of the kids is sitting at an end, where should the other sit?
Solution: Step 1: Define Equilibrium Condition and Variables
For the seesaw to be in rotational equilibrium, the sum of the counterclockwise torques must equal the sum of the clockwise torques relative to the fulcrum. The torque \((\tau)\) is defined as the force ( \(F\) ) multiplied by the perpendicular distance ( \(d\) ) from the fulcrum: \(\tau=F d\). The force due to each child is their mass \((m)\) times the acceleration due to gravity (g), so \(F=m g\).
The equilibrium condition is \(\tau_1=\tau_2\), which expands to \(m_1 g d_1=m_2 g d_2\). The \(g\) on both sides cancels, leaving the condition \(m_1 d_1=m_2 d_2\). \(\theta\)
Step 2: Calculate the Required Distance
We are given \(m_1=10 \mathrm{~kg}, m_2=15 \mathrm{~kg}\), and the total length is 5.0 m with the fulcrum at the center. The first child sits at an end, so their distance \(\boldsymbol{d}_1\) is \(5.0 \mathrm{~m} / 2=2.5 \mathrm{~m}\). We can now solve for the second child’s distance \(\boldsymbol{d}_2\) :
\(
\begin{gathered}
10 \mathrm{~kg} \times 2.5 \mathrm{~m}=15 \mathrm{~kg} \times d_2 \\
25 \mathrm{~kg} \cdot \mathrm{~m}=15 \mathrm{~kg} \times d_2 \\
d_2=\frac{25 \mathrm{~kg} \cdot \mathrm{~m}}{15 \mathrm{~kg}} \\
d_2=\frac{5}{3} \mathrm{~m}
\end{gathered}
\)
The 15 kg child should sit \(\frac{5}{3} \mathrm{~m}\) (approximately 1.67 m ) from the fulcrum.
Example 9: A uniform ladder of mass 10 kg leans against a smooth vertical wall making an angle of \(53^{\circ}\) with it. The other end rests on a rough horizontal floor. Find the normal force and the frictional force that the floor exerts on the ladder.
Solution:
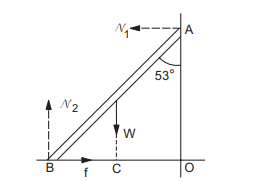
The forces acting on the ladder are shown in figure above. They are
(a) its weight \(W\),
(b) normal force \(N_1\) by the vertical wall,
(c) normal force \(N_2\) by the floor and
(d) frictional force \(f\) by the floor.
Taking horizontal and vertical components
Step 1: Analyze Forces and Equilibrium Conditions
The ladder is in static equilibrium, meaning the net external force and net external torque are zero.
Horizontal equilibrium requires the normal force from the wall ( \({N}_{{1}}\) ) to balance the frictional force from the floor (\(f\)):
\(
N_1=f \dots(i)
\)
Vertical equilibrium requires the upward normal force from the floor \(\left({N}_{{2}}\right)\) to balance the downward weight (\(W\)):
\(
N_2=W \dots(ii)
\)
Step 2: Calculate Torque About Point B (Base of Ladder)
To find the relationship between \(N_1\) and \(W\), we calculate the net torque about the point where the ladder touches the floor (Point \({B}\) ). This eliminates the torques caused by \({N}_2\) and \(f\), as their lines of action pass through \({B}\). The weight \({W}\) creates a clockwise torque, and the normal force \({N}_{{1}}\) creates a counter-clockwise torque.
The angle \(53^{\circ}\) is with the vertical wall. The torque about \(B\) is calculated using the perpendicular components of distance and force, or force components and distance.
Taking torque about point \(B\),
\(
N_1(A O)=W(C B)
\)
\(
N_1(A B) \cos 53^{\circ}=W \frac{A B}{2} \sin 53^{\circ}
\)
\(
\begin{aligned}
{N}_1 \frac{3}{5} & =\frac{W}{2} \frac{4}{5} \\
{N}_1 & =\frac{2}{3} W \dots(iii)
\end{aligned}
\)
The normal force by the floor is
\(
N_2=W=(10 \mathrm{~kg})\left(9 \cdot 8 \mathrm{~m} / \mathrm{s}^2\right)=98 \mathrm{~N} .
\)
The frictional force is
\(
f=N_1=\frac{2}{3} W=65 \mathrm{~N}
\)
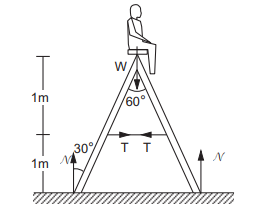
Example 10: The ladder shown in figure below has negligible mass and rests on a frictionless floor. The crossbar connects the two legs of the ladder at the middle. The angle between the two legs is \(60^{\circ}\). The fat person sitting on the ladder has a mass of 80 kg. Find the contact force exerted by the floor on each leg and the tension in the crossbar.
Solution: Step 1: Calculate the contact force on each leg
The system is in vertical equilibrium, so the sum of the vertical contact forces ( \(N\) ) from the floor on both legs balances the total weight of the person ( \(W=m g\) ). The floor is frictionless, so there are no horizontal forces at the floor. The contact forces are purely vertical (normal forces).
\(
2 N=W=m g
\)
Using \(g=9.8 \mathrm{~m} / \mathrm{s}^2\) :
\(
\begin{gathered}
W=80 \mathrm{~kg} \times 9.8 \mathrm{~m} / \mathrm{s}^2=784 \mathrm{~N} \\
N=\frac{784 \mathrm{~N}}{2}=392 \mathrm{~N}
\end{gathered}
\)
\(N=392 \mathrm{~N}\) on each leg.
Step 2: Tension in the crossbar:
Now analyze one leg only.
Forces on one leg:
Normal force \(N=392 \mathrm{~N}\) upward at the floor
Tension \(T\) from the crossbar (horizontal)
Let, Length of one leg \(=L\)
Crossbar attached at the midpoint ⇒ distance from top \(=L / 2\)
Angle with vertical \(=30^{\circ}\)
Step 3: Fix the pivot and the leg: Take the left leg and choose the top hinge as the pivot.
Torque magnitude about the pivot is
\(
\tau=F \times \text { (perpendicular distance to line of action) }
\)
Step 4: Horizontal distance from top to bottom:
\(
\text { Horizontal distance (base) } =L \sin 30^{\circ}=\frac{L}{2}
\)
Vertical distance from top to midpoint:
\(
\frac{L}{2} \cos 30^{\circ}=\frac{\sqrt{3} L}{4}
\)
Torque equilibrium about the top:
Clockwise torque = Counterclockwise torque
\(
N\left(\frac{L}{2}\right)=T\left(\frac{\sqrt{3} L}{4}\right)
\)
\(
T=\frac{2 N}{\sqrt{3}}
\)
Substitute \(N=392 \mathrm{~N}\) :
\(
T=\frac{2 \times 392}{\sqrt{3}} \approx 4.53 \times 10^2 \mathrm{~N}\approx 450 \mathrm{~N}
\)
Explanation: Apply it to your diagram Left Leg:
Normal force \(N\):
Pivot: top joint
\(\vec{r}\) : from top → bottom (down and left)
\(\vec{F}=N\) : upward
Right-hand rule:
Fingers: down-left
Curl: upward
Thumb: out of the page
Normal force produces CCW torque.
Tension \(T\):
\(\vec{r}\) : from top → midpoint (down and left)
\(\vec{F}=T\) : to the right
Right-hand rule:
Fingers: down-left
Curl: right
Thumb: into the page
Tension produces CW torque.
Work done by torque
Consider a rigid body acted upon by a force \(F\) at a perpendicular distance \(r\) from the axis of rotation. Let under the action of this force, the body rotates through an angle \(d \theta\).
Work done \(=\) Torque × Displacement \(=\tau \boldsymbol{d} \theta\)
The power associated with the work done by a torque acting on a rotating body is given by
\(
\text { Power } P=\frac{d W}{d t}=\tau \frac{d \theta}{d t}=\tau \omega
\)
where, \(\tau \omega\) is also known as instantaneous rotational power. The work done in an infinitesimal angular displacement \(d \theta\) is
\(
d W=P d t=\tau \omega d t=\tau d \theta
\)
The work done in a finite angular displacement \(\theta_1\) to \(\theta_2\) is
\(
W=\int_{\theta_1}^{\theta_2} \tau d \theta
\)
Example 11: To maintain a rotor at a uniform angular speed of \(100 \mathrm{rad} \mathrm{s}^{-1}\), an engine needs to transmit a torque of \(200 N-m\). What is the power required by engine? Assume efficiency of engine is \(100 \%\).
Solution: Work done by torque in turning rotor by an angle \(d \theta\) is \(\tau d \theta\), so power delivered by engine,
\(
\begin{aligned}
& P=\frac{\text { Work done }}{\text { Time taken }}=\tau \frac{d \theta}{d t}(d t=\text { time taken for turning by angle } d \theta) \\
& \qquad \begin{aligned}
& P=\tau \omega \\
& \text { So, power required }=200 \times 100=20000 \mathrm{~W} \\
&=20 \mathrm{~kW} \quad[\because 1 \mathrm{~kW}=1000 \mathrm{~W}]
\end{aligned}
\end{aligned}
\)
Example 12: The power output of an automobile engine is advertised to be 200 HP at 6000 rpm. What is the corresponding torque?
Solution: \(P=200 \mathrm{HP}=200 \times 746 [\because 1 \mathrm{HP}=746 \mathrm{~W}]\)
\(
\begin{aligned}
& =1.49 \times 10^5 \mathrm{~W} \\
\omega & =6000 \mathrm{rev} / \mathrm{min} \\
& =6000 \times \frac{2 \pi}{60}=628 \mathrm{rad} / \mathrm{s} \\
\tau & =\frac{P}{\omega}=\frac{1.49 \times 10^5}{628}=2.37 .3 \mathrm{~N}-\mathrm{m}
\end{aligned}
\)
Example 13: A flywheel of moment of inertia \(10 \mathrm{~kg}-\mathrm{m}^2\) is rotating at \(50 \mathrm{rad} / \mathrm{s}\). It must be brought to rest in 10 s.
(i) How much work must be done to stop it?
(ii) What is the required average power?
Solution: (i) Given, \(\omega_0=50 \mathrm{rad} / \mathrm{s}\) and \(t=10 \mathrm{~s}\)
From the equation, \(\omega=\omega_0-\alpha t\)
\(
\begin{aligned}
& 0=50-\alpha \times 10 \\
& \alpha=5 \mathrm{rad} / \mathrm{s}^2
\end{aligned}
\)
Again,
\(
\begin{aligned}
\theta & =\omega_0 t-\frac{1}{2} \alpha t^2=50 \times 10-\frac{1}{2} \times 5 \times(10)^2 \\
& =500-250=250 \mathrm{rad}
\end{aligned}
\)
Retarding torque, \(\tau=I \alpha=10 \times 5=50 \mathrm{~N}-\mathrm{m}\)
Work done by retarding torque,
\(
W=\tau \theta=50 \times 250=12500 \mathrm{~J}
\)
(ii) Required average power,
\(
P=\frac{W}{t}=\frac{12500}{10}=1250 \mathrm{~W}
\)
Angular Momentum
A mass moving in a straight line has linear momentum (\(p\)). When a mass rotates about some point/axis, there is momentum associated with rotational motion called the angular momentum (\(L\)). Just as net external force is required to change the linear momentum of an object, a net external torque is required to change the angular momentum of an object.
Angular momentum of a particle about some point
Angular momentum of a particle (of mass \(m\) ) about a point is defined as the moment of its linear momentum (\(p\)) about the point.
\(
\mathbf{L}=\mathbf{r} \times \mathbf{p}=\mathbf{r} \times(m \mathbf{v})=m(\mathbf{r} \times \mathbf{v})
\)
Angular momentum of a particle about some point
Angular momentum of a particle (of mass \(m\) ) about a point is defined as the moment of its linear momentum (\(p\)) about the point.
\(
\mathbf{L}=\mathbf{r} \times \mathbf{p}=\mathbf{r} \times(m \mathbf{v})=m(\mathbf{r} \times \mathbf{v})
\)
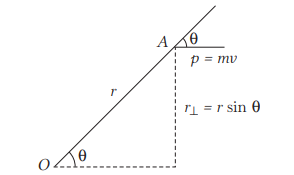
Here, \(\mathbf{r}\) is the radius vector of particle \(A\) about \(O\) at that instant of time. The magnitude of \(\mathbf{L}\) is
\(
L=m v r \sin \theta=m v r_{\perp}
\)
Here, \(r_{\perp}=r \sin \theta\) is the perpendicular distance of line of action of velocity \(\mathbf{v}\) from point \(O\). The direction of \(\mathbf{L}\) is same as that of \(\mathbf{r} \times \mathbf{v}\). where \({\theta}\) is the angle between the position vector \(\mathbf{r}\) and the linear momentum vector \(\mathbf{p}\) (or velocity vector \(\mathbf{v}\) ). The direction of the angular momentum vector is perpendicular to the plane formed by \(\mathbf{r}\) and \(\mathbf{p}\), and can be determined using the right-hand rule. This is shown in figure below.
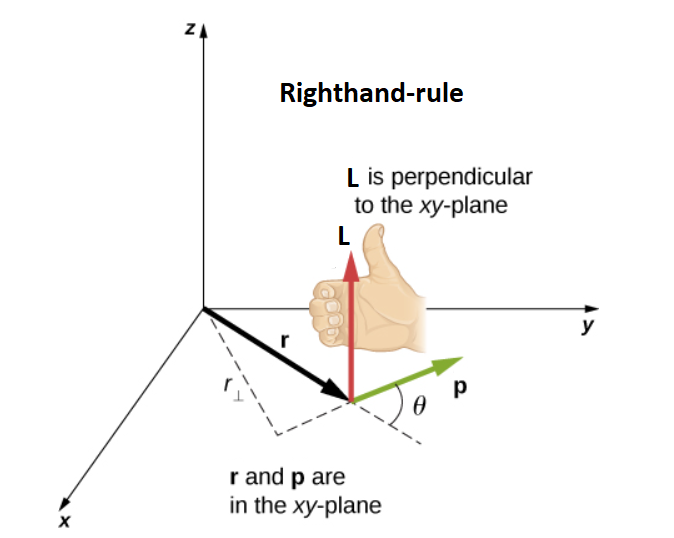
The SI unit of angular momentum is \(\mathrm{kg}-\mathrm{m}^2 \mathrm{~s}^{-1}\) and its dimensions are \(\left[\mathrm{ML}^2 \mathrm{~T}^{-1}\right]\).
Important concept related to angular momentum
Angular momentum is given by \(\mathbf{L}=\mathbf{r} \times \mathbf{p}\)
We can obtain the three rectangular components of angular momentum, i.e. \(L_x, L_y\) and \(L_z\) as we did in the case of torque.
\(
\begin{aligned}
& \mathbf{L}=L_x \hat{\mathbf{i}}+L_y \hat{\mathbf{j}}+L_z \hat{\mathbf{k}} \\
& \mathbf{r}=x \hat{\mathbf{i}}+y \hat{\mathbf{j}}+z \hat{\mathbf{k}} \\
& \mathbf{p}=p_x \hat{\mathbf{i}}+p_y \hat{\mathbf{j}}+p_z \hat{\mathbf{k}}
\end{aligned}
\)
Using determinant method, we get
\(
\begin{aligned}
\mathbf{L}=\left(L_x \hat{\mathbf{i}}+L_y \hat{\mathbf{j}}+L_z \hat{\mathbf{k}}\right) & =\left|\begin{array}{ccc}
\hat{\mathbf{i}} & \hat{\mathbf{j}} & \hat{\mathbf{k}} \\
x & y & z \\
p_x & p_y & p_z
\end{array}\right| \\
& =\left(y p_z-z p_y\right) \hat{\mathbf{i}}+\left(z p_x-x p_z\right) \hat{\mathbf{j}}+\left(x p_y-y p_x\right) \hat{\mathbf{k}}
\end{aligned}
\)
Comparing the components of both sides, we get
\(
\begin{aligned}
& L_x=\left(y p_z-z p_y\right) \\
& L_y=\left(z p_x-x p_z\right) \\
& L_z=\left(x p_y-y p_x\right)
\end{aligned}
\)
If the particle is moving in \(y z\)-plane, it has the angular momentum component only in \(x\)-direction,
i.e. \(\mathrm{L}_y=\mathrm{L}_z=0\) and \(\mathrm{L}_x \neq 0\).
Similarly, if the particle is moving in \(x z\)-plane, \(L_y \neq 0, L_x=L_z=0\) and if the particle is moving in \(x y\)-plane only, \(L_z \neq 0, L_x=L_y=0\).
Example 14: A car of mass 300 kg is travelling on a circular track of radius \(100 m\) with a constant speed of \(60 \mathrm{~m} / \mathrm{s}\). Calculate the angular momentum.
Solution: Momentum, \(p=m v=300 \times 60=18000 \mathrm{~kg}-\mathrm{m} / \mathrm{s}\)
(directed along the tangent to the circle)
\(
\begin{aligned}
& \text { Angular momentum, } \mathbf{L}=\mathbf{r} \times \mathbf{p} \\
& \therefore \quad L=r p \sin \theta \quad\left(\text { Here, } \theta=90^{\circ}\right) \\
& \therefore \quad L=r p=100 \times 18000=18 \times 10^5 \mathrm{~kg}-\mathrm{m}^2 \mathrm{~s}^{-1}
\end{aligned}
\)
Example 15: A particle of mass \(m\) is moving along the line \(y=b, z=0\) with constant speed \(v\). State whether the angular momentum of particle about origin is increasing, decreasing or constant.
Solution: Angular momentum of particle,
\(
\begin{aligned}
|\mathbf{L}| & =m v r \sin \theta \\
& =m v r_{\perp}=m v b\left(\text { Given } y=r_{\perp}=b\right)
\end{aligned}
\)
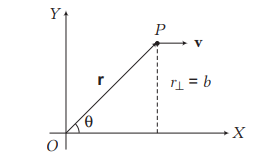
\(\therefore \quad|\mathbf{L}|=\) constant, as \(m, v\) and \(b\) all are constants.
Direction of \(\mathbf{r} \times \mathbf{v}\) also remains the same. Therefore, angular momentum of particle about origin remains constant with time.
Note: In this problem, | \(\mathbf{r} \mid\) is increasing, \(\theta\) is decreasing but \(r \sin \theta\), i.e. \(b\) remains constant. Hence, the angular momentum remains constant.
Example 16: A particle of mass \(m\) is projected with velocity \(v\) at an angle \(\theta\) with the horizontal. Find its angular momentum about the point of projection when it is at the highest point of its trajectory.
Solution: At the highest point, it has only horizontal velocity
\(
v_x=v \cos \theta \dots(i)
\)
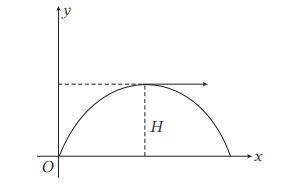
Length of the perpendicular to the horizontal velocity from \(O\) is the maximum height, where
\(
H_{\max }=\frac{v^2 \sin ^2 \theta}{2 g}
\)
\(
\begin{aligned}
\text { Angular momentum } & =m v r=m v_x H_{\max } \\
& =m v_x\left(\frac{v^2 \sin ^2 \theta}{2 g}\right) \\
& =\frac{m v^2 \sin ^2 \theta}{2 g} v \cos \theta \quad \text { [from Eq. (i)] } \\
& =\frac{m v^3 \sin ^2 \theta \cos \theta}{2 g}
\end{aligned}
\)
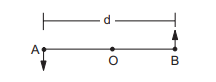
Example 17: Two small balls \(A\) and \(B\), each of mass \(m\), are attached rigidly to the ends of a light rod of length \(d\). The structure rotates about the perpendicular bisector of the rod at an angular speed \(\omega\). Calculate the angular momentum of the individual balls and of the system about the axis of rotation.
Solution: Distance from Axis ( \(r\) ): The axis is the perpendicular bisector (center) of the rod. Each ball is at an end, so its distance from the center is half the rod’s length: \(r=d / 2\).
Linear Velocity of Each Ball ( \(v\) ): Since \(v=r \omega\), each ball moves at \(v=(d / 2) \omega\).
Angular Momentum of One Ball ( \(\boldsymbol{L}_{\boldsymbol{A}}\) or \(\boldsymbol{L}_{\boldsymbol{B}}\) ):
Formula: \(L=m v r\) or \(L=I \omega=\left(m r^2\right) \omega\).
Calculation: \(L_A=m\left(\frac{d}{2}\right)\left(\frac{d}{2}\right) \omega=\frac{1}{4} m \omega d^2 \).
Total Angular Momentum of the System ( \(\boldsymbol{L}_{\text {sys }}\) ):
Formula: \(L_{s y s}=L_A+L_B\) (since they’re in the same direction).
Calculation: \(L_{s y s}=\frac{1}{4} m \omega d^2 +\frac{1}{4} m \omega d^2=\frac{1}{2} m \omega d^2 \).
Alternatively, using total moment of inertia: \(I_{s y s}=m(d / 2)^2+m(d / 2)^2=\frac{1}{2} m d^2\), so \(L_{s y s}=I_{s y s} \omega=\left(\frac{1}{2} m d^2\right) \omega\).
Angular Momentum of Ball A (or B): \(\frac{1}{4} m \omega d^2\)
Total Angular Momentum of the System: \(\frac{1}{2} m \omega d^2\)
Example 18: Two particles of mass \(m\) each are attached to a light rod of length \(d\), one at its centre and the other at a free end. The rod is fixed at the other end and is rotated in a plane at an angular speed \(\omega\). Calculate the angular momentum of the particle at the end with respect to the particle at the centre.
Solution: The situation is shown in figure below.
The velocity of the particle \(A\) with respect to the fixed end \(O\) is \(v_A=\omega\left(\frac{d}{2}\right)\) and that of \(B\) with respect to \(O\) is \(v_B=\omega d\). Hence the velocity of \(B\) with respect to \(A\) is \(v_B-v_A=\omega\left(\frac{d}{2}\right)\). The angular momentum of \(B\) with respect to \(A\) is, therefore,
\(
L=m v r=m \omega\left(\frac{d}{2}\right) \frac{d}{2}=\frac{1}{4} m \omega d^2
\)
along the direction perpendicular to the plane of rotation.
Example 19: A uniform circular disc of mass 200 g and radius 4.0 cm is rotated about one of its diameter at an angular speed of \(10 \mathrm{rad} / \mathrm{s}\). Find the kinetic energy of the disc and its angular momentum about the axis of rotation.
Solution: The moment of inertia of the circular disc about its diameter is
\(
\begin{aligned}
I & =\frac{1}{4} M r^2=\frac{1}{4}(0.200 \mathrm{~kg})(0.04 \mathrm{~m})^2 \\
& =8.0 \times 10^{-5} \mathrm{~kg}-\mathrm{m}^2
\end{aligned}
\)
The kinetic energy is
\(
\begin{aligned}
K & =\frac{1}{2} I \omega^2=\frac{1}{2}\left(8.0 \times 10^{-5} \mathrm{~kg}-\mathrm{m}^2\right)\left(100 \mathrm{rad}{ }^2 / \mathrm{s}^2\right) \\
& =4.0 \times 10^{-3} \mathrm{~J}
\end{aligned}
\)
and the angular momentum about the axis of rotation is
\(
\begin{aligned}
L & =I \omega=\left(8.0 \times 10^{-5} \mathrm{~kg}-\mathrm{m}^2\right)(10 \mathrm{rad} / \mathrm{s}) \\
& =8.0 \times 10^{-4} \mathrm{~kg}-\mathrm{m}^2 / \mathrm{s}=8.0 \times 10^{-4} \mathrm{~J}-\mathrm{s} .
\end{aligned}
\)
Example 20: A wheel rotating at an angular speed of \(20 \mathrm{rad} / \mathrm{s}\) is brought to rest by a constant torque in 4.0 seconds. If the moment of inertia of the wheel about the axis of rotation is \(0.20 \mathrm{~kg}-\mathrm{m}^2\), find the work done by the torque in the first two seconds.
Solution: The angular deceleration of the wheel during the 4.0 seconds may be obtained by the equation
\(
\omega=\omega_0-\alpha t
\)
\(
\alpha=\frac{\omega_0-\omega}{t}=\frac{20 \mathrm{rad} / \mathrm{s}}{4.0 \mathrm{~s}}=5.0 \mathrm{rad} / \mathrm{s}^2 .
\)
The torque applied to produce this deceleration is
\(
\tau=I \alpha=\left(0.20 \mathrm{~kg}-\mathrm{m}^2\right)\left(5.0 \mathrm{rad} / \mathrm{s}^2\right)=1.0 \mathrm{~N}-\mathrm{m} .
\)
The angle rotated in the first two seconds is
\(
\begin{aligned}
\theta & =\omega_0 t-\frac{1}{2} \alpha t^2 \\
& =(20 \mathrm{rad} / \mathrm{s})(2 \mathrm{~s})-\frac{1}{2}\left(5.0 \mathrm{rad} / \mathrm{s}^2\right)\left(4.0 \mathrm{~s}^2\right) \\
& =40 \mathrm{rad}-10 \mathrm{rad}=30 \mathrm{rad} .
\end{aligned}
\)
The work done by the torque in the first 2 seconds is, therefore,
\(
W=\tau \theta=(1 \cdot 0 \mathrm{~N}-\mathrm{m})(30 \mathrm{rad})=30 \mathrm{~J} .
\)
Angular momentum of a rigid body rotating about a fixed axis
The angular momentum of rigid body, i.e. a system of particles is the sum of angular momentum of all the particles within the system.
Suppose a particle \(P\) of mass \(m\) is going in a circle of radius \(r\) and at some instant the speed of the particle is \(v\). For finding the angular momentum of the particle about the axis of rotation, the origin may be chosen anywhere on the axis. We choose it at the centre of the circle. In this case, \(\mathbf{r}\) and \(\mathbf{p}\) are perpendicular to each other and \(\mathbf{r} \times \mathbf{p}\) is along the axis. Thus, component of \(\mathbf{r} \times \mathbf{p}\) along the axis is \(m v r\) itself. The angular momentum of the whole rigid body about \(A B\) is the sum of components of all particles, i.e. \(L=\sum_i m_i r_i v_i\)
\(\begin{array}{rlrl} & \text { Here, } v_i =r_i \omega \\ \therefore & L =\sum_i m_i r_i^2 \omega\end{array}\)
\(
L=\omega \sum_i m_i r_i^2
\)
\(L=I \omega \quad\left(\right.\) as \(\left.\sum_i m_i r_i^2=I\right)\)
Here, \(I\) is the moment of inertia of the rigid body about \(A B\).
Relation between torque and angular momentum
The relation between torque and angular momentum can be given as follows
As angular momentum, \(\mathbf{L =} \mathbf{r} \times \mathbf{p}\),
we differentiate \(\boldsymbol{L}=\mathbf{r} \times \mathbf{p}\) with respect to time,
\(
\frac{\mathrm{d} \boldsymbol{L}}{\mathrm{~d} t}=\frac{\mathrm{d}}{\mathrm{~d} t}(\mathbf{r} \times \mathbf{p})
\)
Applying the product rule for differentiation to the right hand side,
\(
\frac{\mathrm{d}}{\mathrm{~d} t}(\mathbf{r} \times \mathbf{p})=\frac{\mathrm{d} \mathbf{r}}{\mathrm{~d} t} \times \mathbf{p}+\mathbf{r} \times \frac{\mathrm{d} \mathbf{p}}{\mathrm{~d} t}
\)
Now, the velocity of the particle is \(\mathbf{v}=d \mathbf{r} / d t\) and \(\mathbf{p}=m \mathbf{v}\)
Because of this \(\frac{\mathrm{d} \mathbf{r}}{\mathrm{d} t} \times \mathbf{p}=\mathbf{v} \times m \mathbf{v}=0\), as the vector product of two parallel vectors vanishes. Further, since \(\mathrm{d} \mathbf{p} / \mathrm{d} t=\mathbf{F}\),
\(
\begin{aligned}
& \mathbf{r} \times \frac{\mathrm{d} \mathbf{p}}{\mathrm{~d} t}=\mathbf{r} \times \mathbf{F}=\mathbf{t} \\
& \text { Hence } \frac{\mathrm{d}}{\mathrm{~d} t}(\mathbf{r} \times \mathbf{p})=\tau_{\mathrm{ext}} \\
& \text { or } \frac{\mathrm{d} \boldsymbol{L}}{\mathrm{~d} t}=\boldsymbol{\tau_{\mathrm{ext}}}
\end{aligned}
\)
Thus, rate of change of angular momentum is equal to the torque due to an external force. This is the rotational analogue of the equation \(\mathbf{F}=\mathrm{d} \mathbf{p} / \mathrm{d} t\), which expresses Newton’s second law for the translational motion of a single particle.
Note: If the total external torque on a system is zero, its angular momentum remains constant. This is known as the principle of conservation of angular momentum.
Angular Impulse
\(
\text { Angular impulse }=\int \tau d t=\int d \mathbf{L}=\mathbf{L}_f-\mathbf{L}_i
\)
Hence, angular impulse of torque is equal to total change in angular momentum of the body in given time.
Example 21: A 40 kg flywheel in the form of a uniform circular disc of 1 m radius is making 120 rpm. Determine the angular momentum.
Solution: Here, \(M=40 \mathrm{~kg}, R=1 \mathrm{~m}, v=120 \mathrm{rpm}=\frac{120}{60} \mathrm{rps}=2 \mathrm{rps}\)
Now, moment of inertia, \(I=\frac{1}{2} M R^2=\frac{1}{2} \times 40 \times(1)^2=20 \mathrm{~kg}-\mathrm{m}^2\)
\(
\omega=2 \pi \nu=2 \pi \times 2=4 \pi \mathrm{rad} \mathrm{~s}^{-1}
\)
So, angular momentum, \(L=I \omega=20 \times 4 \pi=20 \times 4 \times 3.14\)
\(
L=251.2 \mathrm{~kg}-\mathrm{m}^2 \mathrm{~s}^{-1}
\)
Example 22: A torque of \(10 N-m\) is applied on a wheel having angular momentum of \(2 \mathrm{~kg}-\mathrm{m}^2 \mathrm{~s}^{-1}\), calculate the angular momentum of the wheel after \(4 s\).
Solution: Torque,
\(
\begin{aligned}
\tau & =\frac{d L}{d t} \\
\tau & =\frac{L_2-L_1}{t}
\end{aligned}
\)
Angular momentum of the wheel,
\(
\begin{aligned}
L_2 & =\tau t+L_1=10 \times 4+2 \\
& =40+2=42 \mathrm{~kg}-\mathrm{m}^2 \mathrm{~s}^{-1}
\end{aligned}
\)
Example 23: The diameter of a solid disc is \(0.5 m\) and its mass is 16 kg . What torque will increase its angular velocity from 0 to 120 rotations \(/ \min\) in \(8 s\) ?
Solution: Moment of inertia of solid disc,
\(
I=\frac{1}{2} M R^2=\frac{1}{2} \times 16 \times\left(\frac{0.5}{2}\right)^2=\frac{1}{2} \mathrm{~kg}-\mathrm{m}^2
\)
Given that initial momentum is 0 as disc starts from rest.
Angular velocity, \(\omega=\frac{120 \times 2 \pi}{60}=4 \pi \mathrm{rad} / \mathrm{s}\) and change in angular momentum, \(\Delta L=I \omega-0=I \omega\) Angular impulse, \(\tau \times t=\Delta L\)
\(
\Rightarrow \quad \tau=\frac{\Delta L}{t}=\frac{I \omega}{t}=\frac{1}{8} \times \frac{1}{2} \times 4 \pi=\frac{\pi}{4} \mathrm{~N}-\mathrm{m}
\)
Law of conservation of angular momentum
It states that when no external torque acts on an object or isolated system of objects, then no change of angular momentum occurs. Hence, the angular momentum before an event involving only internal torques or no torques is equal to the angular momentum after the event.
We know that, \(\tau_{\text {ext }}=\frac{d \mathbf{L}}{d t}\)
If \(\tau_{\text {ext }}=0\), then \(\frac{d \mathbf{L}}{d t}=0\) or \(\mathbf{L}\) must be a constant.
Therefore, in the absence of any external torque, the total angular momentum of a system must remain conserved.
As \(\mathbf{L}=I \omega\), the law of conservation of momentum leads us to the following conclusion.
For an isolated system, \(I \omega=\) constant
or \(I_1 \omega_1=I_2 \omega_2\)
This principle is often used by figure skaters, gymnasts, and dancers changing their rotational speed by altering their moment of inertia (e.g., pulling their limbs in to spin faster).
Cats rotating their bodies mid-air to land on their feet. Celestial mechanics, as described by Kepler’s second law, where planets sweep out equal areas in equal times due to constant angular momentum.
Quantum mechanics, where the Bohr model of the atom quantizes the angular momentum of electrons in their orbits.
Example 24: The maximum and minimum distances of a comet from sun are \(1.4 \times 10^{12} m\) and \(7 \times 10^{10} m\), respectively. If velocity nearest to sun is \(6 \times 10^4 \mathrm{~ms}^{-1}\), what is the velocity of comet when it is farthest from the sun?
Solution: Consider comet as a point mass and its path as circular. Applying conservation of angular momentum, \(I_1 \omega_1=I_2 \omega_2\)
We know, \(v=r \omega\)
\(
\begin{aligned}
\quad m r_1^2 \times \frac{v_1}{r_1} & =m r_2^2 \times \frac{v_2}{r_2} \Rightarrow v_1 r_1=v_2 r_2 \\
\Rightarrow \quad v_2 & =\frac{v_1 r_1}{r_2}=\frac{6 \times 10^4 \times 7 \times 10^{10}}{1.4 \times 10^{12}}=3000 \mathrm{~ms}^{-1}
\end{aligned}
\)
Example 25: A wheel of moment of inertia \(I\) and radius \(R\) is rotating about its axis at an angular speed \(\omega_0\). It picks up a stationary particle of mass \(m\) at its edge. Find the new angular speed of the wheel.
Solution: Step 1: Define Initial Angular Momentum and System Properties
The initial system consists of a wheel with moment of inertia I and initial angular speed \(\omega_0\). The initial angular momentum \(\left(L_i\right)\) is given by:
\(
L_i=I \omega_0
\)
Step 2: Determine Final Moment of Inertia and Angular Momentum
When a particle of mass \(m\) is picked up at the edge (radius \(R\) ), it adds to the system’s moment of inertia. The moment of inertia of a point mass at distance \(R\) is \(m R^2\). The new total moment of inertia ( \({I}_{{f}}\) ) becomes:
\(
I_f=I+m R^2
\)
The final angular momentum ( \(L_f\) ) with the new angular speed ( \(\omega_f\) ) is:
\(
L_f=I_f \omega_f=\left(I+m R^2\right) \omega_f
\)
Step 3: Apply Conservation of Angular Momentum and Solve for the New Angular Speed
Since no external torques act on the system, the total angular momentum is conserved \(\left({L}_{{i}}={L}_{{f}}\right):\)
\(
I \omega_0=\left(I+m R^2\right) \omega_f
\)
Solving for the final angular speed, \(\omega_f\) :
\(
\omega_f=\frac{I \omega_0}{I+m R^2}
\)
Example 26: If the radius of the earth contracts to half of its present value without change in its mass, what will be the new duration of the day?
Solution: Present angular momentum of earth, \(L_1=I \omega=\frac{2}{5} M R^2 \omega\)
New angular momentum due to change in radius,
\(
L_2=\frac{2}{5} M\left(\frac{R}{2}\right)^2 \omega^{\prime}
\)
If external torque is zero, then angular momentum must be conserved, i.e.
\(
\begin{aligned}
L_1 & =L_2 \\
\frac{2}{5} M R^2 \omega & =\frac{1}{4} \times \frac{2}{5} M R^2 \omega^{\prime} \\
\omega^{\prime} & =4 \omega
\end{aligned}
\)
i.e.
\(
\begin{aligned}
T^{\prime} & =\frac{1}{4} T \quad\left(\because \omega=\frac{2 \pi}{T}\right) \\
& =\frac{1}{4} \times 24=6 \mathrm{~h}
\end{aligned}
\)
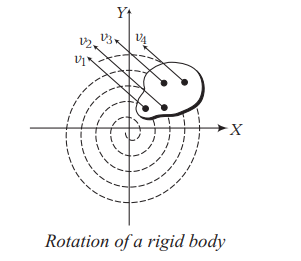
Rotational Kinetic Energy of the Particles (Kinetic Energy of a rigid body rotating about a given axis)
The energy due to rotational motion of a body is known as rotational kinetic energy.
Let us consider a body rotating about a fixed axis. For a rotating rigid body, kinetic energy is the sum of kinetic energies of individual particles.
So, kinetic energy of a rotating body,
\(
\begin{aligned}
K & =\frac{1}{2} m_1 v_1^2+\frac{1}{2} m_2 v_2^2+\ldots+\frac{1}{2} m_n v_n^2 \\
K & =\sum_{i=1}^n \frac{1}{2} m_i v_i^2
\end{aligned}
\)
Substituting \(v=r \omega, K=\sum_{i=1}^n \frac{1}{2} m_i r_i^2 \omega^2\)
where, \(m_i\) is the mass of \(i\) th particle and \(v_i\) is its linear velocity.
As, the angular velocity \(\omega\) is same for all the particles of rigid body.
So, \(K=\frac{1}{2} \omega^2\left(\sum_{i=1}^n m_i r_i^2\right) \dots(i)\)
The quantity \(\sum\left(m_i r_i^2\right)\) depends on distribution of mass around axis of rotation. This quantity is called moment of inertia (\(I\)).
Kinetic energy, \(\quad K=\frac{1}{2} I \omega^2 \dots(ii)\)
When \(\omega=1\), rotational kinetic energy \(=\frac{1}{2} I\)
or Moment of inertia, \(I=2 \times\) Rotational kinetic energy
Hence, the moment of inertia of a rigid body about an axis of rotation is numerically equal to twice the rotational kinetic energy of the body when it is rotating with unit angular velocity about that axis.
Rotational kinetic energy depends upon axis of rotation.
Example 27: A wheel is rotating at a rate of 1000 rpm and its kinetic energy is \(10^6 \mathrm{~J}\). Determine the moment of inertia of the wheel about its axis of rotation.
Solution: Given, \(v=1000 \mathrm{rpm}=\frac{1000}{60} \mathrm{rps}=\frac{50}{3} \mathrm{rps}\)
\(
\omega=2 \pi \nu=\frac{100 \pi}{3} \mathrm{rads}^{-1}
\)
Rotational kinetic energy \(=\frac{1}{2} I \omega^2\)
\(
\begin{aligned}
10^6 & =\frac{1}{2} \times I \times\left(\frac{100 \pi}{3}\right)^2 \\
I & =\frac{2 \times 10^6 \times 9}{(100)^2 \pi^2}=\frac{200 \times 9}{9.87}=182.4 \mathrm{~kg}-\mathrm{m}^2
\end{aligned}
\)
Example 28: A flywheel of mass 0.2 kg and radius 10 cm is rotating with \((5 / \pi)\) rev/s about an axis perpendicular to its plane passing through its centre. Calculate angular momentum and kinetic energy of flywheel.
Solution: Angular velocity, \(\omega=2 \pi \nu=2 \pi \times \frac{5}{\pi}=10 \mathrm{rad} / \mathrm{s}\) and moment of inertia, \(I=m r^2=(0.2)(0.1)^2=2 \times 10^{-3} \mathrm{~kg}-\mathrm{m}^2\)
\(
\begin{aligned}
\text { Angular momentum } & =I \omega=2 \times 10^{-3} \times 10=2 \times 10^{-2} \mathrm{~J}-\mathrm{s} \\
& =2 \times 10^{-2} \mathrm{~kg}-\mathrm{m}^2 \mathrm{~s}^{-1}
\end{aligned}
\)
Kinetic energy \(=\frac{1}{2} I \omega^2=\frac{1}{2} \times 2 \times 10^{-3} \times(10)^2=0.1 \mathrm{~J}\)
Work-energy theorem in rotational motion
According to work-energy theorem, the change in the rotational kinetic energy of a rigid body is equal to the work done by external torques acting on the body.
Work done by torque \(=\) Change in rotational kinetic energy
\(
W=\frac{1}{2} I \omega_2^2-\frac{1}{2} I \omega_1^2
\)
Example 29: An energy of \(484 J\) is spent in increasing the speed of a flywheel from 60 rpm to 360 rpm. Calculate moment of inertia of flywheel.
Solution: Given, energy spent, \(W=484 \mathrm{~J}\)
Initial speed, \(\omega_1=60 \mathrm{rpm}=\frac{60}{60} \times 2 \pi=2 \pi \mathrm{rad} \mathrm{s}^{-1}\)
Final speed, \(\omega_2=360 \mathrm{rpm}=\frac{360}{60} \times 2 \pi=12 \pi \mathrm{rad} \mathrm{s}^{-1}\)
Moment of inertia, \(I=\) ?
Energy spent, \(W=E_2-E_1=\frac{1}{2} I \omega_2^2-\frac{1}{2} I \omega_1^2\)
\(
\begin{aligned}
& =\frac{1}{2} I\left[(12 \pi)^2-(2 \pi)^2\right]=70 I \pi^2 \\
\Rightarrow & I=\frac{484}{70 \times \pi^2}=0.7 \mathrm{~kg}-\mathrm{m}^2
\end{aligned}
\)
Example 30: If the rotational kinetic energy of a body is increased by \(300 \%\), then determine percentage increase in its angular momentum.
Solution: Percentage increase in angular momentum,
\(
=\frac{L_2-L_1}{L_1} \times 100
\)
As, \(\quad L \propto \sqrt{E}\) and \(E_1=E\)
\(
\begin{array}{ll}
\Rightarrow & E_2=E+\frac{300}{100} E \\
\Rightarrow & E_2=4 E
\end{array}
\)
\(
\begin{aligned}
\text { Increase in momentum }= & \frac{\sqrt{E_2}-\sqrt{E_1}}{\sqrt{E_1}} \times 100 \\
= & \frac{\sqrt{4 E}-\sqrt{E}}{\sqrt{E}} \times 100=100 \%
\end{aligned}
\)
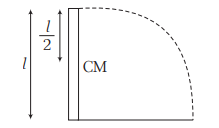
Example 41: A thin metre scale is kept vertical by placing its one end on floor. Keeping the end in contact stationary, it is allowed to fall. Calculate the velocity of its upper end when it hits the floor.
Solution: Loss in potential energy \(=\) Gain in rotational kinetic energy
Step 1: Equating Potential and Kinetic Energy
The equation starts by equating the initial gravitational potential energy (PE) of the rod’s center of mass (at height \(I / 2\) ) to its final rotational kinetic energy (KE) when it reaches the horizontal position (where the center of mass is at height 0 ).
\(
\frac{m g l}{2}=\frac{1}{2} I \omega^2
\)
Step 2: Substituting Moment of Inertia
The moment of inertia (\(I\)) for a uniform thin rod pivoted at one end is \(\frac{m l^2}{3}\). This value is substituted into the energy equation, along with the relationship between linear velocity \((v)\) and angular velocity \((\omega), v=\omega l\), which implies \(\omega^2=\frac{v^2}{l^2}\).
\(
\frac{m g l}{2}=\frac{1}{2}\left(\frac{m l^2}{3}\right) \omega^2=\frac{1}{2}\left(\frac{m l^2}{3}\right) \times\left(\frac{v^2}{l^2}\right)
\)
Step 3: Solving for Velocity
The equation is simplified to solve for the final velocity ( \(v\) ) of the free end of the rod.
\(
\frac{m g l}{2}=\frac{m v^2}{6}
\)
Multiplying both sides by 6 and dividing by \(m\) gives:
\(
3 g l=v^2
\)
Taking the square root of both sides yields the final expression for velocity:
\(
v=\sqrt{3 g l}
\)