6.14 Rolling motion
Rolling movement is a combination of rotational motion (spinning on an axis) and translational motion (moving forward/backward), seen in objects like wheels or balls (motion of football rolling on a surface. In rolling motion, the velocity of centre of mass (COM) represents linear motion while angular velocity represents rotational motion.
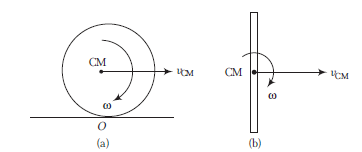
The kinetic energy of a rolling body is equal to the sum of kinetic energies of translational and rotational motion.
∴ Total kinetic energy of a rolling body \(=\) Rotational kinetic energy + Translational kinetic energy
\(
=\frac{1}{2} I \omega^2+\frac{1}{2} m v_{\mathrm{CM}}^2
\)
Example 1: A disc of mass 5 kg and radius 50 cm rolls on the ground at the rate of \(10 \mathrm{~ms}^{-1}\). Determine the kinetic energy of the disc.
Solution: Given, mass of the disc, \(M=5 \mathrm{~kg}\)
Radius of the disc, \(R=50 \mathrm{~cm}=\frac{1}{2} \mathrm{~m}\)
Linear velocity of the disc, \(v=10 \mathrm{~ms}^{-1}\)
\(
\begin{aligned}
& \because \\
& \Rightarrow \\
& \Rightarrow
\end{aligned} \quad \begin{aligned}
v & =R \omega \\
10 & =\frac{1}{2} \omega \\
& \omega=10 \times 2=20 \mathrm{rad} \mathrm{~s}^{-1}
\end{aligned}
\)
Also, moment of inertia of disc about an axis through its centre,
\(
\begin{aligned}
I & =\frac{1}{2} M R^2 \\
\Rightarrow \quad I & =\frac{1}{2} \times 5 \times\left(\frac{1}{2}\right)^2=\frac{5}{8} \mathrm{~kg}-\mathrm{m}^2
\end{aligned}
\)
Translational kinetic energy \(=\frac{1}{2} M v^2=\frac{1}{2} \times 5 \times(10)^2=250 \mathrm{~J}\)
Rotational kinetic energy \(=\frac{1}{2} I \omega{ }^2\)
\(
=\frac{1}{2} \times \frac{5}{8} \times(20)^2=125 \mathrm{~J}
\)
∴ Total kinetic energy \(=(250+125) \mathrm{J}=375 \mathrm{~J}\)
Classification of rolling motion
Depending on the fact that relative velocity of point of contact of the body undergoing rolling motion, with the platform is zero or non-zero. Rolling motion is classified into two categories, which are as follows:
- Pure rolling or rolling without slipping/sliding or perfect rolling motion.
- Impure rolling or rolling with slipping/sliding or imperfect rolling motion.
Pure rolling
Pure rolling or rolling without slipping/sliding or perfect rolling motion: This occurs when the relative velocity of the point of contact is zero.
In pure rotational motion, the axis of rotation is fixed, and the center of mass (if on the axis) has zero velocity. The motion you are describing, where the center of mass moves and the contact point has an interesting motion, is rolling motion (specifically, rolling without slipping), which is a combination of two simultaneous motions.
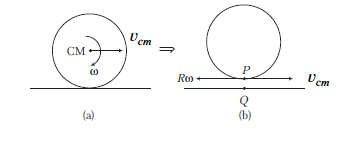
Translational Motion: The entire disc, including point \(\boldsymbol{P}\), moves forward with the same linear velocity as the center of mass (CM), let’s call it \(\boldsymbol{v}_{\boldsymbol{c m}}\). This velocity vector for point \(\boldsymbol{P}\) points horizontally forward with magnitude \(v_{c m}\).
Rotational Motion: Point \(\boldsymbol{P}\) simultaneously rotates around the center of mass with a tangential velocity \(\left(v_{\text {rot }}\right)\). This velocity vector for point \(\boldsymbol{P}\) points horizontally backward (opposite to the direction of motion) with magnitude \(v_{\text {rot }}=R \omega\).
Combined Motion at the Contact Point:
For the special case of rolling without slipping, the linear speed of the center of mass is exactly equal to the tangential speed of a point on the edge: \(v_{c m}=R \omega\).
The net velocity of point \(\boldsymbol{P}\) is the vector sum of these two motions:
(i) Translational velocity component: \(v_{c m}\) (forward)
(ii) Rotational velocity component: R \(\omega\) (backward) (due to rotation of the disc as a whole in clockwise direction. In case of pure rolling, these two velocities become equal)
Since \(v_{c m}=R \omega {\text {, the two velocity components cancel each other out: }}\)
\(
v_P=v_{c m}-R \omega=R \omega-R \omega=0
\)
The net velocity of the contact point \(\boldsymbol{P}\) is momentarily zero at any instant. This point acts as the instantaneous axis of rotation for the entire disc at that moment.
Suppose the base over which the disc in rolling is also moving with some velocity (say \(v_0\) ), then in that case condition of pure rolling is different.
e.g. In the above figure, \(v_P=v_Q\) or \(v_{cm}-R \omega=v_0\)
Thus, in this case \(v_{cm}-R \omega \neq 0\), but \(v_{cm}-R \omega=v_0\). In uniform pure rolling, \(v_{cm}\) and \(\omega\) are constants, i.e. they are neither increasing nor decreasing.
Impure rolling
A disc slips when its translational velocity \((v_{cm})\) is greater than its rotational velocity at the circumference \((\omega R)\) because the point of contact has a net forward velocity relative to the surface.
Slipping condition \((v_{cm}>\omega R)\) :
- If \(v_{cm}>\omega R\), the net velocity of the contact point \(\left(v_p=v_{cm}-\omega R\right)\) is positive (forward) relative to the ground.
- This means the disc’s contact point is moving faster forward than the surface it is in contact with (or sliding forward along the surface).
- This relative motion is defined as forward slipping (or skidding).
Due to this relative motion, a kinetic friction force will act on the disc, opposing the direction of the slip (i.e., backwards). This friction force will then work to decrease the translational speed ( \(v_{cm}\) ) and increase the angular speed ( \(\omega\) ) until the pure rolling condition \((v=\omega R)\) is eventually achieved.
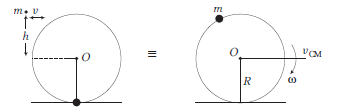
Example 2: A hollow sphere of mass \(M\) lies on a rough horizontal plane when a particle of mass \(m\) travelling with speed \(v\) collides and sticks with it. If line of motion of the particle is at height \(h\) above the centre of sphere, find \(h\) if the body rolls without slipping after collision.
Solution: Mass \(m\) moving with velocity \(v\) creating rotation in sphere.
Key idea
For the body to roll without slipping immediately after collision, the friction impulse must be zero.
Hence:
1. Linear momentum is conserved
2. Angular momentum about the centre is conserved
3. Rolling condition: \(v_{cm}=\omega R\)
For a hollow (thin) sphere, the moment of inertia about its centre is
\(
I_{\text {sphere }}=\frac{2}{3} M R^2
\)
The particle of mass \(m\) hits the sphere horizontally at a height \(h\) above the centre and sticks to it.
Linear momentum conservation:
\(
m v=(M+m) v_{cm} \Rightarrow v_{cm}=\frac{m v}{M+m}
\)
Angular momentum about the centre
Initial angular momentum (particle about sphere centre):
\(
L_i=m v h
\)
Final angular momentum:
\(
L_f=I \omega
\)
\(
I=\frac{2}{3} M R^2+m R^2=R^2\left(\frac{2}{3} M+m\right)
\)
\(
\omega=\frac{m v h}{R^2\left(\frac{2}{3} M+m\right)}
\)
Rolling without slipping condition:
\(
v_{cm}=\omega R
\)
Substitute \(v_{cm}\) and \(\omega\) :
\(
\frac{m v}{M+m}=\frac{m v h}{R\left(\frac{2}{3} M+m\right)}
\)
\(
\frac{1}{M+m}=\frac{h}{R\left(\frac{2}{3} M+m\right)}
\)
\(
h=R \frac{\frac{2}{3} M+m}{M+m}
\)
\(
=\frac{2 R}{3} \quad \text { (Since, } m \ll M \text { ) }
\)
Kinetic energy of rolling motion
The kinetic energy of a rolling body is the sum of kinetic energy of translational motion and kinetic energy of rotational motion.
∴ Kinetic energy of rolling motion,
\(
E=\frac{1}{2} I \omega^2+\frac{1}{2} M v_{\mathrm{CM}}^2
\)
Substituting the value of \(I=M K^2\), where \(K\) is radius of gyration and \(v_{\mathrm{CM}}=R \omega\), we get
\(
\begin{aligned}
E & =\frac{1}{2} M K^2\left(\frac{v_{\mathrm{CM}}}{R}\right)^2+\frac{1}{2} M v_{\mathrm{CM}}^2 \\
\Rightarrow \quad E & =\frac{1}{2} M v_{\mathrm{CM}}^2\left(1+\frac{K^2}{R^2}\right)
\end{aligned}
\)
The ratio of translational energy, rotational energy and total energy can be calculated as
\(
E_{\text {translational }}=\frac{1}{2} M v_{cm}^2
\)
\(
E_{\text {rotational }}=\frac{1}{2} I \omega^2=\frac{1}{2}\left(M K^2\right)\left(\frac{v_{cm}}{R}\right)^2=\frac{1}{2} M K^2 \frac{v_{cm}^2}{R^2}=\frac{1}{2} M v_{cm}^2 \frac{K^2}{R^2}
\)
\(
E_{\text {rotational }}=E_{\text {translational }} \times \frac{K^2}{R^2}
\)
The total energy becomes:
\(
E_{\text {total }}=E_{\text {translational }}+E_{\text {rotational }}=E_{\text {translational }}\left(1+\frac{K^2}{R^2}\right)
\)
Forming the ratio:
\(
\begin{aligned}
E_{\text {translational }} & : E_{\text {rotational }}: E_{\text {total }} \\
1 & : \frac{K^2}{R^2}: 1+\frac{K^2}{R^2}
\end{aligned}
\)
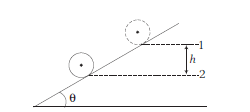
Example 3: A solid cylinder of mass \(m\) and radius \(r\) starts rolling down an inclined plane of inclination \(\theta\). Friction is enough to prevent slipping. Find the speed of its centre of mass when its centre of mass has fallen a height \(h\).
Solution: Considering the two shown positions of the cylinder. As it does not slip, hence total mechanical energy will be conserved.
Step 1: Apply the principle of conservation of energy
The initial potential energy of the cylinder is converted into both translational and rotational kinetic energy as it rolls down the incline. The work done by static friction is zero, so mechanical energy is conserved. The total initial energy (potential) equals the total final energy (translational kinetic plus rotational kinetic).
Energy at position 1, \(E_{initial}=m g h\)
Energy at position 2, \(E_{final}=\frac{1}{2} m v_{\mathrm{CM}}^2+\frac{1}{2} I_{\mathrm{CM}} \omega^2\)
\(
\begin{gathered}
E_{\text {initial }}=E_{\text {final }} \\
m g h=\frac{1}{2} m v_{cm}^2+\frac{1}{2} I_{cm} \omega^2
\end{gathered}
\)
Step 2: Substitute the moment of inertia and angular velocity
For a solid cylinder rolling about its center of mass axis, the moment of inertia is \(I_{cm}=\frac{1}{2} m r^2\). For an object rolling without slipping, the linear velocity \(v_{cm}\) of the center of mass and angular velocity \(\omega\) are related by \(\omega=v_{cm} / r\).
Substitute these into the energy equation:
\(
\begin{aligned}
m g h & =\frac{3}{4} m v_{\mathrm{CM}}^2 \\
v_{\mathrm{CM}} & =\sqrt{\frac{4}{3} g h}
\end{aligned}
\)
The speed of its centre of mass when its centre of mass has fallen a height \(h\) is \(\sqrt{\frac{4 g h}{3}}\).
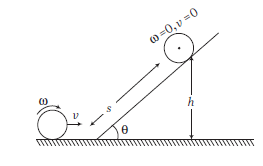
Example 4: \(A\) disc of radius \(R\) starts at time \(t=0[latex] moving along the positive [latex]X\)-axis with linear speed \(v\) and angular speed \(\omega\). Find the \(x[latex] and [latex]y\)-coordinates of the bottom most point at any time \(t\).
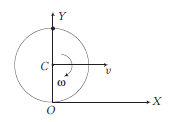
Solution: Take the origin at the initial position of the centre of the disc, with the \(X\)-axis horizontal and \(Y\)-axis upward.
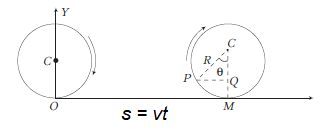
At time \(t\), the bottom most point will rotate at an angle \(\theta=\omega t\) with respect to the centre of the disc \(C\). The centre \(C\) will travel a distance, \(s=v t\) in the +ve \(x\) direction.
\(x_C(t)=v t, \quad y_C(t)=R\)
Rotation of the disc:
Let the disc rotate with angular speed \(\omega\).
At \(t=0\), the bottommost point is vertically below the centre.
After time \(t\), the disc has rotated through angle
\(
\theta=\omega t
\)
(positive \(\omega\) taken as counterclockwise).
Position of the bottommost point relative to the centre:
At time \(t\), the point that was initially at the bottom has coordinates (relative to the centre):
In the figure,
\(
\begin{aligned}
& P Q=R \sin \theta=R \sin \omega t \\
& C Q=R \cos \theta=R \cos \omega t
\end{aligned}
\)
Coordinates of point \(P\) at time \(t\) are
\(
x=O M-P Q=v t-R \sin \omega t
\)
and
\(
y=C M-C Q=R-R \cos \omega t
\)
\(
(x, y) \equiv(v t-R \sin \omega t, R-R \cos \omega t)
\)
Example 5: A horizontal force \(F\) acts on the solid sphere at its centre as shown in figure. Coefficient of friction between ground and sphere is \(\mu\). What is the maximum value of \(F\) for which there is no slipping?
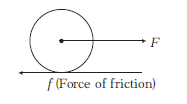
Solution: Translational Motion (Newton’s Second Law): The net horizontal force causes linear acceleration \(a\).
\(
F-f=M a
\)
Rotational Motion (Torque Equation): The friction force \(f\) produces a torque \(\tau\) about the center of mass, causing angular acceleration \(\alpha\)
\(
\tau=f R=I \alpha
\)
No Slipping Condition & Moment of Inertia: Substituting the no-slipping condition \((\alpha=a / R)\) and the moment of inertia for a solid sphere \(\left(I=\frac{2}{5} M R^2\right)\) into the torque equation:
\(
\begin{aligned}
& f \cdot R=\frac{2}{5} M R^2 \frac{a}{R} \\
& f=\frac{2}{5} M a
\end{aligned}
\)
Solving for \(\boldsymbol{f}\) in terms of \(\boldsymbol{F}\) : Rearranging the translational motion equation to express \(M a\) in terms of \(f\), and substituting the result:
\(
\begin{aligned}
& M a=F-f \\
& f=\frac{2}{5}(F-f) \\
& 5 f=2 F-2 f \\
& 7 f=2 F \\
& f=\frac{2}{7} F
\end{aligned}
\)
No Slipping Condition: The condition for no slipping requires the friction force \(f\) to be less than or equal to the maximum static friction, \(\mu_s N\), where \(N\) is the normal force. On a horizontal surface, \(N=M g\).
For no slipping, \(f \leq \mu_s M g\)
\(
\begin{aligned}
& \frac{2}{7} F \leq \mu_s M g \\
& \Rightarrow F \leq \frac{7}{2} \mu_s M g
\end{aligned}
\)
This final inequality gives the maximum applied force \(\boldsymbol{F}\) for which the solid sphere will roll without slipping.
Note: \(v_{c m}=R \omega\)
Differentiating this equation, we get
\(a=\frac{d v_{cm}}{d t}=R\frac{d \omega}{d t}=R\alphalatex]
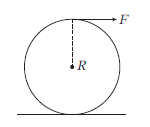
Example 6: A tangential force [latex]F\) acts at the top of a thin spherical shell of mass \(m\) and radius \(R\). Find the acceleration of the shell, if it rolls without slipping.
Solution: For a thin spherical shell,
\(
I_{\mathrm{CM}}=\frac{2}{3} m R^2
\)
A tangential force \(F\) is applied at the top of the shell. The shell rolls without slipping.
Use torque about the point of contact (cleanest method)
When rolling without slipping, the point of contact (P) with the ground is the instantaneous axis of rotation.
Moment of inertia about the contact point
\(
I_P=I_{\mathrm{CM}}+m R^2=\frac{2}{3} m R^2+m R^2=\frac{5}{3} m R^2
\)
Torque about the contact point
The force \(F\) acts at the top, which is at a distance \(2 R\) from the contact point.
\(
\tau=F(2 R)
\)
Angular acceleration
\(
\alpha=\frac{\tau}{I_P}=\frac{2 F R}{\frac{5}{3} m R^2}=\frac{6 F}{5 m R}
\)
For rolling without slipping,
\(
\begin{aligned}
a & =\alpha R \\
a & =\frac{6 F}{5 m}
\end{aligned}
\)
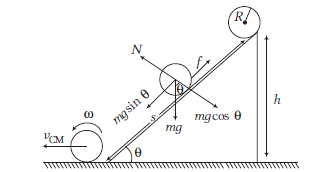
Rolling down on a rough inclined plane
A body of mass \(m\) and radius \(R\) rolling down a plane inclined at an angle \(\theta\) with the horizontal. If the body rolls without slipping, then the centre of mass of the body moves in a straight line.
Different forces acting on the body are
(i) Frictional force ( \(f\) ) acting upwards at the point of contact with inclined plane and parallel to the inclined plane.
(ii) Normal reaction of inclined plane ( \(N\) ).
(iii) Weight of the body \((\mathrm{mg})\) acting vertically downwards through the centre of mass of body.
For rolling without slipping, the friction force is static ar no work is done by frictional force.
So, from law of conservation of mechanical energy,
\(
m g h=\frac{1}{2} m v_{\mathrm{CM}}^2+\frac{1}{2} I \omega^2
\)
Putting \(I=m K^2\), where \(K=\) radius of gyration and \(v_{\mathrm{CM}}=R \omega\), we get
\(
v_{\text {rolling }}=\sqrt{\frac{2 g h}{1+K^2 / R^2}}
\)
From Figure above, \(h=s \sin \theta\)
\(
\therefore \quad v_{\text {rolling }}=\sqrt{\frac{2 g s \sin \theta}{1+K^2 / R^2}}
\)
\(
=\sqrt{\frac{2 g s \sin \theta}{1+n^2}} \quad(\text { where }, K=n R)
\)
If body slides, then \(\frac{K^2}{R^2}=0\)
\(
\Rightarrow \quad v_{\text {sliding }}=\sqrt{2 g h}=\sqrt{2 g s \sin \theta}
\)
From the above formula, we see that velocity of rolling motion is independent of its mass ( \(M\) ) and radius ( \(R\) ). It means all uniform solid spheres or any other similar
object will reach the bottom with same speed because the ratio \(K^2 / R^2\) will be same for similar bodies.
Acceleration, \(a_{\text {rolling }}=\frac{g \sin \theta}{1+\left(K^2 / R^2\right)}=\frac{g \sin \theta}{1+n^2}\)
It is also independent of mass and radius.
If body slides, then \(\frac{K^2}{R^2}=0 \quad\) (For frictionless surface)
\(
\therefore \quad a_{\text {sliding }}=g \sin \theta
\)
Time taken by rolling body to reach the bottom,
\(
t=\frac{1}{\sin \theta} \sqrt{\frac{2 h}{g}\left(1+\frac{K^2}{R^2}\right)}
\)
A body with smaller value of \(K^2 / R^2\) will take less time to reach the bottom.
Change in kinetic energy due to rolling \(\left(v_2>v_1\right)\)
\(
=\frac{1}{2} m\left(1+\frac{K^2}{R^2}\right)\left(v_2^2-v_1^2\right)
\)
Remark
- For pure rolling motion, there should be friction on surface because it provides torque to the body. On smooth surface, rolling is not possible.
- Velocity of falling and sliding bodies from inclined plane are equal and is more than that of rolling body.
- For rolling along inclined plane, acceleration is maximum in case of falling and minimum in case of rolling. Falling body reaches the bottom first and rolling body in the last.
- When ring ( \(R\) ), disc ( \(D\) ), hollow sphere ( \(H\) ) and solid sphere ( \(S\) ) rolls on same inclined plane, then
\(
v_S>v_D>v_H>v_R \Rightarrow a_S>a_D>a_H>a_R \Rightarrow t_S<t_D<t_H<t_R
\)
Example 7: A sphere of mass \(m\) attached to a spring on inclined plane as shown in figure is held in unstretched position of spring. Suddenly sphere is left free, what is the maximum extension of spring, if friction allows only rolling of sphere about horizontal diameter?
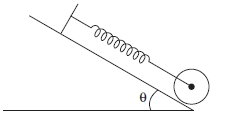
Solution: At the point of maximum extension, sphere is at rest. No work is done by frictional force in rolling.
⇒ Loss in gravitational potential energy \(=\) Gain in potential energy of spring
\(
\begin{array}{lr}
\Rightarrow & \frac{1}{2} k x^2=m g x \sin \theta \\
\Rightarrow & x=\frac{2 m g \sin \theta}{k}
\end{array}
\)
Example 8: Calculate the kinetic energy of rolling ring of mass 0.2 kg about an axis passing through its centre of mass and perpendicular to it, if its centre of mass is moving with a velocity of \(3 \mathrm{~m} / \mathrm{s}\).
Solution: Kinetic energy, \(\mathrm{KE}=\frac{1}{2} m v_{\mathrm{CM}}^2\left(1+\frac{K^2}{R^2}\right)\)
Here, for ring \(\frac{K^2}{R^2}=1\),
\(
\begin{aligned}
& m=0.2 \mathrm{~kg} \text { and } v_{\mathrm{CM}}=3 \mathrm{~m} / \mathrm{s} \\
\therefore \quad & \mathrm{KE}=\frac{1}{2} \times 0.2 \times 9(1+1)=0.2 \times 9=1.8 \mathrm{~kg}-\mathrm{m}^2 \mathrm{~s}^{-2}
\end{aligned}
\)
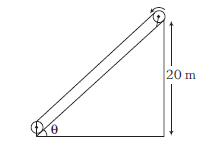
Example 9: A solid sphere is rolling down an inclined plane without slipping of height 20 m . Calculate the maximum velocity with which it will reach the bottom of the plane. (Take, \(g=10 \mathrm{~m} / \mathrm{s}^2\) )
Solution: When the sphere rolls down, its potential energy changes to kinetic energy of rotation. Therefore, kinetic energy = potential energy.
\(
\begin{aligned}
& \quad \frac{1}{2} m v^2\left(1+\frac{K^2}{R^2}\right)=m g h \Rightarrow v=\sqrt{\frac{2 g h}{\left(1+K^2 / R^2\right)}} \\
& \text { Moment of inertia of solid sphere }=\frac{2}{5} M R^2 \\
& \therefore \quad K^2=\frac{2}{5} R^2 \\
& \text { Hence, } v=\sqrt{\frac{2 g h}{\left(1+\frac{2}{5}\right)}}=\sqrt{\frac{2 g h \times 5}{7}}=\sqrt{\frac{2 \times 10 \times 20 \times 5}{7}} \\
& =\sqrt{285.714}=16.9 \mathrm{~m} / \mathrm{s}
\end{aligned}
\)
Example 10: A solid sphere is rolling without slipping on a level surface at a constant speed of \(2 \mathrm{~ms}^{-1}\). How far can it roll up on a ramp inclined at \(30^{\circ}\) before it stops?
Solution: The moment of inertia of the sphere about its axis of rotation is \(I=\frac{2}{5} m r^2\). Suppose it rises to height \(h\) before stopping. Using the conservation of energy, we get
\begin{aligned}
&\begin{aligned}
m g h & =\frac{1}{2} m v^2+\frac{1}{2} I \omega^2=\frac{1}{2} m v^2+\frac{1}{2}\left(\frac{2}{5} m r^2\right) \omega^2 \\
& =\frac{1}{2} m v^2+\frac{1}{5} m v^2=\frac{7}{10} m v^2 \text { or } h=\frac{7 v^2}{10 g}
\end{aligned}\\
&\text { ∴ The distance rolled up on the ramp, }\\
&s=\frac{h}{\sin \theta}=\frac{7 v^2}{10 g \sin 30^{\circ}}=\frac{7\left(2 \mathrm{~ms}^{-1}\right)^2}{10\left(9.8 \mathrm{~ms}^{-2}\right) \times 1 / 2}=\frac{4}{7} \mathrm{~m} \simeq 57 \mathrm{~cm}
\end{aligned}
\)
Example 11: When a body is under pure rolling, the fraction of its total kinetic energy which is the purely rotational is 2/5. Identify the body.
Solution: In these type of questions, calculate the expression for moment of inertia \(I\) and that helps in identifying the body.
\(
\begin{aligned}
& \text { Rotational kinetic energy }=\frac{1}{2} I \omega^2 \\
& \text { Translational kinetic energy }=\frac{1}{2} M v^2 \\
& \therefore \quad \text { Total kinetic energy }=\frac{1}{2} I \omega^2+\frac{1}{2} M v^2 \\
& \text { Given, } \frac{2}{5}=\frac{\text { Rotational kinetic energy }}{\text { Total kinetic energy }} \\
& \text { or } \quad \frac{2}{5}=\frac{(1 / 2) I \omega^2}{(1 / 2) I \omega^2+(1 / 2) M v^2}
\end{aligned}
\)
So, the rolling body is hollow sphere.
Example 12: A uniform sphere of mass \(m\) and radius \(R\) rolls without slipping down an inclined plane set at an angle \(\theta\) to the horizontal.
Find
(i) the friction coefficient when slipping is absent and
(ii) the kinetic energy of the sphere \(t\) seconds after the beginning of motion.
Solution: (i) If a body rolls without slipping,
\(
\mu_{\min }=\frac{\tan \theta}{1+\frac{R^2}{K^2}}=\frac{\tan \theta}{1+\frac{5}{2}}=\frac{2}{7} \tan \theta \quad\left(\text { For sphere }, \frac{K^2}{R^2}=\frac{2}{5}\right)
\)
(ii) For pure rolling, \(a=\frac{g \sin \theta}{1+\frac{K^2}{R^2}}=\frac{g \sin \theta}{1+\frac{2}{5}}=\frac{5}{7} g \sin \theta\) Linear velocity after time \(t, v=u+a t=0+\frac{5 g \sin \theta}{7} t\) In pure rolling, kinetic energy is given by
\(
\begin{aligned}
K & =\frac{1}{2} m v^2\left(1+\frac{K^2}{R^2}\right)=\frac{1}{2} m v^2\left(1+\frac{2}{5}\right) \\
& =\frac{7}{10} m v^2=\frac{7}{10} m\left(\frac{5 g \sin \theta t}{7}\right)^2=\frac{5}{14} m g^2 \sin ^2 \theta t^2
\end{aligned}
\)