6.11 Kinematics of rotational motion about a fixed axis
Rigid Body Rotation
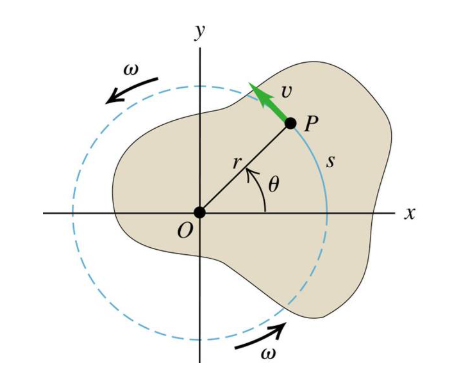
Lets consider pure rotational motion (rotation of a rigid object about a fixed axis). Since the object is rigid, this means that we can associate the angle \(\theta\) with the entire rigid object as well as with an individual particle. When rotating about a fixed axis, every point on a rigid body has the same angular speed and the same angular acceleration. Choosing the axis of rotation to be \(z\)-axis, we can start to analyse rigid body rotation.
Average angular velocity:
\(
\bar{\omega}=\frac{\theta_2-\theta_1}{t_2-t_1}=\frac{\Delta \theta}{\Delta t}
\)
,where \(\Delta \theta\) is the angular displacement of the rigid object.
Instantaneous angular velocity:
\(
\omega=\lim _{\Delta \rightarrow 0} \frac{\Delta \theta}{\Delta t}=\frac{d \theta}{d t}
\)
Average angular acceleration:
\(
\bar{\alpha}=\frac{\omega_2-\omega_1}{t_2-t_1}=\frac{\Delta \omega}{\Delta t}
\)
Instantaneous angular acceleration:
\(
\alpha=\lim _{\Delta t \rightarrow 0} \frac{\Delta \omega}{\Delta t}=\frac{d \omega}{d t}
\)
When a rigid body rotates about a fixed axis, every particle in the body moves with the same angular speed \(\omega\).
Since \(s=r \theta\), we have:
\(
\begin{aligned}
v & =\frac{d s}{d t} \\
& =r \frac{d \theta}{d t} \\
& =r \omega
\end{aligned}
\)
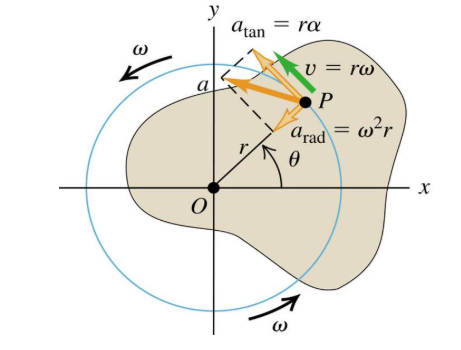
Using \(v=r \omega\), we have:
\(
\begin{aligned}
a_t & =\frac{d v}{d t} \\
& =r \frac{d \omega}{d t} \\
& =r \alpha
\end{aligned}
\)
Where \(a_t\) is the tangential acceleration of the rigid body.
You will be familiar with the radial acceleration from circular motion:
\(
a_r=\frac{v^2}{r}=r \omega^2
\)
Connecting Rotational & Linear Motion (for a point at radius \({r}\) )
Arc Length ( \(s\) ): \(s=r \theta\)
Tangential Velocity \(\left(v_t\right): v_t=r \omega\) (linear speed along the circle).
Tangential Acceleration \(\left(a_t\right)\) : \(a_t=r \alpha\) (change in linear speed).
Radial/Centripetal Acceleration \(\left(a_r\right): a_r=r \omega^2\) (towards the center).
Total Acceleration \((a): a=\sqrt{a_t^2+a_r^2}\).
Rotational motion occurs when a rigid body turns about a fixed axis, with all its points moving in circles centered on that axis. In contrast, circular motion involves a single particle or point object tracing a circular path, not necessarily centered on an axis of rotation.
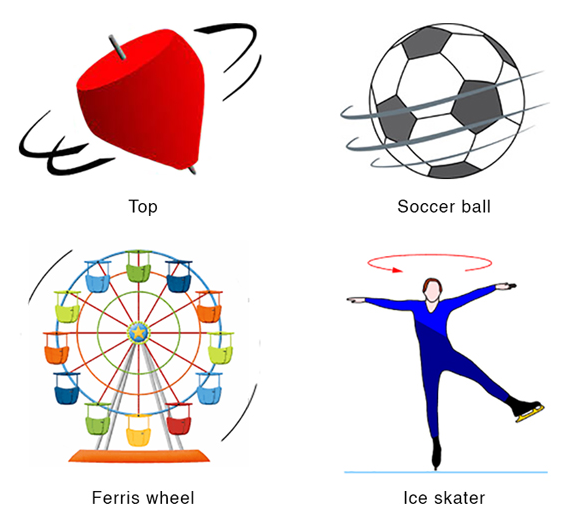
Rotational Motion
Rotational motion is an object spinning around an internal axis (like a spinning top). The key is the axis: in pure rotation (spinning), the axis goes through the object (Earth’s spin); in circular motion (orbiting), the axis is external (Earth orbiting the Sun).
Examples of Rotational Motion
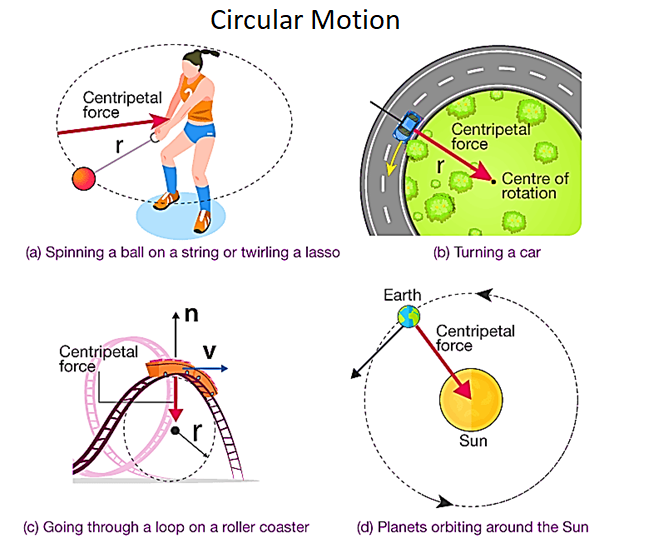
Circular Motion
Circular motion is an object moving along a circular path (like a car on a roundabout), but circular motion is actually a type of rotational motion where the axis is outside the body, and every point on a rotating body moves in a circle. The key is the axis: in pure rotation (spinning), the axis goes through the object; in circular motion (orbiting), the axis is external (Earth orbiting the Sun).
Examples of Circular motion:
Kinematics of Rotational Motion about a fixed axis
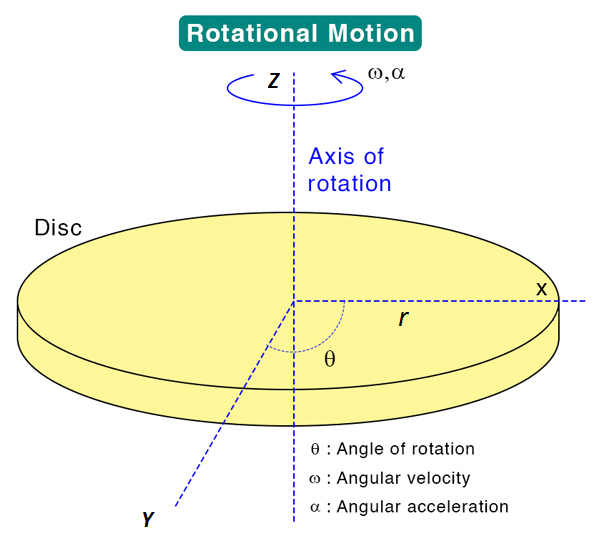
Rotational kinematics about a fixed axis describes how rigid bodies spin using angular variables-angular displacement (\(\theta\)), angular velocity ( \(\omega\) ), and angular acceleration \((\alpha)\)-which mirror linear motion (position, velocity, acceleration). In that respect, we see that the rotation of a body about a fixed axis is analogous to the linear motion of a body in translational motion. In this section, we will discuss the kinematics of a body undergoing rotational motion about a fixed axis.
We also recall that the angular velocity is the time rate of change of angular displacement, \(\omega=\mathrm{d} \theta / \mathrm{d} t\). Note since the axis of rotation is fixed, there is no need to treat angular velocity as a vector. Further, the angular acceleration, \(\boldsymbol{\alpha}=\mathrm{d} \omega / \mathrm{d} t\).
The kinematical quantities in rotational motion, angular displacement ( \(\theta\) ), angular velocity ( \(\omega\) ) and angular acceleration ( \(\alpha\) ) respectively correspond to kinematic quantities in linear motion, displacement ( \(x\) ), velocity ( \(v\) ) and acceleration (\(a\)). We know the kinematical equations of linear motion with uniform (i.e. constant) acceleration:
\(
\begin{aligned}
& v=v_0+a t \\
& x=x_0+v_0 t+\frac{1}{2} a t^2 \\
& v^2=v_0^2+2 a x
\end{aligned}
\)
where \(x_0=\) initial displacement and \(v_0=\) initial velocity. The word ‘initial’ refers to values of the quantities at \(t=0\)
The corresponding kinematic equations for rotational motion with uniform angular acceleration are:
\(
\begin{aligned}
& \omega=\omega_0+\alpha t \\
& \theta=\theta_0+\omega_0 t+\frac{1}{2} \alpha t^2 \\
& \text { and } \omega^2=\omega_0^2+2 \alpha\left(\theta-\theta_0\right)
\end{aligned}
\)
where \(\theta_0=\) initial angular displacement of the rotating body, and \(\omega_0=\) initial angular velocity of the body.
Example 1: Derive the equation \(\omega=\omega_0+\alpha t\)
Solution: The angular acceleration is uniform. hence
\(
\frac{\mathrm{d} \omega}{\mathrm{~d} t}=\alpha=\text { constant } \dots(i)
\)
Integrating this equation,
\(
\begin{aligned}
\omega & =\int \alpha \mathrm{d} t+c \\
& =\alpha t+c \quad \text { (as } \alpha \text { is constant) }
\end{aligned}
\)
At \(t=0, \quad \omega=\omega_0\) (given)
From (i) we get at \(t=0, \omega=c=\omega_0\)
Thus, \(\omega=\alpha t+\omega\) as required.
Example 2: Derive \(\theta=\theta_0+\omega_0 t+\frac{1}{2} \alpha t^2\)
Solution: Step 1: Define angular acceleration and integrate for angular velocity
Angular acceleration is defined as \(\alpha=\frac{d \omega}{d t}\). Assuming constant angular acceleration, we integrate this expression with respect to time to obtain the angular velocity \(\omega(t)\) :
\(
\int d \omega=\int \alpha d t
\)
This yields \(\omega(t)=\alpha t+C_1\). At \(t=0, \omega(0)=\omega_0\), so the constant \(C_1=\omega_0\). The resulting equation for angular velocity is \(\omega=\omega_0+\alpha t\).
Step 2: Define angular velocity and integrate for angular position:
Angular velocity is defined as \(\omega=\frac{d \theta}{d t}\). Substituting the result from Step 1 into this definition gives:
\(
\frac{d \theta}{d t}=\omega_0+\alpha t
\)
We integrate this expression with respect to time to obtain the angular position \(\theta(t)\)
\(
\int d \theta=\int\left(\omega_0+\alpha t\right) d t
\)
This yields \(\theta(t)=\omega_0 t+\frac{1}{2} a t^2+C_2\). At \(t=0, \theta(0)=\theta_0\), so the constant \(C_2=\theta_0\).
The final derived equation for angular position with constant angular acceleration is \(\theta=\theta_0+\omega_0 t+\frac{1}{2} \alpha t^2\).
Example 3: Prove that \(\omega^2=\omega_0^2+2 \alpha\left(\theta-\theta_0\right)\)
Solution: Step 1: Definitions and the Chain Rule
We start with the fundamental definitions of angular velocity ( \(\omega\) ) and angular acceleration ( \(\alpha\) ):
\(
\begin{aligned}
& \omega=\frac{d \theta}{d t} \\
& \alpha=\frac{d \omega}{d t}
\end{aligned}
\)
Using the chain rule, we express \(\alpha\) in terms of \(\omega\) and \(\theta\) :
\(
\alpha=\frac{d \omega}{d t}=\frac{d \omega}{d \theta} \frac{d \theta}{d t}=\omega \frac{d \omega}{d \theta}
\)
Step 2: Integrate both sides of the equation from the initial conditions \(\left(\theta_0, \omega_0\right)\) to the final conditions \((\theta, \omega)\), assuming \(\alpha\) is constant:
\(
\int_{\theta_0}^\theta \alpha d \theta=\int_{\omega_0}^\omega \omega d \omega
\)
This yields:
\(
\alpha\left(\theta-\theta_0\right)=\frac{1}{2} \omega^2-\frac{1}{2} \omega_0^2
\)
Rearrange the expression from Step 1 to separate the variables \(\omega\) and \(\theta\) :
\(
\alpha d \theta=\omega d \omega
\)
\(
\begin{aligned}
&\text { Multiply the entire equation by } 2 \text { and rearrange the terms: }\\
&\begin{aligned}
& 2 \alpha\left(\theta-\theta_0\right)=\omega^2-\omega_0^2 \\
& \omega^2=\omega_0^2+2 \alpha\left(\theta-\theta_0\right)
\end{aligned}
\end{aligned}
\)
Example 4: The angular speed of a motor wheel is increased from 1200 rpm to 3120 rpm in 16 seconds. (i) What is its angular acceleration, assuming the acceleration to be uniform? (ii) How many revolutions does the engine make during this time?
Solution: (i) We shall use \(\omega=\omega_0+\alpha t\)
\(
\begin{aligned}
\omega_0= & \text { initial angular speed in } \mathrm{rad} / \mathrm{s} \\
& =2 \pi \times \text { angular speed in } \mathrm{rev} / \mathrm{s} \\
& =\frac{2 \pi \times \text { angular speed in } \mathrm{rev} / \mathrm{min}}{60 \mathrm{~s} / \mathrm{min}} \\
& =\frac{2 \pi \times 1200}{60} \mathrm{rad} / \mathrm{s} \\
& =40 \pi \mathrm{rad} / \mathrm{s}
\end{aligned}
\)
Similarly \(\omega=\) final angular speed in \(\mathrm{rad} / \mathrm{s}\)
\(
\begin{aligned}
& =\frac{2 \pi \times 3120}{60} \mathrm{rad} / \mathrm{s} \\
& =2 \pi \times 52 \mathrm{rad} / \mathrm{s} \\
& =104 \pi \mathrm{rad} / \mathrm{s}
\end{aligned}
\)
\(\therefore \quad\) Angular acceleration
\(
\alpha=\frac{\omega-\omega_0}{t}=4 \pi \mathrm{rad} / \mathrm{s}^2
\)
The angular acceleration of the engine = \(4 \pi \mathrm{rad} / \mathrm{s}^2\)
(ii) The angular displacement in time \(t\) is given by
\(
\begin{aligned}
& \theta=\omega_0 t+\frac{1}{2} \alpha t^2 \\
= & \left(40 \pi \times 16+\frac{1}{2} \times 4 \pi \times 16^2\right) \mathrm{rad} \\
= & (640 \pi+512 \pi) \mathrm{rad} \\
= & 1152 \pi \mathrm{rad}
\end{aligned}
\)
Number of revolutions \(=\frac{1152 \pi}{2 \pi}=576\)
Example 5: A wheel of perimeter 220 cm rolls on a level road at a speed of \(9 \mathrm{~km} / \mathrm{h}\). How many revolutions does the wheel make per second?
Solution: As the wheel rolls on the road, its angular speed \(\omega\) about the centre and the linear speed \(v\) of the centre are related as \(v=\omega r\).
\(
\begin{aligned}
\therefore \omega & =\frac{v}{r}=\frac{9 \mathrm{~km} / \mathrm{h}}{220 \mathrm{~cm} / 2 \pi}=\frac{2 \pi \times 9 \times 10^5}{220 \times 3600} \mathrm{rad} / \mathrm{s} . \\
& =\frac{900}{22 \times 36} \mathrm{rev} / \mathrm{s}=\frac{25}{22} \mathrm{rev} / \mathrm{s} .
\end{aligned}
\)
Example 6: The motor of an engine is rotating about its axis with an angular velocity of \(100 \mathrm{rev} /\) minute. It comes to rest in 15 s, after being switched off. Assuming constant angular deceleration, calculate the number of revolutions made by it before coming to rest.
Solution: The initial angular velocity \(=100 \mathrm{rev} /\) minute
\(
=(10 \pi / 3) \mathrm{rad} / \mathrm{s} .
\)
Final angular velocity \(=0\).
Time interval \(=15 \mathrm{~s}\).
Let the angular acceleration be \(\alpha\). Using the equation \(\omega=\omega_0+\alpha t\), we obtain \(\alpha=(-2 \pi / 9) \mathrm{rad} / \mathrm{s}^2\).
The angle rotated by the motor during this motion is
\(
\begin{aligned}
\theta & =\omega_0 t+\frac{1}{2} \alpha t^2 \\
& =\left(\frac{10 \pi}{3} \frac{\mathrm{rad}}{\mathrm{~s}}\right)(15 \mathrm{~s})-\frac{1}{2}\left(\frac{2 \pi}{9} \frac{\mathrm{rad}}{\mathrm{~s}^2}\right)(15 \mathrm{~s})^2 \\
& =25 \pi \mathrm{rad}=12.5 \text { revolutions. }
\end{aligned}
\)
Hence the motor rotates through 12.5 revolutions before coming to rest.
Example 7: A bucket is being lowered down into a well through a rope passing over a fixed pulley of radius 10 cm. Assume that the rope does not slip on the pulley. Find the angular velocity and angular acceleration of the pulley at an instant when the bucket is going down at a speed of \(20 \mathrm{~cm} / \mathrm{s}\) and has an acceleration of \(4.0 \mathrm{~m} / \mathrm{s}^2\).
Solution: Since the rope does not slip on the pulley, the linear speed \(v\) of the rim of the pulley is same as the speed of the bucket.
The angular velocity of the pulley is then
\(
\omega=v / r=\frac{20 \mathrm{~cm} / \mathrm{s}}{10 \mathrm{~cm}}=2 \mathrm{rad} / \mathrm{s}
\)
and the angular acceleration of the pulley is
\(
\alpha=a / r=\frac{4.0 \mathrm{~m} / \mathrm{s}^2}{10 \mathrm{~cm}}=40 \mathrm{rad} / \mathrm{s}^2
\)