6.15 Entrance Corner
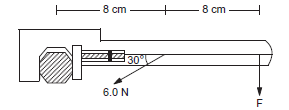
Q1. When a force of 6.0 N is exerted at \(30^{\circ}\) to a wrench at a distance of 8 cm from the nut, it is just able to loosen the nut. What force \(F\) would be sufficient to loosen it if it acts perpendicularly to the wrench at 16 cm from the nut?
Solution: To find the force \(F\) required to loosen the nut, we use the principle of torque ( \(\tau\) ), which is the rotational effect of a force. The torque is given by the formula:
\(
\tau=r \cdot F \cdot \sin (\theta)
\)
where:
\(r\) is the distance from the pivot (the nut) to the point where the force is applied.
\(F\) is the magnitude of the force.
\(\theta\) is the angle between the force and the wrench.
Step 1: Calculate the torque required to loosen the nut
From the first scenario:
Force \(F_1=6.0 N\)
Distance \(r_1=8 cm=0.08 m\)
Angle \(\theta_1=30^{\circ}\)
Substituting these values into the torque formula:
\(
\tau=0.08 m \cdot 6.0 N \cdot \sin \left(30^{\circ}\right)
\)
Since \(\sin \left(30^{\circ}\right)=0.5\) :
\(
\tau=0.08 \cdot 6.0 \cdot 0.5=0.24 N \cdot m
\)
Step 2: Solve for the new force \(F\)
In the second scenario, the torque required to loosen the nut remains the same ( \(\tau=0.24 N\). m ), but the conditions change:
Distance \(r_2=16 cm=0.16 m\)
Angle \(\theta_2=90^{\circ}\) (the force acts perpendicularly)
Force \(F_2=F\)
Using the torque formula again:
\(
\begin{gathered}
\tau=r_2 \cdot F \cdot \sin \left(\theta_2\right) \\
0.24 N \cdot m=0.16 m \cdot F \cdot \sin \left(90^{\circ}\right)
\end{gathered}
\)
Since \(\sin \left(90^{\circ}\right)=1\) :
\(
\begin{aligned}
&\begin{gathered}
0.24=0.16 \cdot F \\
F=\frac{0.24}{0.16}=1.5 N
\end{gathered}\\
&\text { Conclusion: A force of } 1.5 N \text { would be sufficient to loosen the nut. }
\end{aligned}
\)
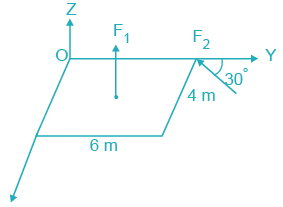
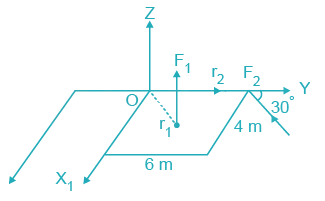
Q2. Calculate the total torque acting on the body shown in figure belo about the point \(O\).
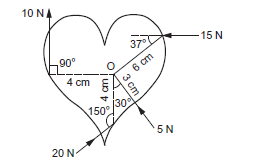
Solution: Torque \(1(15 N\) at 6 cm\(): 15 \times 0.06 \times \sin \left(37^{\circ}\right) \approx 0.54 N \cdot m\) (Anticlockwise).
Torque \(2(10 N\) at 4 cm\(): 10 \times 0.04=0.4 N \cdot m\) (Clockwise).
Torque \(3(20 N\) at 4 cm\(): 20 \times 0.04 \times \sin \left(30^{\circ}\right)=0.4 N \cdot m\) (Anticlockwise).
Torque on \(5 N\) at O: (As it Passes through pivot) \( 0 N \cdot m\)
Total Torque Calculation:
\(
\tau_{\text {total }}=0.54(ACW)-0.4(CW)+0.4(ACW)=0.54 N \cdot m
\)
Q3. A rod of mass \(m\) and length \(L\), lying horizontally, is free to rotate about a vertical axis through its centre. A horizontal force of constant magnitude \(F\) acts on the rod at a distance of \(L / 4\) from the centre. The force is always perpendicular to the rod. Find the angle rotated by the rod during the time \(t\) after the motion starts.
Solution: To find the angle rotated by the rod, we can use the rotational analogue of Newton’s second law and the equations of angular motion.
Step 1: Identify the Torque ( \(\tau\) )
The torque produced by a force is given by \(\tau=r F \sin (\theta)\). Since the force is always perpendicular to the rod, \(\sin \left(90^{\circ}\right)=1\).
Force: \(F\)
Distance from axis (lever arm \(r\) ): \(L / 4\)
Torque: \(\tau=F \cdot \frac{L}{4}\)
Step 2: Determine the Moment of Inertia ( \(I\) )
The rod rotates about a vertical axis passing through its center. The moment of inertia for a uniform rod of mass \(m\) and length \(L\) about its center is:
\(
I=\frac{m L^2}{12}
\)
Step 3: Calculate Angular Acceleration ( \(\alpha\) )
Using the formula \(\tau=I \alpha\) :
\(
\frac{F L}{4}=\left(\frac{m L^2}{12}\right) \alpha
\)
Solving for \(\alpha\) :
\(
\begin{gathered}
\alpha=\frac{F L}{4} \cdot \frac{12}{m L^2} \\
\alpha=\frac{3 F}{m L}
\end{gathered}
\)
Step 4: Find the Angle Rotated ( \(\theta\) )
Since the force \(F\) is constant and always perpendicular, the angular acceleration \(\alpha\) is constant. We can use the kinematic equation for rotational motion:
\(
\theta=\omega_0 t+\frac{1}{2} \alpha t^2
\)
Assuming the rod starts from rest ( \(\omega_0=0\) ):
\(
\begin{gathered}
\theta=\frac{1}{2}\left(\frac{3 F}{m L}\right) t^2 \\
\theta=\frac{3 F t^2}{2 m L}
\end{gathered}
\)
The angle rotated by the rod is \(\frac{3 F t^2}{2 m L}\).
Q4. A uniform rod pivoted at its upper end hangs vertically. It is displaced through an angle of \(60^{\circ}\) and then released. Find the magnitude of the force acting on a particle of mass \(d m\) at the tip of the rod when the rod makes an angle of \(37^{\circ}\) with the vertical.
Solution:
Step 1: Determine the angular velocity
Using the conservation of energy, the potential energy lost as the rod swings from \(60^{\circ}\) to \(37^{\circ}\) is converted into rotational kinetic energy. For a uniform rod pivoted at one end, the moment of inertia is \(I =\frac{ M L ^2}{3}\). The conservation of energy equation is \(\frac{1}{2} I \omega^2=\operatorname{Mg} \frac{L}{2}\left(\cos \theta_2-\cos \theta_1\right)\), where \(\theta_1=60^{\circ}\) and \(\theta_2=37^{\circ}\).
Solving for \(\omega^2\), we find \(\omega^2=\frac{9 g}{10 L}\).
Step 2: Determine the angular acceleration
The torque acting on the rod is due to gravity. The torque equation is \(\tau=I \alpha\). The torque is given by \(M g \frac{ L }{2} \operatorname { s i n } \left( \theta _2\right)\), and the moment of inertia is \(I =\frac{ M L ^2}{3}\).
Setting up the equation \(M g \frac{L}{2} \sin \left(37^{\circ}\right)=\left(\frac{M L^2}{3}\right) \alpha\) and solving for \(\alpha\), we find \(\alpha=\frac{9 g}{10 L}\).
Step 3: Calculate the forces on the particle
A particle of mass \(d m\) at the tip of the rod experiences a radial force (centripetal force) and a tangential force.
The radial force is \(F_C=d m \cdot \omega^2 L\). Substituting the value of \(\omega^2\), we get
\(
F_C=\frac{9}{10} g d m
\)
The tangential force is \(F_t=d m \cdot \alpha L\). Substituting the value of \(\alpha\), we get
\(
F_t=\frac{9}{10} g d m
\)
Step 4: Calculate the total force
The total force is the vector sum of the radial and tangential forces. Since they are perpendicular, the magnitude of the total force is \(F =\sqrt{ F _{ C }^2+ F _{ t }^2}\). Substituting the values of \(F_C\) and \(F_t\) :
\(
F=\sqrt{\left(\frac{9}{10} g d m\right)^2+\left(\frac{9}{10} g d m\right)^2}=\sqrt{2 \cdot\left(\frac{9}{10} g d m\right)^2}=
\)
\(
=\frac{9}{10} g d m \cdot \sqrt{2}=0.9 \sqrt{2} g d m
\)
The magnitude of the force acting on the particle of mass \(d m\) at the tip of the rod is \(F =0.9 \sqrt{2} g dm\).
Q5. A sphere of mass \(m\) rolls on a plane surface. Find its kinetic energy at an instant when its centre moves with speed \(v\).
Solution:
To find the total kinetic energy of a rolling sphere, we must account for both its translational motion and its rotational motion.
Step 1: Translational Kinetic Energy ( \(K_t\) )
The center of mass of the sphere moves with a speed \(v\). The kinetic energy due to this linear motion is:
\(
K_t=\frac{1}{2} m v^2
\)
Step 2: Rotational Kinetic Energy ( \(K_r\) )
The sphere is also rotating about its center. The rotational kinetic energy is given by:
\(
K_r=\frac{1}{2} I \omega^2
\)
Moment of Inertia ( \(I\) ): For a solid sphere of mass \(m\) and radius \(r\) rotating about its center, \(I=\frac{2}{5} m r^2\).
Angular Velocity ( \(\omega\) ): For rolling without slipping, the relationship between linear speed and angular velocity is \(v=\omega r\), which means \(\omega=\frac{v}{r}\).
Substituting these into the formula:
\(
\begin{gathered}
K_r=\frac{1}{2}\left(\frac{2}{5} m r^2\right)\left(\frac{v}{r}\right)^2 \\
K_r=\frac{1}{2} \cdot \frac{2}{5} \cdot m \cdot r^2 \cdot \frac{v^2}{r^2}=\frac{1}{5} m v^2
\end{gathered}
\)
Step 3: Total Kinetic Energy ( \(K_{\text {total }}\) )
The total kinetic energy is the sum of the translational and rotational parts:
\(
\begin{gathered}
K_{\text {total }}=K_t+K_r \\
K_{\text {total }}=\frac{1}{2} m v^2+\frac{1}{5} m v^2
\end{gathered}
\)
To add these, we find a common denominator (10):
\(
K_{\text {total }}=\frac{5}{10} m v^2+\frac{2}{10} m v^2=\frac{7}{10} m v^2
\)
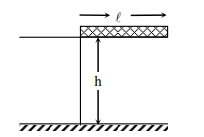
Q6. A string is wrapped over the edge of a uniform disc and the free end is fixed with the ceiling. The disc moves down, unwinding the string. Find the downward acceleration of the disc.
Solution:
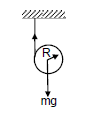
To find the downward acceleration of a disc unwinding from a fixed string, we analyze both the linear motion of its center of mass and its rotational motion about that center.
Step 1: Identify the Forces
As the disc falls, two main forces act on it:
Weight ( \(M g\) ): Acting downwards from the center of mass.
Tension (\(T\)): Acting upwards along the string at the edge of the disc.
Step 2: Equations of Motion
We apply Newton’s second law for both translation and rotation:
Translational Motion (Linear): The net downward force is \(M g-T\).
\(
M g-T=M a
\)
Rotational Motion: The tension \(T\) creates a torque \(\tau\) about the center of the disc. The distance from the center to the edge is the radius \(R\).
\(
\tau=T \cdot R=I \alpha
\)
For a uniform disc, the moment of inertia is \(I=\frac{1}{2} M R^2\). Substituting this in:
\(
T R=\left(\frac{1}{2} M R^2\right) \alpha
\)
Step 3: Constraint Relationship
Because the string does not slip, the linear acceleration \(a\) of the center of mass is related to the angular acceleration \(\alpha\) by:
\(
a=R \alpha \Longrightarrow \alpha=\frac{a}{R}
\)
Substitute \(\alpha\) into the torque equation:
\(
\begin{gathered}
T R=\frac{1}{2} M R^2\left(\frac{a}{R}\right) \\
T=\frac{1}{2} M a
\end{gathered}
\)
Step 4: Solve for Acceleration (\(a\))
Now, substitute the expression for tension \(T\) back into the translational equation ( \(M g-T=\) Ma):
\(
\begin{gathered}
M g-\frac{1}{2} M a=M a \\
M g=M a+\frac{1}{2} M a \\
M g=\frac{3}{2} M a
\end{gathered}
\)
Dividing both sides by \(M\) :
\(
g=\frac{3}{2} a \Longrightarrow a=\frac{2}{3} g
\)
The downward acceleration of the disc is \(\frac{2}{3} g\).
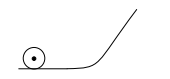
Q7. A small spherical ball is released from a point at a height \(h\) on a rough track shown in figure below. Assuming that it does not slip anywhere, find its linear speed when it rolls on the horizontal part of the track.

Solution:
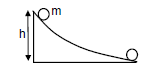
To find the linear speed of the ball on the horizontal part of the track, we use the Principle of Conservation of Energy. Since the ball rolls without slipping, the total mechanical energy at the starting height \(h\) must equal the total kinetic energy at the bottom.
Step 1: Energy at the Initial Point
At height \(h\), the ball is at rest, so its energy is entirely gravitational potential energy:
Potential Energy \(\left(U_i\right)\) : \(m g h\)
Kinetic Energy \(\left(K_i\right)\) : 0
Step 2: Energy at the Horizontal Part
On the horizontal track, the potential energy is zero (relative to the bottom), and the ball has two types of kinetic energy because it is rolling:
Translational Kinetic Energy \(\left(K_t\right): \frac{1}{2} m v^2\)
Rotational Kinetic Energy \(\left(K_r\right): \frac{1}{2} I \omega^2\)
Step 3: Applying Constraints for a Sphere
For a small spherical ball:
Moment of Inertia ( \(I\) ): \(\frac{2}{5} m r^2\) (assuming it is a solid sphere)
Rolling Condition: Since it does not slip, \(\omega=\frac{v}{r}\)
Substituting these into the rotational kinetic energy formula:
\(
K_r=\frac{1}{2}\left(\frac{2}{5} m r^2\right)\left(\frac{v}{r}\right)^2=\frac{1}{5} m v^2
\)
Step 4: Conservation Equation
Total Initial Energy = Total Final Energy
\(
m g h=\frac{1}{2} m v^2+\frac{1}{5} m v^2
\)
Combine the kinetic energy terms:
\(
\begin{gathered}
m g h=\left(\frac{5}{10}+\frac{2}{10}\right) m v^2 \\
m g h=\frac{7}{10} m v^2
\end{gathered}
\)
\(
\begin{aligned}
&v=\sqrt{\frac{10 g h}{7}}\\
&\text { Final Result: The linear speed of the ball on the horizontal part of the track is } \sqrt{\frac{10 g h}{7}} \text {. }
\end{aligned}
\)
Q8. A sphere starts rolling down an incline of inclination \(\theta\). Find the speed of its centre when it has covered a distance \(l\).
Solution:
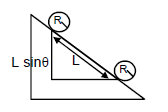
To find the speed of the center of the sphere, we can use the Principle of Conservation of Energy. As the sphere rolls down the incline, its gravitational potential energy is converted into both translational and rotational kinetic energy.
Step 1: Determine the Change in Height (\(h\))
When the sphere covers a distance \(l\) along an incline with inclination \(\theta\), the vertical height it descends is:
\(
h=l \sin (\theta)
\)
Step 2: Initial and Final Energy
Initial Energy: The sphere starts from rest, so its energy is entirely potential:
\(
E_i=m g h=m g l \sin (\theta)
\)
Final Energy: At the bottom of the distance \(l\), the sphere has both translational and rotational kinetic energy:
\(
E_f=\frac{1}{2} m v^2+\frac{1}{2} I \omega^2
\)
Step 3: Apply Constraints for a Solid Sphere
Moment of Inertia \((I)\) : For a solid sphere, \(I=\frac{2}{5} m r^2\).
Rolling Condition: Since it rolls without slipping, \(\omega=\frac{v}{r}\).
Substituting these into the final energy equation:
\(
\begin{aligned}
& E_f=\frac{1}{2} m v^2+\frac{1}{2}\left(\frac{2}{5} m r^2\right)\left(\frac{v}{r}\right)^2 \\
& E_f=\frac{1}{2} m v^2+\frac{1}{5} m v^2=\frac{7}{10} m v^2
\end{aligned}
\)
Step 4: Conservation Equation
Setting \(E_i=E_f\) :
\(
m g l \sin (\theta)=\frac{7}{10} m v^2
\)
\(
v=\sqrt{\frac{10 g l \sin (\theta)}{7}}
\)
The speed of the center of the sphere after covering distance \(l\) is \(\sqrt{\frac{10 g l \sin (\theta)}{7}}\).
Q9. A hollow sphere is released from the top of an inclined plane of inclination \(\theta\). (a) What should be the minimum coefficient of friction between the sphere and the plane to prevent sliding ? (b) Find the kinetic energy of the ball as it moves down a length \(l\) on the incline if the friction coefficient is half the value calculated in part (a).
Solution:
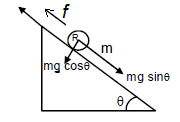
This problem involves analyzing the forces and torques acting on a rolling hollow sphere. For a hollow sphere of mass \(M\) and radius \(R\), the moment of inertia about its center is \(I=\frac{2}{3} M R^2\).
(a) Minimum Coefficient of Friction to Prevent Sliding
To prevent sliding (pure rolling), the acceleration of the center of mass ( \(a\) ) must be related to the angular acceleration ( \(\alpha\) ) by \(a=R \alpha\).
1. Equations of Motion:
Parallel to incline: \(M g \sin \theta-f=M a\)
Torque about center: \(\tau=f \cdot R=I \alpha\)
2. Solve for Acceleration ( \(a\) ): Substituting \(I=\frac{2}{3} M R^2\) and \(\alpha=a / R\) into the torque equation:
\(
f R=\left(\frac{2}{3} M R^2\right)\left(\frac{a}{R}\right) \Longrightarrow f=\frac{2}{3} M a
\)
Substitute \(f\) back into the force equation:
\(
M g \sin \theta-\frac{2}{3} M a=M a
\)
\(
M g \sin \theta=\frac{5}{3} M a \Longrightarrow a=\frac{3}{5} g \sin \theta
\)
3. Find Friction Coefficient \((\mu)\) : The required friction force is \(f=\frac{2}{3} M\left(\frac{3}{5} g \sin \theta\right)= \frac{2}{5} M g \sin \theta\). Since \(f \leq \mu N\) and \(N=M g \cos \theta\) :
\(
\begin{gathered}
\frac{2}{5} M g \sin \theta \leq \mu M g \cos \theta \\
\mu_{\min }=\frac{2}{5} \tan \theta
\end{gathered}
\)
(b) Kinetic Energy with Reduced Friction
If \(\mu=\frac{1}{2} \mu_{\min }=\frac{1}{5} \tan \theta\), the sphere will slide and rotate simultaneously because the friction is insufficient to maintain pure rolling.
1. New Acceleration and Friction: The kinetic friction is \(f_k=\mu N= \left(\frac{1}{5} \tan \theta\right)(M g \cos \theta)=\frac{1}{5} M g \sin \theta\).
Linear acceleration ( \(a\) ): \(M g \sin \theta-\frac{1}{5} M g \sin \theta=M a \Longrightarrow a=\frac{4}{5} g \sin \theta\)
Angular acceleration \((\alpha): \tau=f_k R=I \alpha \Longrightarrow\left(\frac{1}{5} M g \sin \theta\right) R=\left(\frac{2}{3} M R^2\right) \alpha \Longrightarrow \alpha=\frac{3 g \sin \theta}{10 R}\)
2. Velocities after distance \(l\):
Linear velocity \((v): v^2=2 a l=2\left(\frac{4}{5} g \sin \theta\right) l=\frac{8}{5} g l \sin \theta\)
Angular velocity \((\omega)\) : Using \(t=\sqrt{2 l / a}\) and \(\omega=\alpha t: \omega^2=\alpha^2\left(\frac{2 l}{a}\right)= \left(\frac{3 g \sin \theta}{10 R}\right)^2 \frac{2 l}{(4 / 5) g \sin \theta}=\frac{9 g^2 \sin ^2 \theta}{100 R^2} \cdot \frac{10 l}{4 g \sin \theta}=\frac{9 g l \sin \theta}{40 R^2}\)
3. Total Kinetic Energy \((K)\) :
\(
\begin{gathered}
K=\frac{1}{2} M v^2+\frac{1}{2} I \omega^2 \\
K=\frac{1}{2} M\left(\frac{8}{5} g l \sin \theta\right)+\frac{1}{2}\left(\frac{2}{3} M R^2\right)\left(\frac{9 g l \sin \theta}{40 R^2}\right)
\end{gathered}
\)
\(
\begin{aligned}
&\begin{gathered}
K=\frac{4}{5} M g l \sin \theta+\frac{3}{40} M g l \sin \theta=\left(\frac{32+3}{40}\right) M g l \sin \theta \\
K=\frac{35}{40} M g l \sin \theta=\frac{7}{8} M g l \sin \theta
\end{gathered}\\
&\text { Results: (a) Minimum coefficient of friction: } \frac{2}{5} \tan \theta \text { (b) Total kinetic energy: } \frac{7}{8} M g l \sin \theta
\end{aligned}
\)
Q10. A solid sphere of mass \(m\) is released from rest from the rim of a hemispherical cup so that it rolls along the surface. If the rim of the hemisphere is kept horizontal, find the normal force exerted by the cup on the ball when the ball reaches the bottom of the cup.
Solution: To find the normal force exerted by the cup on the ball at the bottom, we need to determine the ball’s velocity at that point and then apply the laws of circular motion.
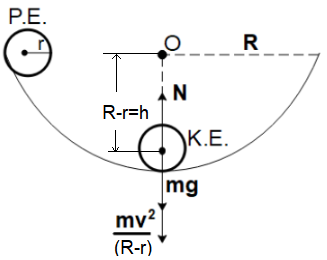
Let \(R\) be the radius of the hemispherical cup and \(r\) be the radius of the solid sphere. When the ball rolls from the rim to the bottom, the vertical distance its center of mass descends is \(h= R-r\).
Step 1: Velocity at the Bottom (Energy Conservation)
As the sphere rolls without slipping, its initial potential energy is converted into both translational and rotational kinetic energy.
Potential Energy Loss: \(m g(R-r)\)
Total Kinetic Energy: \(\frac{1}{2} m v^2+\frac{1}{2} I \omega^2\)
For a solid sphere, \(I=\frac{2}{5} m r^2\) and \(\omega=\frac{v}{r}\).
\(
\begin{aligned}
& m g(R-r)=\frac{1}{2} m v^2+\frac{1}{2}\left(\frac{2}{5} m r^2\right)\left(\frac{v}{r}\right)^2 \\
& m g(R-r)=\frac{1}{2} m v^2+\frac{1}{5} m v^2=\frac{7}{10} m v^2
\end{aligned}
\)
\(v^2=\frac{10}{7} g(R-r)\)
Step 2: Normal Force at the Bottom
At the bottom of the cup, the ball is moving in a circular path of radius ( \(R-r\) ). Two vertical forces act on it: the normal force (\(N\)) acting upward and the weight (\(m g\)) acting downward. The net force provides the centripetal acceleration.
Newton’s Second Law for Circular Motion:
\(
N-m g=\frac{m v^2}{(R-r)}
\)
Substitute the expression for \(v^2\) found in Step 1:
\(
\begin{gathered}
N-m g=\frac{m \cdot \frac{10}{7} g(R-r)}{(R-r)} \\
N-m g=\frac{10}{7} m g
\end{gathered}
\)
\(
N=\frac{17}{7} m g
\)
The normal force exerted by the cup on the ball when it reaches the bottom is \(\frac{17}{7} mg\).
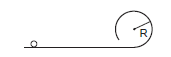
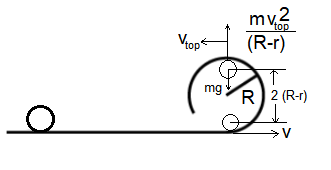
Q11. Figure below shows a rough track, a portion of which is in the form of a cylinder of radius \(R\). With what minimum linear speed should a sphere of radius \(r\) be set rolling on the horizontal part so that it completely goes round the circle on the cylindrical part.
Solution:
To ensure that a solid sphere completes a vertical circle on a cylindrical track of radius \(R\) without slipping, we must analyze the energy and forces at the highest point of the track.
Step 1: Condition for Completing the Circle
For the sphere to stay in contact with the track at the highest point (top of the circle), the normal force \(N\) must be greater than or equal to zero. At the minimum speed, \(N=0\).
At the top, the center of mass of the sphere moves in a circle of radius \((R-r)\). The forces providing the centripetal acceleration are:
\(
\begin{gathered}
m g=\frac{m v_{\text {top }}^2}{R-r} \\
v_{\text {top }}^2=g(R-r)
\end{gathered}
\)
Step 2: Conservation of Energy
We compare the total energy at the horizontal part (start) with the total energy at the highest point.
Initial Energy \(\left(E_1\right)\) :
\(
E_1=\frac{1}{2} m v^2+\frac{1}{2} I \omega^2
\)
For a solid sphere, \(I=\frac{2}{5} m r^2\) and \(\omega=\frac{v}{r}\).
\(
E_1=\frac{1}{2} m v^2+\frac{1}{2}\left(\frac{2}{5} m r^2\right)\left(\frac{v}{r}\right)^2=\frac{7}{10} m v^2
\)
Final Energy at Top ( \(E_2\) ): The height of the center of mass at the top is \(h=2(R-r)\).
\(
E_2=\frac{7}{10} m v_{t o p}^2+m g(2(R-r))
\)
Step 3: Solving for Minimum Speed (\(v\)) (Let the sphere is thrown with a velocity \(v\))
Equating \(E_1\) and \(E_2\) :
\(
\frac{7}{10} m v^2=\frac{7}{10} m v_{\text {top }}^2+2 m g(R-r)
\)
Substitute \(v_{\text {top }}^2=g(R-r)\) :
\(
\begin{gathered}
\frac{7}{10} v^2=\frac{7}{10} g(R-r)+2 g(R-r) \\
\frac{7}{10} v^2=\left(\frac{7}{10}+2\right) g(R-r) \\
\frac{7}{10} v^2=\frac{27}{10} g(R-r)
\end{gathered}
\)
\(
\begin{aligned}
&v=\sqrt{\frac{27}{7} g(R-r)}\\
&\text { Final Result: The minimum linear speed required is } \sqrt{\frac{27}{7} g(R-r)} \text {. }
\end{aligned}
\)
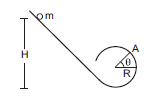
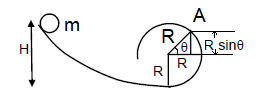
Q12. Figure below shows a small spherical ball of mass \(m\) rolling down the loop track. The ball is released on the linear portion at a vertical height \(H\) from the lowest point. The circular part shown has a radius \(R\).
(a) Find the kinetic energy of the ball when it is at a point \(A\) where the radius makes an angle \(\theta\) with the horizontal.
(b) Find the radial and the tangential accelerations of the centre when the ball is at \(A\).
(c) Find the normal force and the frictional force acting on the ball if \(H=60 cm, R=10 cm, \theta=0\) and \(m=70 g\).
Solution:
To solve this problem, we apply the principles of conservation of energy and rotational mechanics for a rolling solid sphere. We assume the ball is a solid sphere \(\left(I=\frac{2}{5} m r^2\right)\) and rolls without slipping \((v=\omega r)\).
(a) Kinetic Energy at Point A
As the ball rolls down from height \(H\), its potential energy is converted into total kinetic energy.
Initial Energy \(\left(E_{\hat{i}}\right)\) : \(m g H\)
Height at Point \(A \left(h_A\right)\) : Point \(A\) is at an angle \(\theta\) with the horizontal. Its vertical height from the lowest point is \(h_A=R+R \sin \theta\).
Potential Energy at A ( \(U_A\) ): \(m g(R+R \sin \theta)\)
By conservation of energy, the Total Kinetic Energy ( \(K\) ) is:
\(
\begin{gathered}
K=E_i-U_A \\
K=m g H-m g R(1+\sin \theta) \\
K=m g(H-R-R \sin \theta)
\end{gathered}
\)
(b) Radial and Tangential Accelerations
Radial (Centripetal) Acceleration ( \(a_r\) ): The total kinetic energy of a rolling sphere is \(K= \frac{7}{10} m v^2\). Using the result from part (a):
\(
\frac{7}{10} m v^2=m g(H-R-R \sin \theta) \Longrightarrow v^2=\frac{10}{7} g(H-R-R \sin \theta)
\)
The center of the ball moves in a circle of radius \((R-r) \approx R\).
\(
a_r=\frac{v^2}{R}=\frac{10 g(H-R-R \sin \theta)}{7 R}
\)
Tangential Acceleration \(\left(a_t\right)\) : The tangential force is the component of gravity \(m g \cos \theta\) minus friction \(f\). For a rolling object on a circular path: \(a_t=\frac{g \cos \theta}{1+1 / m r^2}=\frac{g \cos \theta}{1+2 / 5}=\frac{5}{7} g \cos \theta\)
(c) Normal and Frictional Forces
Given: \(H=60 cm, R=10 cm, \theta=0^{\circ}, m=70 g=0.07 kg\). Take \(g=9.8 m / s ^2\).
1. Normal Force \((N)\) : At \(\theta=0\), the radial acceleration is \(a_r=\frac{10 g(H-R)}{7 R}\).
\(
a_r=\frac{10 \cdot 9.8 \cdot(0.60-0.10)}{7 \cdot 0.10}=\frac{10 \cdot 9.8 \cdot 0.50}{0.7}=70 m / s^2
\)
The radial force equation is \(N-m g \sin \theta=m a_r\). Since \(\sin (0)=0\) :
\(
N=m a_r=0.07 kg \cdot 70 m / s^2=4.9 N
\)
2. Frictional Force ( \(f\) ): Using the torque equation \(\tau=f \cdot r=I \alpha\) and \(a_t=r \alpha\) :
\(
f=\frac{I a_t}{r^2}=\frac{2}{5} m a_t
\)
At \(\theta=0, a_t=\frac{5}{7} g \cos (0)=\frac{5}{7} g\).
\(
f=\frac{2}{5} m\left(\frac{5}{7} g\right)=\frac{2}{7} m g
\)
\(
f=\frac{2}{7} \cdot 0.07 kg \cdot 9.8 m / s^2=0.196 N
\)
Q13. A thin spherical shell of radius \(R\) lying on a rough horizontal surface is hit sharply and horizontally by a cue. Where should it be hit so that the shell does not slip on the surface?
Solution:
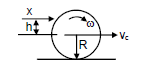
When you apply the Law of Conservation of Angular Momentum about the center of the shell, you are essentially balancing the linear impulse and the angular impulse provided by the cue.
Linear Impulse \((J)\) : The cue provides a change in linear momentum, \(J=m v_c\).
Angular Impulse \((\tau \Delta t)\) : The cue provides a change in angular momentum, \(J \cdot h=I \omega\).
Substitution: By substituting \(J\) into the angular equation ( \(m v_c h=I \omega\) ), you link the two types of motion.
For a thin spherical shell (hollow sphere) of mass \(M\) and radius \(R\) :
Moment of Inertia \((I): I=\frac{2}{3} M R^2\)
Substituting \(I\) into the angular impulse equation:
\(
J h=\left(\frac{2}{3} M R^2\right) \omega \Longrightarrow \omega=\frac{3 J h}{2 M R^2}
\)
\(
h=\frac{2}{3} R
\)
The height \(h\) is measured from the center of the shell.
Note: To find the total height \((H)\) from the horizontal surface:
\(
\begin{gathered}
H=R+h \\
H=R+\frac{2}{3} R=\frac{5}{3} R
\end{gathered}
\)
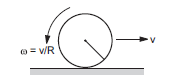
Q14. A solid sphere is set into motion on a rough horizontal surface with a linear speed \(v\) in the forward direction and an angular speed \(v / R\) in the anticlockwise direction as shown in figure below. Find the linear speed of the sphere (a) when it stops rotating and (b) when slipping finally ceases and pure rolling starts.
Solution: (a): Linear speed when it stops rotating
Initial angular momentum ( \(L_i\) ) about a point on the ground:
\(
m v R-I \omega=m v R-\frac{2}{5} m R^2\left(\frac{v}{R}\right)=\frac{3}{5} m v R
\)
When rotation stops, angular velocity \(\omega=0\). Let the new linear speed be \(v^{\prime}\).
Final angular momentum \(\left(L_f\right): m v^{\prime} R\).
Equating \(L_i=L_f: \frac{3}{5} m v R=m v^{\prime} R \Rightarrow v^{\prime}=\frac{3}{5} v\).
(b): Linear speed when pure rolling starts
Pure rolling starts when \(v_{\text {rolling }}=\omega_{\text {rolling }} R\).
Equating initial angular momentum to final angular momentum during pure rolling
\(
\left(m v^{\prime} R+I \omega_{\text {rolling }}=m v_{\text {final }} R+\frac{2}{5} m R^2 \frac{v_{\text {final }}}{R}\right):
\)
\(\frac{3}{5} m v R=\frac{7}{5} m v_{\text {final }} R\).
\(\circ v_{f i n a l}=\frac{3}{7} v\).
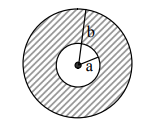
Q15. A circular disc of radius b has a hole of radius a at its centre (see figure). If the mass per unit area of the disc varies as \(\left(\frac{\sigma_0}{r}\right)\), then the radius of gyration of the disc about its axis passing through the centre is: [JEE Main 2019]
(a) \(\sqrt{\frac{a^2+b^2+a b}{2}}\)
(b) \(\sqrt{\frac{a+b}{3}}\)
(c) \(\sqrt{\frac{a^2+b^2+a b}{3}}\)
(d) \(\sqrt{\frac{a+b}{2}}\)
Solution: (c) Step 1: Calculate Total Mass (\(M\))
The differential mass element \(d M\) for a ring of radius \(r\) and thickness \(d r\) is
\(
d M=\sigma(r) \cdot d A=\left(\frac{\sigma_0}{r}\right)(2 \pi r d r)=2 \pi \sigma_0 d r
\)
The total mass \(M\) is obtained by integrating \(d M\) from the inner radius \(a\) to the outer radius \(b\) :
\(
M=\int_a^b 2 \pi \sigma_0 d r=2 \pi \sigma_0[r]_a^b=2 \pi \sigma_0(b-a)
\)
Step 2: Calculate Moment of Inertia (\(I\))
The moment of inertia \(d I\) of the differential ring is \(d I=r^2 d M=r^2\left(2 \pi \sigma_0 d r\right)=2 \pi \sigma_0 r^2 d r\).
The total moment of inertia \(I\) is obtained by integrating \(d I\) from \(a\) to \(b\) :
\(
I=\int_a^b 2 \pi \sigma_0 r^2 d r=2 \pi \sigma_0\left[\frac{r^3}{3}\right]_a^b=\frac{2 \pi \sigma_0}{3}\left(b^3-a^3\right)
\)
Step 3: Calculate Radius of Gyration (\(K\))
The radius of gyration \(K\) is defined by the relation \(I=M K^2\), so \(K^2=\frac{I}{M}\).
\(
K^2=\frac{\frac{2 \pi \sigma_0}{3}\left(b^3-a^3\right)}{2 \pi \sigma_0(b-a)}
\)
Simplifying the expression using the difference of cubes identity ( \(\left.b^3-a^3=(b-a)\left(b^2+a b+a^2\right)\right):\)
\(
K^2=\frac{b^2+a b+a^2}{3}
\)
The radius of gyration \(K\) is the square root of \(K^2\) :
\(
K=\sqrt{\frac{a^2+a b+b^2}{3}}
\)
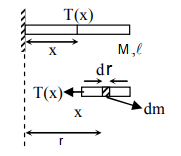
Q16. A uniform rod of length \(\ell\) is being rotated in a horizontal plane with a constant angular speed about an axis passing through one of its ends. If the tension generated in the rod due to rotation is \(T(x)\) at a distance \(x\) from the axis, then which of the following graphs depicts it most closely? [JEE Main 2019]
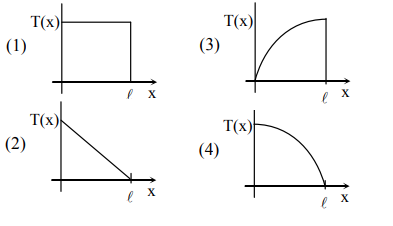
Solution: (4)
To determine the correct graph for the tension \(T(x)\) in the rod, we must analyze how the tension varies along its length as it rotates.
Step 1: Physics of the Tension
Consider a uniform rod of mass \(M\) and length \(l\) rotating with a constant angular speed \(\omega\). When the rod rotates, any small segment of the rod requires a centripetal force to keep it in its circular path. This force is provided by the difference in tension across the segment.
Step 2: Deriving the Equation for \(T(x)\)
Let the mass per unit length of the rod be \(\lambda=\frac{M}{l}\). Consider a small element of length \(d r\) at a distance \(r\) from the axis of rotation.
Mass of the element: \(d m=\lambda d r\)
Centripetal force required for this element: \(d F=(d m) \cdot \omega^2 \cdot r=(\lambda d r) \cdot \omega^2 \cdot r\)
The tension \(T(x)\) at a distance \(x\) must provide the centripetal force for the entire part of the rod lying between \(x\) and \(l\).
\(
T(x)=\int_x^l \lambda \omega^2 r d r
\)
Performing the integration:
\(
\begin{gathered}
T(x)=\lambda \omega^2\left[\frac{r^2}{2}\right]_x^l \\
T(x)=\frac{\lambda \omega^2}{2}\left(l^2-x^2\right)
\end{gathered}
\)
Substituting \(\lambda=\frac{M}{l}\) :
\(
T(x)=\frac{M \omega^2}{2 l}\left(l^2-x^2\right)
\)
\(
T(x)=A-B x^2 \text { (Parabola, mouth down) }
\)
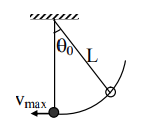
Q17. A person of mass \(M\) is, sitting on a swing of length \(L\) and swinging with an angular amplitude \(\theta_0\). If the person stands up when the swing passes through its lowest point, the work done by him, assuming that his center of mass moves by a distance \(\ell(\ell \ll L )\), is close to; [JEE Main 2019]
(a) \(mg \ell\left(1+\theta_0{ }^2\right)\)
(b) \(mg \ell\)
(c) \(mg \ell\left(1+\frac{\theta_0^2}{2}\right)\)
(d) \(mg \ell\left(1-\theta_0{ }^2\right)\)
Solution: (a) To solve this problem, we analyze the energy and angular momentum of the system at the lowest point of the swing. The work done by the person consists of two parts: the work done against gravity and the work done to change the rotational kinetic energy of the system.
Step 1: Velocity at the Lowest Point
Before standing up, the person is swinging with an angular amplitude \(\theta_0\). Using conservation of energy from the maximum height to the lowest point:
Initial Potential Energy: \(M g L\left(1-\cos \theta_0\right) \approx M g L \frac{\theta_0^2}{2}\) (using small angle approximation).
Kinetic Energy at bottom: \(\frac{1}{2} M v_1^2\).
Equating them: \(v_1=\sqrt{g L \theta_0^2}=L \theta_0 \sqrt{\frac{g}{L}}\).
Step 2: Conservation of Angular Momentum
When the person stands up quickly at the lowest point, the external torque is zero, so angular momentum ( \(L=I \omega\) ) is conserved about the pivot.
Initial Moment of Inertia: \(I_1=M L^2\).
Final Moment of Inertia: \(I_2=M(L-\ell)^2\).
Initial Angular Velocity: \(\omega_1=\frac{v_1}{L}\).
Conservation: \(I_1 \omega_1=I_2 \omega_2 \Longrightarrow M L^2 \omega_1=M(L-\ell)^2 \omega_2\).
Since \(\ell \ll L\), we use binomial approximation \((L-\ell)^2 \approx L^2\left(1-\frac{2 \ell}{L}\right)\).
\(\omega_2=\omega_1 \frac{L^2}{(L-\ell)^2} \approx \omega_1\left(1+\frac{2 \ell}{L}\right)\).
Step 3: Change in Kinetic Energy ( \(\Delta K\) )
The work done by the person to change the rotation is the change in kinetic energy:
\(
\begin{gathered}
\Delta K=\frac{1}{2} I_2 \omega_2^2-\frac{1}{2} I_1 \omega_1^2=\frac{1}{2} \frac{\left(I_1 \omega_1\right)^2}{I_2}-\frac{1}{2} I_1 \omega_1^2 \\
\Delta K=\frac{1}{2} I_1 \omega_1^2\left(\frac{I_1}{I_2}-1\right) \approx \frac{1}{2} M L^2 \omega_1^2\left(\frac{L^2}{L^2(1-2 \ell / L)}-1\right) \\
\Delta K \approx \frac{1}{2} M v_1^2\left(1+\frac{2 \ell}{L}-1\right)=M v_1^2 \frac{\ell}{L}
\end{gathered}
\)
Substitute \(v_1^2=g L \theta_0^2\) :
\(
\Delta K=M\left(g L \theta_0^2\right) \frac{\ell}{L}=M g \ell \theta_0^2
\)
Step 4: Total Work Done ( \(W\) )
The total work done is the sum of the work done against gravity and the work done to increase the kinetic energy:
\(
\begin{gathered}
W=W_{\text {gravity }}+\Delta K \\
W=M g \ell+M g \ell \theta_0^2 \\
W=M g \ell\left(1+\theta_0^2\right)
\end{gathered}
\)
The work done is close to (a) \(M g \ell\left(1+\theta_0^2\right)\).
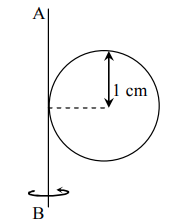
Q18. A metal coin of mass 5 g and radius 1 cm is fixed to a thin stick \(A B\) of negligible mass as shown in the figure. The system is initially at rest. The constant torque, that will make the system rotate about AB at 25 rotations per second in 5 s , is close to : [JEE Main 2019]
(a) \(7.9 \times 10^{-6} Nm\)
(b) \(4.0 \times 10^{-6} Nm\)
(c) \(2.0 \times 10^{-5} Nm\)
(d) \(1.6 \times 10^{-5} Nm\)
Solution: )c) The coin is a disc of mass \(m=5 g\) and radius \(r=1 cm\). In this specific problem, the coin is fixed to the stick \(A B\) such that the stick is tangent to the edge of the coin, not passing through its diameter.
Step 1: Correct Moment of Inertia ( \(I\) )
To find the moment of inertia about the axis \(A B\) (the stick), we use the Parallel Axis Theorem:
\(I_{c m}\) : The moment of inertia about a diameter parallel to the stick is \(\frac{1}{4} m r^2\).
Distance ( \(d\) ): The distance from the center of the coin to the stick \(A B\) is the radius \(r\).
\(
\begin{gathered}
I_{A B}=I_{c m}+m d^2 \\
I_{A B}=\frac{1}{4} m r^2+m r^2=\frac{5}{4} m r^2
\end{gathered}
\)
Plugging in the values:
\(m=5 \times 10^{-3} kg\)
\(r=1 \times 10^{-2} m\)
\(
I_{A B}=\frac{5}{4} \times\left(5 \times 10^{-3}\right) \times\left(10^{-2}\right)^2=6.25 \times 10^{-7} kg \cdot m^2
\)
Step 2: Angular Acceleration ( \(\alpha\) )
Final frequency ( \(f\) ): \(25 rev / s\)
Final angular velocity \((\omega): 2 \pi f=2 \pi(25)=50 \pi rad / s\)
Time \((t): 5 s\)
\(
\alpha=\frac{\omega-\omega_0}{t}=\frac{50 \pi-0}{5}=10 \pi rad / s^2
\)
Step 3: Constant Torque ( \(\tau\) )
\(
\begin{gathered}
\tau=I_{A B} \cdot \alpha \\
\tau=\left(6.25 \times 10^{-7}\right) \times(10 \pi) \\
\tau=62.5 \pi \times 10^{-7} N \cdot m
\end{gathered}
\)
\(
\tau \approx 1.96 \times 10^{-5} N \cdot m
\)
Result: The constant torque is close to \(2.0 \times 10^{-5} N \cdot m\).
Q19. A solid sphere of mass \(M\) and radius \(R\) is divided into two unequal parts. The first part has a mass of \(\frac{7 M}{8}\) and is converted into a uniform disc of radius 2 R. The second part is converted into a uniform solid sphere. Let \(I _1\) be the moment of inertia of the disc about its axis and \(I_2\) be the moment of inertia of the new sphere about its axis. The ratio \(I_1 / I_2\) is given by: [JEE Main 2019]
(a) 65
(b) 140
(c) 185
(d) 285
Solution: (b) To find the ratio \(I_1 / I_2\), we need to calculate the moment of inertia for both the newly formed disc and the new solid sphere based on their respective masses and radii.
Step 1: Properties of the First Part (The Disc)
The first part of the original sphere is converted into a uniform disc.
Mass \(\left(m_1\right): \frac{7 M}{8}\)
Radius \(\left(r_1\right)\) : \(2 R\)
Moment of Inertia ( \(I_1\) ): For a uniform disc about its central axis, \(I=\frac{1}{2} m r^2\).
\(
\begin{gathered}
I_1=\frac{1}{2}\left(\frac{7 M}{8}\right)(2 R)^2 \\
I_1=\frac{1}{2} \cdot \frac{7 M}{8} \cdot 4 R^2=\frac{7 M R^2}{4}
\end{gathered}
\)
Step 2: Properties of the Second Part (The New Sphere)
The remaining mass is converted into a new uniform solid sphere.
Mass \(\left(m_2\right): M-\frac{7 M}{8}=\frac{M}{8}\)
Radius \(\left(r_2\right)\) : To find the new radius, we use the fact that the density remains the same or simply relate volume to mass. Since \(m \propto r^3\) for spheres of the same material:
\(
\frac{m_2}{M}=\left(\frac{r_2}{R}\right)^3 \Longrightarrow \frac{1}{8}=\left(\frac{r_2}{R}\right)^3
\)
Taking the cube root of both sides: \(r_2=\frac{R}{2}\).
Moment of Inertia \(\left(I_2\right)\) : For a solid sphere, \(I=\frac{2}{5} m r^2\).
\(
\begin{aligned}
I_2 & =\frac{2}{5}\left(\frac{M}{8}\right)\left(\frac{R}{2}\right)^2 \\
I_2 & =\frac{2}{5} \cdot \frac{M}{8} \cdot \frac{R^2}{4}=\frac{M R^2}{80}
\end{aligned}
\)
\(
\frac{I_1}{I_2}=\frac{\frac{7 M R^2}{4}}{\frac{M R^2}{80}}=140
\)
Q20. The time dependence of the position of a particle of mass \(m =2\) is given by \(\vec{r}(t)=2 t \hat{i}-3 t^2 \hat{j}\). Its angular momentum, with respect to the origin, at time \(t=2\) is [JEE Main 2019]
(a) \(36 \widehat{k}\)
(b) \(-48 \widehat{k}\)
(c) \(-34(\widehat{k}-\hat{i})\)
(d) \(48(\hat{i}+\hat{j})\)
Solution: (b) Step 1: Determine the velocity vector
The position vector is given by \(\vec{r}(t)=2 t \hat{i}-3 t^2 \hat{j}\). The velocity vector \(\vec{v}(t)\) is the first derivative of the position vector with respect to time:
\(
\vec{v}(t)=\frac{d \vec{r}}{d t}=\frac{d}{d t}(2 t) \hat{i}-\frac{d}{d t}\left(3 t^2\right) \hat{j}=2 \hat{i}-6 t \hat{j}
\)
Step 2: Determine the linear momentum vector
The linear momentum vector \(\vec{p}(t)\) is the product of the mass \(m =2\) and the velocity vector:
\(
\vec{p}(t)=m \vec{v}(t)=2(2 \hat{i}-6 t \hat{j})=4 \hat{i}-12 t \hat{j}
\)
Step 3: Evaluate position and momentum at \(t = 2\)
Substitute \(t=2\) into the expressions for \(\vec{r}(t)\) and \(\vec{p}(t)\) :
\(
\begin{aligned}
& \vec{r}(2)=2(2) \hat{i}-3\left(2^2\right) \hat{j}=4 \hat{i}-12 \hat{j} \\
& \vec{p}(2)=4 \hat{i}-12(2) \hat{j}=4 \hat{i}-24 \hat{j}
\end{aligned}
\)
Step 4: Calculate the angular momentum
The angular momentum \(\overrightarrow{ L }\) with respect to the origin is given by the cross product of the position vector and the linear momentum vector:
\(
\vec{L}=\vec{r} \times \vec{p}
\)
Using the component values at \(t=2\) :
\(
\vec{L}=(4 \hat{i}-12 \hat{j}) \times(4 \hat{i}-24 \hat{j})
\)
Expanding the cross product terms, knowing \(\hat{i} \times \hat{i}=0, \hat{j} \times \hat{j}=0, \hat{i} \times \hat{j}=\hat{k}\), and \(\hat{j} \times \hat{i}=-\hat{k}\) :
\(
\begin{gathered}
\vec{L}=4 \hat{i} \times 4 \hat{i}+4 \hat{i} \times(-24 \hat{j})+(-12 \hat{j}) \times 4 \hat{i}+(-12 \hat{j}) \times(-24 \hat{j}) \\
\vec{L}=0-96(\hat{i} \times \hat{j})-48(\hat{j} \times \hat{i})+0 \\
\vec{L}=-96 \hat{k}-48(-\hat{k}) \\
\vec{L}=-96 \hat{k}+48 \hat{k} \\
\vec{L}=-48 \hat{k}
\end{gathered}
\)
Q21. A thin disc of mass \(M\) and radius \(R\) has mass per unit area \(\sigma( r )= kr ^2\) where \(r\) is the distance from its centre. Its moment of inertia about an axis going through its centre of mass and perpendicular to its plane is : [JEE Main 2019]
(A) \(\frac{M R^2}{3}\)
(B) \(\frac{M R^2}{6}\)
(C) \(\frac{2 M R^2}{3}\)
(D) \(\frac{M R^2}{2}\)
Solution: (c) Step 1: Determine the constant \(k\) in terms of \(M\) and \(R\)
The total mass \(M\) is found by integrating the mass per unit area \(\sigma ( r )=k r ^2\) over the entire area of the disc using annular rings of area \(d A=2 \pi r d r\).
\(
M=\int_0^R \sigma(r) d A=\int_0^R k r^2(2 \pi r d r)=2 \pi k \int_0^R r^3 d r
\)
Evaluating the integral gives the expression for the total mass \(M\) :
\(
M=2 \pi k\left[\frac{r^4}{4}\right]_0^R=\frac{\pi k R^4}{2}
\)
Solving for the constant \(k\) yields:
\(
k=\frac{2 M}{\pi R^4}
\)
Step 2: Calculate the moment of inertia \(I\)
The moment of inertia \(I\) about an axis through the center and perpendicular to the plane is defined by \(I=\int r^2 d m\), where \(d m=\sigma(r) d A=2 \pi k r^3 d r\).
\(
I=\int_0^R r^2 d m=\int_0^R r^2\left(2 \pi k r^3 d r\right)=2 \pi k \int_0^R r^5 d r
\)
Evaluating the integral gives:
\(
I=2 \pi k\left[\frac{r^6}{6}\right]_0^R=\frac{\pi k R^6}{3}
\)
Step 3: Express \(I\) in terms of \(M\) and \(R\)
Substitute the expression for \(k=\frac{2 M}{\pi R^4}\) from Step 1 into the equation for \(I\) from Step 2:
\(
\begin{gathered}
I=\frac{\pi R^6}{3}\left(\frac{2 M}{\pi R^4}\right) \\
I=\frac{2 M R^6}{3 R^4}=\frac{2 M R^2}{3}
\end{gathered}
\)
Q22. Two coaxial discs, having moments of inertia \(I _1\) and \(I _1 / 2\), are rotating with respective angular velocities \(\omega_1\) and \(\omega_1 / 2\), about their common axis. They are brought in contact with each other and thereafter they rotate with a common angular velocity. If \(E _{ f }\) and \(E _{ i }\) are the final and initial total energies, then \(\left( E _{ f }- E _{ i }\right)\) is: [JEE Main 2019]
(A) \(\frac{I_1 \omega_1^2}{24}\)
(B) \(\frac{I_1 \omega_1^2}{12}\)
(C) \(\frac{3}{8} I_1 \omega_1^2\)
(D) \(\frac{I_1 \omega_1^2}{6}\)
Solution: (A) To solve this problem, we use the principle of Conservation of Angular Momentum, as there are no external torques acting on the system of two coaxial discs.
Step 1: Conservation of Angular Momentum
When the two discs are brought into contact, they eventually reach a common angular velocity, \(\omega_f\).
Initial Angular Momentum ( \(L_i\) ):
\(
L_i=I_1 \omega_1+I_2 \omega_2
\)
Given \(I_2=\frac{I_1}{2}\) and \(\omega_2=\frac{\omega_1}{2}\) :
\(
L_i=I_1 \omega_1+\left(\frac{I_1}{2}\right)\left(\frac{\omega_1}{2}\right)=I_1 \omega_1+\frac{I_1 \omega_1}{4}=\frac{5}{4} I_1 \omega_1
\)
Final Angular Momentum \(\left(L_f\right)\) :
\(
L_f=\left(I_1+I_2\right) \omega_f=\left(I_1+\frac{I_1}{2}\right) \omega_f=\frac{3}{2} I_1 \omega_f
\)
Equating \(L_i=L_f\) :
\(
\frac{5}{4} I_1 \omega_1=\frac{3}{2} I_1 \omega_f \Longrightarrow \omega_f=\left(\frac{5}{4}\right)\left(\frac{2}{3}\right) \omega_1=\frac{5}{6} \omega_1
\)
Step 2: Calculate Initial and Final Energies
Initial Kinetic Energy \(\left(E_i\right)\) :
\(
\begin{gathered}
E_i=\frac{1}{2} I_1 \omega_1^2+\frac{1}{2} I_2 \omega_2^2 \\
E_i=\frac{1}{2} I_1 \omega_1^2+\frac{1}{2}\left(\frac{I_1}{2}\right)\left(\frac{\omega_1}{2}\right)^2=\frac{1}{2} I_1 \omega_1^2+\frac{I_1 \omega_1^2}{16} \\
E_i=\frac{8+1}{16} I_1 \omega_1^2=\frac{9}{16} I_1 \omega_1^2
\end{gathered}
\)
Final Kinetic Energy \(\left(E_f\right)\) :
\(
\begin{gathered}
E_f=\frac{1}{2}\left(I_1+I_2\right) \omega_f^2=\frac{1}{2}\left(\frac{3}{2} I_1\right)\left(\frac{5}{6} \omega_1\right)^2 \\
E_f=\frac{3}{4} I_1\left(\frac{25}{36} \omega_1^2\right)=\frac{25}{48} I_1 \omega_1^2
\end{gathered}
\)
Step 3: Calculate the Change in Energy \(\left(E_f-E_i\right)\)
\(
\Delta E=E_f-E_i=\frac{25}{48} I_1 \omega_1^2-\frac{9}{16} I_1 \omega_1^2
\)
To subtract, use a common denominator of 48:
\(
\begin{gathered}
\Delta E=\frac{25}{48} I_1 \omega_1^2-\frac{27}{48} I_1 \omega_1^2 \\
\Delta E=-\frac{2}{48} I_1 \omega_1^2=-\frac{1}{24} I_1 \omega_1^2
\end{gathered}
\)
The question asks for the value of \(\left(E_f-E_i\right)\), which represents the energy lost (usually dissipated as heat due to friction between the discs).
The magnitude of the change is \(( A ) \frac{I_1 \omega_1^2}{24}\).
Q23. A particle of mass \(m\) is moving along a trajectory given by
\(
\begin{aligned}
& x=x_0+a \cos \omega_1 t \\
& y=y_0+b \sin \omega_2 t
\end{aligned}
\)
The torque, acting on the particle about the origin, at \(t=0\) is : [JEE Main 2019]
(A) Zero
(B) \(+ my _0 a \omega_1^2 \widehat{k}\)
(C) \(-m\left(x_0 b \omega_2^2-y_0 a \omega_1^2\right) \widehat{k}\)
(D) \(m \left(- x _0 b+ y _0 a \right) \omega_1^2 \widehat{k}\)
Solution: (B) To solve this problem quickly using a shortcut, we focus on the definition of torque ( \(\tau=r \times F\) ) and evaluate the components specifically at \(t=0\).
Shortcut Steps
Step 1: Find the Position Vector ( \(r\) ) at \(t=0\) :
\(x=x_0+a \cos (0)=x_0+a\)
\(y=y_0+b \sin (0)=y_0\)
\(r=\left(x_0+a\right) \hat{i}+y_0 \hat{j}\)
Step 2: Find the Force Vector \((F)\) at \(t=0\) : The force is \(F=m a\). Acceleration is the second derivative of position:
\(a_x=\frac{d^2 x}{d t^2}=-a \omega_1^2 \cos \left(\omega_1 t\right) \xrightarrow{t=0}-a \omega_1^2\)
\(a_y=\frac{d^2 y}{d t^2}=-b \omega_2^2 \sin \left(\omega_2 t\right) \xrightarrow{t=0} 0\)
Therefore, at \(t=0\), the force acts only in the negative \(x\)-direction: \(F=-m a \omega_1^2 \hat{i}\).
Step 3: Compute Torque ( \(\tau\) ):
\(
\begin{gathered}
\tau=r \times F \\
\tau=\left[\left(x_0+a\right) \hat{i}+y_0 \hat{j}\right] \times\left[-m a \omega_1^2 \hat{i}\right]
\end{gathered}
\)
Since \(\hat{i} \times \hat{i}=0\), only the \(\hat{j}\) component of position contributes to the torque:
\(
\begin{aligned}
\tau & =\left(y_0 \hat{j}\right) \times\left(-\operatorname{ma}_1^2 \hat{i}\right) \\
\tau & =-m y_0 a \omega_1^2(\hat{j} \times \hat{i})
\end{aligned}
\)
Using the cyclic rule \(\hat{j} \times \hat{i}=-\hat{k}\) :
\(
\tau=-m y_0 \alpha \omega_1^2(-\hat{k})=+m y_0 a \omega_1^2 \hat{k}
\)
Q24. Moment of inertia of a body about a given axis is \(1.5 kg m ^2\). Initially the body is at rest. In order to produce a rotational kinetic energy of 1200 J , the angular accleration of \(20 rad / s ^2\) must be applied about the axis for a duration of : [JEE Main 2019]
(A) 2.5 s
(B) 3 s
(C) 5 s
(D) 2 s
Solution: (D) Step 1: Calculate final angular velocity
We relate the final rotational kinetic energy ( \(K E _{\text {rot }}\) ) to the moment of inertia ( \(I\) ) and final angular velocity \((\omega)\) using the formula \(K E_{\text {rot }}=\frac{1}{2} I \omega^2\).
We solve for \(\omega\) :
\(
\begin{gathered}
\omega=\sqrt{\frac{2 \cdot K E_{\text {rot }}}{I}} \\
\omega=\sqrt{\frac{2 \cdot 1200 J}{1.5 kg m^2}} \\
\omega=\sqrt{1600 rad^2 / s^2} \\
\omega=40 rad / s
\end{gathered}
\)
Step 2: Calculate the duration
We use the kinematic equation relating final angular velocity ( \(\omega\) ), initial angular velocity \(\left(\omega_0\right)\), angular acceleration \((\alpha)\), and time \((t): \omega=\omega_0+\alpha t\).
Given that the body starts from rest ( \(\omega_0=0\) ), we solve for \(t\) :
\(
\begin{gathered}
t=\frac{\omega}{\alpha} \\
t=\frac{40 rad / s}{20 rad / s^2} \\
t=2 s
\end{gathered}
\)
Q25. A thin smooth rod of length \(L\) and mass \(M\) is rotating freely with angular speed \(\omega_0\) about an axis perpendicular to the rod and passing through its center. Two beads of mass \(m\) and negligible size are at the center of the rod initially. The beads are free to slide along the rod. The angular speed of the system , when the beads reach the opposite ends of the rod, will be : [JEE Main 2019]
(A) \(\frac{M \omega_0}{M+3 m}\)
(B) \(\frac{M \omega_0}{M+m}\)
(C) \(\frac{M \omega_0}{M+6 m}\)
(D) \(\frac{M \omega_0}{M+2 m}\)
Solution: (C) Step 1: Calculate initial moment of inertia and angular momentum
The initial moment of inertia \(I _{ i }\) is solely due to the rod, as the beads are at the center ( \(r=0\) ). The moment of inertia for a rod rotated about its center is \(I_{\text {rod }}=\frac{1}{12} M L^2\).
\(
I_i=I_{r o d}+I_{b e a d s, i}=\frac{1}{12} M L^2+2 m(0)^2=\frac{1}{12} M L^2
\)
The initial angular momentum \(L_i\) is:
\(
L_i=I_i \omega_0=\frac{1}{12} M L^2 \omega_0
\)
Step 2: Calculate final moment of inertia
When the beads reach the ends, each is at a distance \(L / 2\) from the center. The final moment of inertia \(I _f\) is the sum of the rod’s moment of inertia and the beads’ moment of inertia at their final positions.
\(
\begin{gathered}
I_f=I_{r o d}+I_{b e a d s, f}=\frac{1}{12} M L^2+2 m\left(\frac{L}{2}\right)^2=\frac{1}{12} M L^2+\frac{1}{2} m L^2 \\
I_f=\left(\frac{M+6 m}{12}\right) L^2
\end{gathered}
\)
Step 3: Apply conservation of angular momentum
Since there are no external torques acting on the system, the angular momentum is conserved, so \(L_i=L_f\). Let the final angular speed be \(\omega_f\).
\(
L_f=I_f \omega_f=\left(\frac{M+6 m}{12}\right) L^2 \omega_f
\)
Equating the initial and final angular momenta:
\(
\frac{1}{12} M L^2 \omega_0=\left(\frac{M+6 m}{12}\right) L^2 \omega_f
\)
Solving for \(\omega_f\) :
\(
\begin{gathered}
M \omega_0=( M +6 m) \omega_f \\
\omega_f=\frac{ M \omega_0}{ M +6 m}
\end{gathered}
\)
Q26. The following bodies are made to roll up (without slipping) the same inclined plane from a horizontal plane.: (i) a ring of radius \(R\), (ii) a solid cylinder of radius \(R / 2\) and (iii) a solid sphere of radius \(R / 4\). If in each case, the speed of the centre of mass at the bottom of the incline is same, the ratio of the maximum heights they climb is : [JEE Main 2019]
(A) \(20: 15: 14\)
(B) \(4: 3: 2\)
(C) \(2: 3: 4\)
(D) \(10 : 15 : 7\)
Solution: (A) To determine the ratio of the maximum heights climbed by these bodies, we use the Principle of Conservation of Energy. As each body rolls up the incline without slipping, its initial total kinetic energy at the bottom is converted entirely into gravitational potential energy at the maximum height.
Step 1: The Energy Equation
The total kinetic energy ( \(K\) ) of a rolling body is the sum of its translational and rotational kinetic energies:
\(
K=\frac{1}{2} m v^2+\frac{1}{2} I \omega^2
\)
For rolling without slipping, \(\omega=v / r\). We can express the moment of inertia as \(I=m k^2\), where \(k\) is the radius of gyration. The equation becomes:
\(
K=\frac{1}{2} m v^2\left(1+\frac{k^2}{r^2}\right)
\)
At the maximum height ( \(h\) ), this energy equals the potential energy ( \(m g h\) ):
\(
m g h=\frac{1}{2} m v^2\left(1+\frac{k^2}{r^2}\right) \Longrightarrow h=\frac{v^2}{2 g}\left(1+\frac{k^2}{r^2}\right)
\)
Since the initial speed ( \(v\) ) is the same for all three bodies, the maximum height \(h\) is directly proportional to the factor \(\left(1+\frac{k^2}{r^2}\right)\). Note that the actual radius \((R, R / 2, R / 4)\) does not affect the height; only the shape (the ratio \(k^2 / r^2\) ) matters.
Step 2: Calculate the Height Factor for Each Body
We calculate \(\beta=\left(1+\frac{k^2}{r^2}\right)\) for each case:
Body (i): Ring
\(I=m r^2 \Longrightarrow \frac{k^2}{r^2}=1\)
\(\beta_1=1+1=2\)
Body (ii): Solid Cylinder
\(I=\frac{1}{2} m r^2 \Longrightarrow \frac{k^2}{r^2}=\frac{1}{2}\)
\(\beta_2=1+\frac{1}{2}=\frac{3}{2}\)
Body (iii): Solid Sphere
\(I=\frac{2}{5} m r^2 \Longrightarrow \frac{k^2}{r^2}=\frac{2}{5}\)
\(\beta_3=1+\frac{2}{5}=\frac{7}{5}\)
Step 3: Determine the Ratio
The ratio of the heights \(h_1: h_2: h_3\) is equal to the ratio of their \(\beta\) factors:
\(
h_1: h_2: h_3=2: \frac{3}{2}: \frac{7}{5}
\)
To simplify this into integers, multiply the entire ratio by the least common multiple of the denominators (which is 10):
\(
\begin{gathered}
h_1: h_2: h_3=(2 \times 10):\left(\frac{3}{2} \times 10\right):\left(\frac{7}{5} \times 10\right) \\
h_1: h_2: h_3=20: 15: 14
\end{gathered}
\)
Q27. A stationary horizontal disc is free to rotate about its axis. When a torque is applied on it, its kinetic energy as a function of \(\theta\), where \(\theta\) is the angle by which it has rotated, is given as \(k \theta^2\). If its moment of inertia is \(I\) then the angular acceleration of the disc is : [JEE Main 2019]
(A) \(\frac{k}{4 I} \theta\)
(B) \(\frac{k}{I} \theta\)
(C) \(\frac{k}{2 I} \theta\)
(D) \(\frac{2 k}{I} \theta\)
Solution: (D) Step 1: Calculate the torque
The work done on the disc is equal to the change in kinetic energy, \(W=\Delta K E=k \theta^2-0=k \theta^2\).
The torque \((\tau)\) is the derivative of work with respect to angular displacement \(( \theta )\) :
\(
\tau=\frac{d W}{d \theta}=\frac{d}{d \theta}\left(k \theta^2\right)=2 k \theta
\)
Step 2: Determine angular acceleration
According to Newton’s second law for rotation, torque is related to the moment of inertia ( \(I\) ) and angular acceleration ( \(\alpha\) ) by the formula \(\tau=I \alpha\).
We can solve for the angular acceleration \(\alpha\) using the torque derived in Step 1:
\(
\alpha=\frac{\tau}{I}=\frac{2 k \theta}{I}
\)
Q28. An electric dipole is formed by two equal and opposite charges \(q\) with separation \(d\). The charges have same mass \(m\). It is kept in a uniform electric field \(E\) . If it is slightly rotated from its equilibrium orientation, then its angular frequency \(\omega\) is : [JEE Main 2019]
(A) \(\sqrt{\frac{q E}{m d}}\)
(B) \(\sqrt{\frac{q E}{2 m d}}\)
(c) \(\sqrt{\frac{q E}{-2 m d}}\)
(D) \(\sqrt{\frac{2 q E}{m d}}\)
Solution: (D)
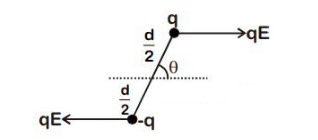
Moment of Inertia ( \(I\) ): Since the dipole rotates about its center of mass (the midpoint), each mass \(m\) is at a distance of \(d / 2\) from the axis.
\(
I=\sum m r^2=m\left(\frac{d}{2}\right)^2+m\left(\frac{d}{2}\right)^2=\frac{m d^2}{2}
\)
Restoring Torque ( \(\tau\) ): The torque on a dipole in an electric field is \(\tau=p \times E\). In terms of magnitude and the restoring nature of the force:
\(
\tau=-(q E \cdot d) \sin \theta
\)
Equation of Motion: You equated the torque to \(I \alpha\) :
\(
-(q d E) \sin \theta=\frac{m d^2}{2} \alpha
\)
Small Angle Approximation: For small oscillations, \(\sin \theta \approx \theta\). This leads to the standard form for Simple Harmonic Motion \(\left(\alpha=-\omega^2 \theta\right)\) :
\(
\alpha=-\left(\frac{2 q E}{m d}\right) \theta
\)
By comparing this to the SHM definition, the angular frequency is indeed:
\(
\omega=\sqrt{\frac{2 q E}{m d}}
\)
Q29. A solid sphere and solid cylinder of identical radii approach an incline with the same linear velocity (see figure). Both roll without slipping all throughout. The two climb maximum heights \(h _{\text {sph }}\) and \(h _{\text {cyl }}\) on the incline. The ratio \(h _{\text {sph }} / h _{\text {cyl }}\) is given by : [JEE Main 2019]
Solution: Step 1: Apply Conservation of Energy
For both objects rolling without slipping up the incline, the initial total kinetic energy (translational plus rotational) is converted entirely into gravitational potential energy at the maximum height [1]. The conservation of energy equation is
\(
\frac{1}{2} m v^2+\frac{1}{2} I \omega^2=m g h .
\)
Using the condition for rolling without slipping \(\omega=v / R\), the height \(h\) reached can be expressed as:
\(
h=\frac{v^2}{2 g}\left(1+\frac{I}{m R^2}\right)
\)
The term \(\frac{ I }{ m R ^2}\) is the moment of inertia factor for the specific shape.
Step 2: Determine Heights for Sphere and Cylinder
The moment of inertia for a solid sphere is \(I _{ sph }=\frac{2}{5} m R ^2\), and for a solid cylinder it is \(I _{\text {cyl }}=\frac{ 1 }{ 2 } m R ^{ 2 }[1]\).
For the sphere:
\(
h_{sph}=\frac{v^2}{2 g}\left(1+\frac{2}{5}\right)=\frac{v^2}{2 g}\left(\frac{7}{5}\right)
\)
For the cylinder:
\(
h_{cyl}=\frac{v^2}{2 g}\left(1+\frac{1}{2}\right)=\frac{v^2}{2 g}\left(\frac{3}{2}\right)
\)
Step 3: Calculate the Ratio
The ratio \(\frac{h_{ sph }}{h_{ cyl }}\) is calculated by dividing the expression for \(h_{ sph }\) by the expression for \(h_{\text {cyl }}\) :
\(
\frac{h_{sph}}{h_{cyl}}=\frac{\frac{v^2}{2 g}\left(\frac{7}{5}\right)}{\frac{v^2}{2 g}\left(\frac{3}{2}\right)}=\frac{7 / 5}{3 / 2}=\frac{7}{5} \times \frac{2}{3}=\frac{14}{15}
\)
Q30. A rectangular solid box of length 0.3 m is held horizontally, with one of its sides on the edge of a platform of height 5 m . When released, it slips off the table in a very short time \(t=0.01 s\), remaining essentially horizontal. The angle by which it would rotate when it hits the ground will be (in radians) close to : [JEE Main 2019]
Solution: To find the angle by which the rectangular box rotates before hitting the ground, we must analyze the impulsive torque acting on it during the short time it slips off the platform.
Step 1: Angular Impulse and Torque
As the box slips off the edge, the normal force from the edge acts at one end of the box. The weight \(M g\) acts at the center of mass, a distance \(l / 2\) from the edge. The average torque ( \(\tau\) ) about the center of mass during the slipping time \(t\) is:
\(
\tau=N \times \frac{l}{2}
\)
Since the box slips off in a very short time \(t\), we consider the impulsive torque:
\(
\int \tau d t=I \omega
\)
Assuming the normal force \(N \approx M g\) during this brief interval:
\(
M g\left(\frac{l}{2}\right) t=I \omega
\)
Step 2: Find the Angular Velocity ( \(\omega\) )
For a rectangular solid box of length \(l\), the moment of inertia about its center of mass is \(I= \frac{1}{12} M l^2\).
\(
\begin{aligned}
M g \frac{l}{2} t & =\left(\frac{1}{12} M l^2\right) \omega \\
g \frac{t}{2} & =\frac{l}{12} \omega \\
\omega & =\frac{6 g t}{l}
\end{aligned}
\)
Given values:
\(g \approx 10 m / s ^2\)
\(t=0.01 s\)
\(l=0.3 m\)
\(
\omega=\frac{6 \times 10 \times 0.01}{0.3}=\frac{0.6}{0.3}=2 rad / s
\)
Step 3: Find Time of Flight ( \(T\) )
The box remains essentially horizontal while slipping, so it effectively undergoes free fall from height \(h=5 m\) :
\(
\begin{gathered}
h=\frac{1}{2} g T^2 \Longrightarrow 5=\frac{1}{2}(10) T^2 \\
T^2=1 \Longrightarrow T=1 s
\end{gathered}
\)
Step 4: Calculate the Rotation Angle ( \(\theta\) )
Once the box is in the air, it rotates at a constant angular velocity \(\omega\) :
\(
\theta=\omega \times T
\)
\(
\theta=2 rad / s \times 1 s=0.5 rad
\)
Q31. A thin circular plate of mass \(M\) and radius \(R\) has its density varying as \(\rho(r)=\rho_0 r\) with \(\rho_0\) as constant and \(r\) is the distance from its centre. The moment of Inertia of the circular plate about an axis perpendicular to the plate and passing through its edge is \(I = aMR ^2\). The value of the coefficient \(a\) is : [JEE Main 2019]
(A) \(\frac{1}{2}\)
(B) \(\frac{3}{2}\)
(C) \(\frac{8}{5}\)
(D) \(\frac{3}{5}\)
Solution: (C) To find the value of the coefficient \(a\), we must first determine the total mass \(M\) of the plate and its moment of inertia about the center, then use the parallel axis theorem.
Step 1: Calculate the Total Mass ( \(M\) )
The density varies with the distance from the center as \(\rho(r)=\rho_0 r\). We consider a small elemental ring of radius \(r\) and thickness \(d r\).
Area of the ring: \(d A=2 \pi r d r\)
Mass of the ring: \(d m=\rho(r) d A=\left(\rho_0 r\right)(2 \pi r d r)=2 \pi \rho_0 r^2 d r\)
Integrating from \(r=0\) to \(r=R\) to find the total mass:
\(
M=\int_0^R 2 \pi \rho_0 r^2 d r=2 \pi \rho_0\left[\frac{r^3}{3}\right]_0^R=\frac{2}{3} \pi \rho_0 R^3
\)
From this, we can write \(2 \pi \rho_0=\frac{3 M}{R^3}\).
Step 2: Calculate Moment of Inertia about the Center ( \(I_{c m}\) )
The moment of inertia of the elemental ring about the central axis is \(dI =r^2 dm\).
\(
d I=r^2\left(2 \pi \rho_0 r^2 d r\right)=2 \pi \rho_0 r^4 d r
\)
Integrating to find \(I_{c m}\) :
\(
I_{c m}=\int_0^R 2 \pi \rho_0 r^4 d r=2 \pi \rho_0\left[\frac{r^5}{5}\right]_0^R=\frac{2}{5} \pi \rho_0 R^5
\)
Substitute the expression for \(2 \pi \rho_0\) from step 1:
\(
I_{c m}=\left(\frac{3 M}{R^3}\right) \frac{R^5}{5}=\frac{3}{5} M R^2
\)
Step 3: Calculate Moment of Inertia about the Edge ( \(I_{\text {edge }}\) )
According to the Parallel Axis Theorem, the moment of inertia about an axis through the edge is:
\(
I=I_{c m}+M d^2
\)
Where \(d=R\) (the distance from the center to the edge).
\(
I=\frac{3}{5} M R^2+M(R)^2=\left(\frac{3}{5}+1\right) M R^2=\frac{8}{5} M R^2
\)
Step 4: Determine the Coefficient (\(a\))
Comparing \(I=\frac{8}{5} M R^2\) with the given form \(I=a M R^2\) :
\(
a=\frac{8}{5}
\)
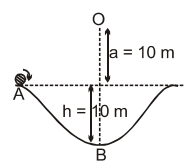
Q32. A particle of mass 20 g is released with an initial velocity \(5 m / s\) along the curve from the point A, as shown in the figure. The point \(A\) is at height \(h\) from point \(B\). The particle slides along the frictionless surface. when the particle reaches point \(b\), its angular momentum about O will be :
(Take \(g =10 m / s ^2\) ) [JEE Main 2019]
(A) \(6 kg- m ^2 / s\)
(B) \(8 kg- m ^2 / s\)
(C) \(2 kg- m ^2 / s\)
(D) \(3 kg- m ^2 / s\)
Solution: (A) To find the angular momentum of the particle at point \(B\) about point \(O\), we need to determine the velocity of the particle at \(B[latex] and the perpendicular distance from [latex]O\) to the line of motion.
Step 1: Find the Velocity at Point \(B\)
Since the surface is frictionless, we can use the Law of Conservation of Mechanical Energy between points \(A\) and \(B\).
Given:
Mass \(m=20 g=0.02 kg\)
Initial velocity at \(A v_A=5 m / s\)
Height \(h=10 m\)
Acceleration due to gravity \(g=10 m / s ^2\)
Energy Equation:
\(
E_A=E_B
\)
\(
\frac{1}{2} m v_A^2+m g h=\frac{1}{2} m v_B^2
\)
Dividing by \(m\) and rearranging for \(v_B\) :
\(
\begin{gathered}
v_B=\sqrt{v_A^2+2 g h} \\
v_B=\sqrt{5^2+2(10)(10)}=\sqrt{25+200}=\sqrt{225} \\
v_B=15 m / s
\end{gathered}
\)
Step 2: Find the Angular Momentum about \(O\)
The angular momentum \(L\) of a particle about a point is given by:
\(
L=m(r \times v)=m v r_{\perp}
\)
Where \(r_{\perp}\) is the perpendicular distance from the reference point \(O\) to the line of velocity at point \(B\).
From the diagram for this problem:
The particle at point \(B\) is moving horizontally.
The point \(O\) is located at a vertical distance of ( \(a+h\) ) or simply 20 m (where \(a=10 m\) and \(h=10 m\) ) from the line of motion.
Calculation:
\(m=0.02 kg\)
\(v_B=15 m / s\)
\(r_{\perp}=20 m\)
\(
\begin{gathered}
L=0.02 \times 15 \times 20 \\
L=0.3 \times 20 \\
L=6 kg \cdot m^2 / s
\end{gathered}
\)
The angular momentum of the particle about point O is \(6 kg \cdot m ^2 / s\).
Q33. Two particles \(A, B\) are moving on two concentric circles of radii \(R_1\) and \(R_2\) with equal angular speed \(\omega\). At \(t=0\), their positions and direction of motion are shown in the figure. : [JEE Main 2019]
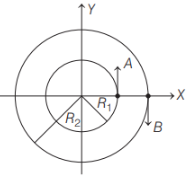
The relative velocity \(\vec{V}_A-\vec{V}_B\) at \(t =\frac{\pi}{2 \omega}\) is given by :
(A) \(-\omega\left(R_1+R_2\right) \hat{i}\)
(B) \(\omega\left(R_2-R_1\right) \hat{i}\)
(C) \(\omega\left(R_1+R_2\right) \hat{i}\)
(D) \(\omega\left(R_1-R_1\right) \hat{i}\)
Solution: We need to find the relative velocity \(v_A-v_B\) at a specific time \(t=\frac{\pi}{2 \omega}\).
Determine the positions and velocities at \(t=\frac{\pi}{2 \omega}\):
The particles have equal angular speed \(\omega\). The time duration is \(t=\frac{\pi}{2 \omega}\). The angle covered by each particle is \(\theta=\omega t=\omega \times \frac{\pi}{2 \omega}=\frac{\pi}{2}\) radians, or \(90^{\circ}\).
So, positions of particles at \(t =\frac{\pi}{2 \omega}\) is as shown below:
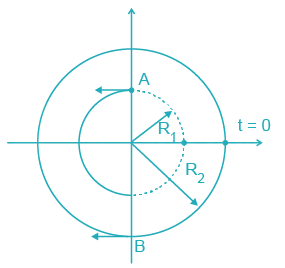
Velocities of particles at \(t =\frac{\pi}{2 \omega}\) are \(v _{ A }=-\omega R _1 \hat{i}\) and \(v _{ B }=-\omega R _2 \hat{i}\)
The relative velocity of particles is \(v _{ A }- v _{ B }=-\omega R \hat{i}-\left(-\omega R _2 \hat{i}\right)\)
\(
=-\omega\left(R_1-R_2\right) \hat{i}=\omega\left(R_2-R_1\right) \hat{i}
\)
Q34. The moment of inertia of a solid sphere, about an axis parallel to its diameter and at a distance of x from it, is ‘ \(I ( x )\) ‘. Which one of the graphs represents the variation of \(I ( x )\) with \(x\) correctly? [JEE Main 2019]
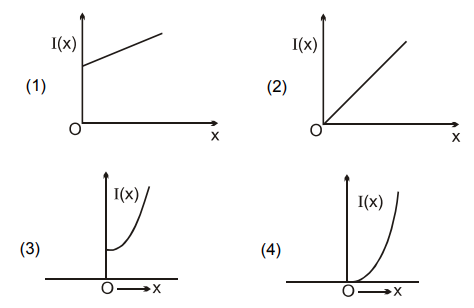
Solution: (3) Step 1: Apply the parallel axis theorem
The moment of inertia \(I ( x )\) about an axis parallel to the diameter at a distance \(x\) is given by the parallel axis theorem:
\(
I(x)=I_{C M}+M x^2
\)
where \(I _{ C M }\) is the moment of inertia about the parallel axis passing through the center of mass, \(M\) is the mass of the sphere, and \(x\) is the perpendicular distance between the two axes.
Step 2: Substitute the moment of inertia about the center of mass
For a solid sphere of mass \(M\) and radius \(R\), the moment of inertia about an axis through its diameter (center of mass) is a constant:
\(
I_{C M}=\frac{2}{5} M R^2
\)
Substituting this into the equation from Step 1 gives the final expression for \(I ( x )\) :
\(
I(x)=\frac{2}{5} M R^2+M x^2
\)
Step 3: Analyze the equation
The equation for \(I(x)\) is in the form of a quadratic function \(y=c+a x^2\), where \(y = I ( x ), c =\frac{2}{5} M R ^2\) (a positive constant), and \(a = M\) (a positive constant).
This equation represents a parabola opening upwards. The graph is symmetric about the \(I (x)\) axis and does not pass through the origin; instead, it intersects the \(I (x)\) axis at the positive value of \(I_{C M}\) when \(x=0\).
The graph representing the variation of \(I(x)\) with \(x\) is a parabola symmetric about the \(I(x)\) axis ( \(y\)-axis) with its vertex at \(\left(0, \frac{2}{5} M R^2\right)\).
Q35. Let the moment of inertia of a hollow cylinder of length 30 cm (inner radius 10 cm and outer radius 20 cm ), about its axis be \(I\). The radius of a thin cylinder of the same mass such that its moment of inertia about its axis is also \(I\) , is : [JEE Main 2019]
(A) 16 cm
(B) 12 cm
(C) 14 cm
(D) 18 cm
Solution: (A) To solve this problem, we compare the moment of inertia of a thick hollow cylinder with that of a thin cylindrical shell (often referred to as a “thin cylinder”).
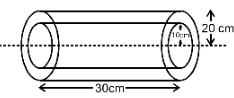
Step 1: Moment of Inertia of a Thick Hollow Cylinder
The moment of inertia ( \(I\) ) of a hollow cylinder of mass \(M\), inner radius \(R_1\), and outer radius \(R_2\) about its geometric axis is given by:
\(
I=\frac{1}{2} M\left(R_1^2+R_2^2\right)
\)
Given:
Inner radius \(R_1=10 cm\)
Outer radius \(R_2=20 cm\)
Substituting these values into the formula:
\(
I=\frac{1}{2} M\left(10^2+20^2\right)= 250 M
\)
Step 2: Moment of Inertia of a Thin Cylinder
A “thin cylinder” is essentially a cylindrical shell where all the mass is concentrated at a distance \(R\) from the axis. Its moment of inertia is:
\(
I^{\prime}=M R^2
\)
Step 3: Finding the Radius ( \(R\) )
According to the problem, the thin cylinder has the same mass \(M\) and the same moment of inertia \(I\). Therefore, \(I^{\prime}=I\) :
\(
\begin{gathered}
M R^2=250 M \\
R^2=250 \\
R=\sqrt{250} \\
R \approx 16 cm
\end{gathered}
\)
Q36. The magnitude of torque on a particle of mass 1 kg is 2.5 Nm about the origin. If the force acting on it is 1 N, and the distance of the particle from the origin is 5 m, the angle between the force and the position vector is (in radians) : [JEE Main 2019]
(A) \(\frac{\pi}{8}\)
(B) \(\frac{\pi}{6}\)
(C) \(\frac{\pi}{4}\)
(D) \(\frac{\pi}{3}\)
Solution: (B)
\(
\begin{aligned}
& \tau=\text { force } \times \perp \text { distance } \\
& 2.5=1 \times 5 \times \sin \theta \\
& \sin \theta=\frac{1}{2}=\sin \frac{\pi}{6} \\
& \theta=\frac{\pi}{6}
\end{aligned}
\)
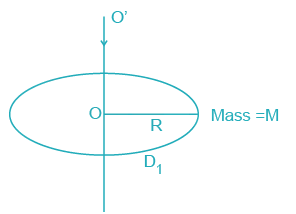
Q37. A circular disc \(D_1\) of mass \(M\) and radius \(R\) has two identical discs \(D_2\) and \(D_3\) of the same mass \(M\) and radius \(R\) attached rigidly at its opposite ends (see figure). The moment of inertia of the system about the axis \(00^{\prime}\),passing through the centre of \(D_1\) as shown in the figure, will be : [JEE Main 2019]
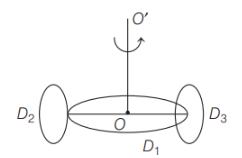
(A) \(3 M R^2\)
(B) \(MR ^2\)
(C) \(\frac{2}{3} M R^2\)
(D) \(\frac{4}{5} M R^2\)
Solution: (A) For disc \(D _1\), moment of inertia across axis \(OO ^{\prime}\) will be
\(
I_1=\frac{1}{2} M R^2
\)
For discs \(D _2\) and \(D _3, OO ^{\prime}\) is an axis parallel to the diameter of disc. Using parallel axis theorem,
\(
I_2=I_3=I_{\text {diameter }}+Md^2
\)
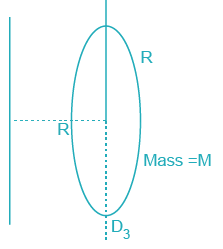
Here, \(I _{\text {diameter }}=\frac{1}{4} MR ^2\)
and \(d = R\)
\(
\therefore I_2=I_3=\frac{1}{4} MR^2+MR^2=\frac{5}{4} MR^2
\)
Now, total MI of the system
\(
\begin{aligned}
& I=I_1+I_2+I_3=\frac{1}{2} MR^2+2 \times \frac{5}{4} MR^2 \\
& =3 MR^2
\end{aligned}
\)
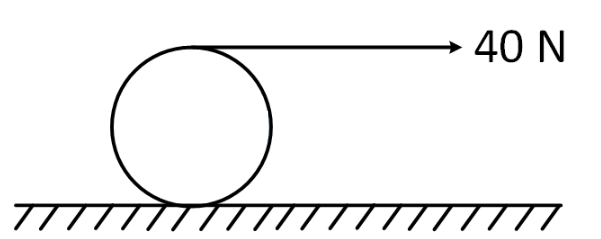
Q38. A string is wound around a hollow cylinder of mass 5 kg and radius 0.5 m . If the string is now pulled with a horizontal force of 40 N , and the cylinder is rolling without slipping on a horizontal surface (see figure), then the angular acceleration of the cylinder will be (Neglect the mass and thickness of the string) : [JEE Main 2019]
(A) \(16 rad / s ^2\)
(B) \(20 rad / s ^2\)
(C) \(10 rad / s ^2\)
(D) \(12 rad / s ^2\)
Solution: (A) To find the angular acceleration of the hollow cylinder, we must analyze both the translational and rotational motion, keeping in mind the condition for rolling without slipping.
Step 1: Given Data
Mass of hollow cylinder \((M)=5 kg\)
Radius \((R)=0.5 m\)
Applied horizontal force \(\left(F^{\prime}\right)=40 N\)
Moment of Inertia of a hollow cylinder \((I)=M R^2\)
Step 2: Equations of Motion
Let \(a\) be the linear acceleration of the center of mass and \(\alpha\) be the angular acceleration. Let \(f\) be the force of friction acting at the contact point.
Translational Motion ( \(F_{\text {net }}=M a\) ): The applied force \(F\) and friction \(f\) both act on the cylinder. Assuming friction acts in the direction of motion (to oppose the slipping caused by torque):
\(
F+f=M a \dots(1)
\)
Rotational Motion \(\left(\tau_{\text {net }}=I \alpha\right)\) : Torque is calculated about the center of mass. The applied force \(F\) at the top provides a clockwise torque, while friction \(f\) at the bottom provides a counter-clockwise torque:
\(
F(R)-f(R)=I \alpha
\)
Since \(I=M R^2\) :
\(
\begin{gathered}
R(F-f)=\left(M R^2\right) \alpha \\
F-f=M R \alpha \dots(2)
\end{gathered}
\)
Step 3: Rolling Without Slipping Condition
For pure rolling, the acceleration of the center of mass is related to angular acceleration by:
\(
a=R \alpha
\)
Step 4: Solving for Angular Acceleration ( \(\alpha\) )
Add (Eq. 1) and (Eq. 2) to eliminate friction \(f\) :
\(
\begin{gathered}
(F+f)+(F-f)=M a+M R \alpha \\
2 F=M(R \alpha)+M R \alpha \\
2 F=2 M R \alpha
\end{gathered}
\)
Dividing both sides by \(2 M R\) :
\(
\alpha=\frac{F}{M R}
\)
\(
\begin{gathered}
\alpha=\frac{40}{5 \times 0.5} \\
\alpha=\frac{40}{2.5} \\
\alpha=16 rad / s^2
\end{gathered}
\)
Q39. A slab is subjected to two forces \(\overrightarrow{F_1}\) and \(\overrightarrow{F_2}\) of same magnitude F as shown in the figure. Force \(\overrightarrow{F_2}\) is in XY -plane while force \(\overrightarrow{F_1}\) acts along \(z =\) axis at the point \((2 \vec{i}+3 \vec{j})\). The moment of these forces about point O will be : [JEE Main 2019]
(A) \((3 \hat{i}+2 \hat{j}-3 \hat{k}) F\)
(B) \((3 \hat{i}-2 \hat{j}+3 \hat{k}) F\)
(C) \((3 \hat{i}-2 \hat{j}-3 \hat{k}) F\)
(D) \((3 \hat{i}+2 \hat{j}+3 \hat{k}) F\)
Solution: (D) According to the question as shown in the figure below,
\(
\begin{aligned}
& r_1=2 \hat{i}+3 \hat{j} \text { and } r_2=6 \hat{j} \\
& F_1=F \hat{k} \\
& F_2=\left(-\sin 30^{\circ} \hat{i}-\cos 30^{\circ} \hat{j}\right) F
\end{aligned}
\)
Moment of force is given as,
\(
\tau=r \times F
\)
∴ Moment due to \(F _1\)
\(
\begin{aligned}
& \tau_1=(2 \hat{i}+3 \hat{j}) \times(F \hat{k}) \\
& \tau_1=-2 F \hat{j}+3 F \hat{i} \dots(1)
\end{aligned}
\)
Moment due to \(F_2\)
\(
\begin{aligned}
& \tau_2=(6 \hat{j}) \times\left(-\sin 30^{\circ} \hat{i}-\cos 30^{\circ} \hat{j}\right) F \\
& \tau_2=6 \sin 30^{\circ} F \hat{k} \\
& \tau_2=3 F \hat{k} \dots(2)
\end{aligned}
\)
∴ Resultant torque,
\(
\begin{aligned}
& \tau=\tau_1+\tau_2=3 F \hat{i}-2 F \hat{j}+3 F \hat{k} \\
& \tau=(3 \hat{i}-2 \hat{j}+3 \hat{k}) F
\end{aligned}
\)
Therefore, the moment of these forces about point \(O\) will be \((3 \hat{i}-2 \hat{j}+3 \hat{k}) F\)
Q40. An equilateral triangle \(A B C\) is cut from a thin solid sheet of wood. (see figure) \(D, E\) and \(F\) are the mid-points of its sides as shown and \(G\) is the centre of the triangle. The moment of inertia of the triangle about an axis passing through G and perpendicular to the plane of the triangle is \(I_0\) . If the smaller triangle DEF is removed from \(A B C\), the moment of inertia of the remaining figure about the same axis is \(I\). then : [JEE Main 2019]
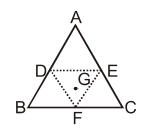
Solution: Step 1: Mass and Area Relationship
Since the sheet of wood is uniform, the mass \((M)\) is proportional to the area \((A)\).
Let the side length of the larger triangle \(A B C\) be \(a\) and its mass be \(M_0\).
The smaller triangle \(D E F\) is formed by joining the midpoints. Its side length is \(a / 2\).
The area of \(D E F\) is \(\left(\frac{1}{2}\right)^2=\frac{1}{4}\) of the area of \(A B C\).
Therefore, the mass of the removed triangle \(D E F\) is \(m=\frac{M_0}{4}\).
Step 2: Scaling the Moment of Inertia
The moment of inertia \(I\) for a planar object about its centroidal axis perpendicular to the plane follows the general form:
\(
I=k \cdot M \cdot a^2
\)
where \(k\) is a constant depending on the shape.
For the large triangle \(A B C\) :
\(
I_{A B C}=I_0=k \cdot M_0 \cdot a^2
\)
For the small triangle \(D E F\) : The centroid of \(D E F\) is the same point \(G\). Its mass is \(M_0 / 4\) and its side length is \(a / 2\).
\(
\begin{gathered}
I_{D E F}=k \cdot\left(\frac{M_0}{4}\right) \cdot\left(\frac{a}{2}\right)^2 \\
I_{D E F}=k \cdot \frac{M_0}{4} \cdot \frac{a^2}{4}=\frac{1}{16}\left(k \cdot M_0 \cdot a^2\right) \\
I_{D E F}=\frac{I_0}{16}
\end{gathered}
\)
Step 3: Calculating the Remaining Moment of Inertia
The moment of inertia is an additive property. If we remove a part, we subtract its moment of inertia about the same axis.
\(
\begin{aligned}
&\text { Since both triangles share the same centroid } G \text { : }\\
&\begin{gathered}
I_{\text {remaining }}=I_{A B C}-I_{D E F} \\
I=I_0-\frac{I_0}{16} \\
I=\frac{15}{16} I_0
\end{gathered}
\end{aligned}
\)
Q41. A rigid massless rod of length \(3l\) has two masses attached at each end as shown in the figure. The rod is pivoted at point \(P\) on the horizontal axis (see figure). When released from initial horizontal position, its instantaneous angular acceleration will be [JEE Main 2019]
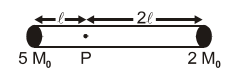
(A) \(\frac{g}{13 l}\)
(B) \(\frac{g}{2 l}\)
(C) \(\frac{g}{3 l}\)
(D) \(\frac{7 g}{3 l}\)
Solution: (A) To find the instantaneous angular acceleration \(\alpha\) of the rod upon release, we analyze the net torque ( \(\tau_{\text {net }}\) ) and the moment of inertia ( \(I\) ) about the pivot point \(P\).
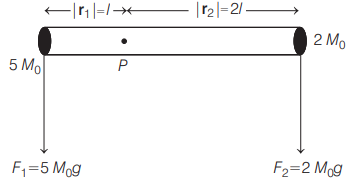
Step 1: Identify the Geometry and Forces
Based on the problem setup from the JEE Main 2019 (10th Jan Evening Slot):
Total Length: \(3 l\)
Masses: \(M_1=5 M_0\) and \(M_2=2 M_0\) at the ends.
Pivot Point \(P\) : Located at a distance \(l\) from \(5 M_0\) and \(2 l\) from \(2 M_0\).
Forces: Both masses experience a downward gravitational force ( \(F=m g\) ).
Step 2: Calculate Net Torque ( \(\tau _{\text {net }}\) ) about \(P\) Torque is \(\tau=r \times F\). Taking the clockwise direction as positive:
Torque by \(5 M_0: \tau_1=\left(5 M_0 g\right) \cdot l\) (Clockwise)
Torque by \(2 M_0: \tau_2=\left(2 M_0 g\right) \cdot 2 l=4 M_0 g l\) (Anticlockwise)
The net torque is:
\(
\tau_{n e t}=5 M_0 g l-4 M_0 g l=M_0 g l(\text { Clockwise })
\)
Step 3: Calculate Moment of Inertia ( \(I\) ) about \(P\)
The rod is massless, so \(I[latex] is only the sum of [latex]m r^2\) for the two point masses:
\(
\begin{gathered}
I=\left(5 M_0\right)(l)^2+\left(2 M_0\right)(2 l)^2 \\
I=5 M_0 l^2+2 M_0\left(4 l^2\right)=5 M_0 l^2+8 M_0 l^2 \\
I=13 M_0 l^2
\end{gathered}
\)
Step 4: Find Angular Acceleration ( \(\alpha\) )
Using Newton’s Second Law for rotation:
\(
\begin{gathered}
\tau_{\text {net }}=I \alpha \\
M_0 g l=\left(13 M_0 l^2\right) \alpha
\end{gathered}
\)
Rearranging for \(\alpha\) :
\(
\alpha=\frac{M_0 g l}{13 M_0 l^2}=\frac{g}{13 l}
\)
Q42. Two identical spherical balls of mass \(M\) and radius \(R\) each are stuck on two ends of a rod of length \(2 R\) and mass \(M\) (see figure). The moment of inertia of the system about the axis passing perpendicularly through the centre of the rod is : [JEE Main 2019]
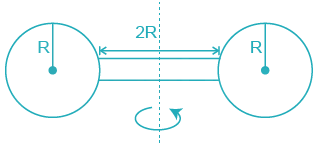
Solution: To find the moment of inertia ( \(I\) ) of the entire system, we sum the moments of inertia of its individual components: the central rod and the two spherical balls at the ends.
Step 1: Identify the Components
Rod: Mass \(=M\), Length \(L=2 R\). The axis passes through its center and is perpendicular to its length.
Spheres: Two identical solid spheres, each with mass \(M\) and radius \(R\).
Step 2: Moment of Inertia of the Rod ( \(I_{\text {rod }}\) )
The moment of inertia of a uniform rod about a perpendicular axis through its center is:
\(
I_{rod}=\frac{1}{12} M L^2
\)
Substituting \(L=2 R\) :
\(
I_{\text {rod }}=\frac{1}{12} M(2 R)^2=\frac{4 M R^2}{12}=\frac{1}{3} M R^2
\)
Step 3: Moment of Inertia of the Spheres ( \(I_{\text {spheres }}\) )
First, find the moment of inertia of one sphere about the central axis using the Parallel Axis Theorem:
\(
I=I_{c m}+M d^2
\)
\(I_{c m}\) (Solid Sphere): \(\frac{2}{5} M R^2\)
Distance ( \(d\) ): The distance from the center of the rod to the center of either sphere. Since the rod length is \(2 R\), the distance from the center to the end of the rod is \(R\). The sphere itself has radius \(R\), so its center is at a distance \(d=R+R=2 R\) from the central axis.
For one sphere:
\(
\begin{gathered}
I_{\text {one_sphere }}=\frac{2}{5} M R^2+M(2 R)^2 \\
I_{\text {one_sphere }}=\frac{2}{5} M R^2+4 M R^2=\frac{22}{5} M R^2
\end{gathered}
\)
For two spheres:
\(
I_{\text {two_spheres }}=2 \times \frac{22}{5} M R^2=\frac{44}{5} M R^2
\)
Step 4: Total Moment of Inertia ( \(I_{\text {total }}\) )
Add the contributions of the rod and both spheres:
\(
\begin{aligned}
& I_{\text {total }}=I_{\text {rod }}+I_{\text {two_spheres }} \\
& I_{\text {total }}=\frac{1}{3} M R^2+\frac{44}{5} M R^2
\end{aligned}
\)
To add these, find a common denominator (15):
\(
I_{\text {total }}=\left(\frac{5}{15}+\frac{132}{15}\right) M R^2=\frac{137}{15} M R^2
\)
Q43. To mop-clean a floor, a cleaning machine presses a circular mop of radius \(R\) vertically down with a total force \(F\) and rotates it with a constant angular speed about its axis. If the force \(F\) is distributed uniformly over the mop and if coefficient of friction between the mop and the floor is \(\mu\), the torque, applied by the machine on the mop is [JEE Main 2019 (Online) 10th January Morning Slot]
(A) \(\mu FR / 2\)
(B) \(\mu FR / 3\)
(C) \(\mu FR / 6\)
(D) \(\frac{2}{3} \mu FR\)
Solution: (B) Let a small strip of mop has width \(dx\) and radius \(x\) , as shown below,
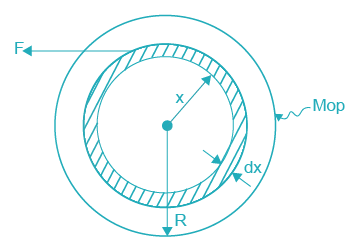
Torque applied to move this strip is
\(d \tau=\) Force on strip x Perpendicular distance from the axis
\(d \tau=\) Force per unit area x Area of strip x Perpendicular distance from the axis.
Calculation:
Given,
Radius of the mop \(=R\)
Force applied on the mop \(=F\)
Friction coefficient between the mop and the floor \(=\mu\)
Here, Force per unit area \(=\frac{F}{A}=\frac{F}{\pi R^2}\)
Area of the strip \(=2 \pi r=2 \pi x d x\)
Perpendicular distance from the axis \(= x\)
Applying all these in torque,
\(
\begin{aligned}
& \Rightarrow d \tau=\frac{\mu F}{\pi R^2} 2 \pi x d x . x \\
& \Rightarrow d \tau=\frac{2 \mu F x^2}{R^2} \cdot d x
\end{aligned}
\)
So, the total torque to be applied on the mop is
\(
\begin{aligned}
& \Rightarrow \tau=\int_{x=0}^{x=R} d \tau=\int_0^R \frac{2 \mu F x^2}{R^2} \cdot d x \\
& \Rightarrow \tau=\frac{2 \mu F}{R^2} \times\left[\frac{x^3}{3}\right]_0^R
\end{aligned}
\)
\(
\begin{aligned}
&\begin{aligned}
& \Rightarrow \tau=\frac{2 \mu F}{R^2} \times \frac{R^3}{3} \\
& \therefore \tau=\frac{2}{3} \mu F R(Nm)
\end{aligned}\\
&\text { Therefore, the torque applied by the machine on the mop is } \frac{2}{3} \mu F R(Nm) \text {. }
\end{aligned}
\)
Q44. A rod of length 50 cm is pivoted at one end. It is raised such that if makes an angle of \(30^{\circ}\) from the horizontal as shown and released from rest. Its angular speed when it passes through the horizontal (in rad \(\left.s ^{-1}\right)\) will be \(\left( g =10 ms^{-2}\right)\) [JEE 2019]
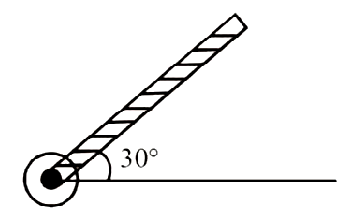
Solution: To find the angular speed of the rod as it passes through the horizontal position, we use the Principle of Conservation of Mechanical Energy. Since the pivot is frictionless, the decrease in gravitational potential energy equals the increase in rotational kinetic energy.
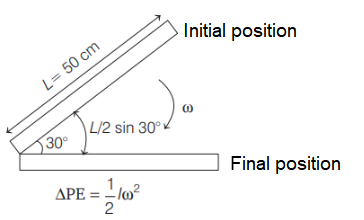
Step 1: Identify the Change in Height (\(h\))
The potential energy is calculated based on the position of the Center of Mass (COM). For a uniform rod of length \(L\), the COM is at \(L / 2\).
Initial Position: The rod makes an angle \(\theta=30^{\circ}\) with the horizontal. The height of the COM relative to the horizontal pivot line is:
\(
h=\frac{L}{2} \sin \left(30^{\circ}\right)
\)
Final Position: The rod is horizontal, so the height of the COM is 0.
Step 2: Energy Conservation Equation
Taking the horizontal line as the reference for zero potential energy (PE):
\(
\begin{gathered}
P E_{\text {initial }}+K E_{\text {initial }}=P E_{\text {final }}+K E_{\text {final }} \\
M g\left(\frac{L}{2} \sin 30^{\circ}\right)+0=0+\frac{1}{2} I \omega^2
\end{gathered}
\)
Where:
\(M[latex] is the mass of the rod.
[latex]L=50 cm=0.5 m\).
\(I\) is the moment of inertia of the rod about the pivot (end): \(I=\frac{1}{3} M L^2\).
Step 3: Solving for Angular Speed ( \(\omega\) )
Substitute the expression for \(I\) into the energy equation:
\(
M g \frac{L}{2} \sin 30^{\circ}=\frac{1}{2}\left(\frac{1}{3} M L^2\right) \omega^2
\)
\(
\omega^2=\frac{6 g}{4 L}=\frac{3 g}{2 L}
\)
Given \(g=10 ms^{-2}\) and \(L=0.5 m\) :
\(
\begin{gathered}
\omega^2=\frac{3 \times 10}{2 \times 0.5} \\
\omega^2=\frac{30}{1}=30 \\
\omega=\sqrt{30}
\end{gathered}
\)
Q45. If the angular momentum of a planet of mass \(m\), moving around the Sun in a circular orbit is \(L\), about the center of the Sun, its areal velocity is : [JEE Main 2019]
(A) \(\frac{L}{m}\)
(B) \(\frac{4 L}{m}\)
(C) \(\frac{L}{2 m}\)
(D) \(\frac{2 L}{m}\)
Solution: (C) To find the relation between angular momentum and areal velocity, we look at the geometry of the planet’s motion over a very small interval of time \(d t\).
Step 1: Defining Areal Velocity
Areal velocity is the rate at which the position vector of the planet sweeps out area. Consider a planet moving in a circular orbit of radius \(r\). In a small time \(d t\), the planet moves through an angle \(d \theta\), covering an arc length \(d r=r d \theta\).
The area \(d A\) of the resulting thin triangle (sector) is:
\(
d A=\frac{1}{2} \times \text { base × height }=\frac{1}{2}(r)(r d \theta)=\frac{1}{2} r^2 d \theta
\)
Dividing by \(d t\) gives the areal velocity:
\(
\frac{d A}{d t}=\frac{1}{2} r^2 \frac{d \theta}{d t}=\frac{1}{2} r^2 \omega
\)
Step 2: Relating to Angular Momentum
The angular momentum \(L\) of a particle of mass \(m\) in a circular orbit is given by:
\(
L=I \omega=\left(m r^2\right) \omega
\)
From this, we can isolate the term \(r^2 \omega\) :
\(
r^2 \omega=\frac{L}{m}
\)
Step 3: Substitution
Now, substitute the value of \(r^2 \omega\) back into the areal velocity equation:
\(
\frac{d A}{d t}=\frac{1}{2}\left(\frac{L}{m}\right)
\)
Areal Velocity \(=\frac{L}{2 m}\)
Q46. An L-shaped object, made of thin rods of uniform mass density, is suspended with a string as shown in figure. If \(A B=B C\), and the angle made by \(A B\) with downward vertical is \(\theta\), thrown : [JEE Main 2019]
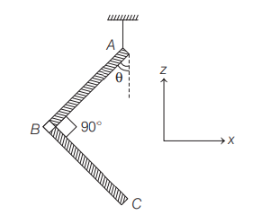
(A) \(\tan \theta=\frac{1}{2 \sqrt{3}}\)
(B) \(\tan \theta=\frac{1}{2}\)
(C) \(\tan \theta=\frac{2}{\sqrt{3}}\)
(D) \(\tan \theta=\frac{1}{3}\)
Solution: To solve for the angle \(\theta\), we need to analyze the equilibrium of the \(L\)-shaped object. When an object is suspended from a point, it reaches equilibrium when its Center of Mass (COM) lies directly below the point of suspension (A).
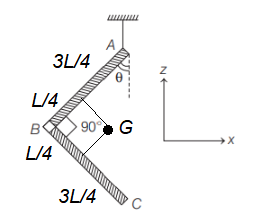
Step 1: Coordinate System Setup
Let the length of each rod ( \(A B\) and \(B C\) ) be \(L\) and the mass of each be \(M\). We can place the origin at point \(B\) :
Rod AB: Its COM is at \((0, L / 2)\).
Rod BC: Its COM is at \((L / 2,0)\).
Step 2: Locate the Center of Mass of the System
The coordinates ( \(X, Y\) ) of the system’s COM relative to point \(B\) are:
\(
\begin{aligned}
&X_{c m}=\frac{M(0)+M(L / 2)}{M+M}=\frac{L}{4}\\
&Y_{c m}=\frac{M(L / 2)+M(0)}{M+M}=\frac{L}{4}
\end{aligned}
\)
So, the COM of the L-shaped object is at a point \(G\) with coordinates \((L / 4, L / 4)\) relative to \(B\).
Step 3: Trigonometric Relationship at Equilibrium
In equilibrium, the line joining the suspension point \(A\) and the COM \(G\) must be vertical.
Let’s look at the triangle formed by points \(A, B\), and \(G\) in the frame of the rod:
Point \(A\) is at \((0, L)\) relative to \(B\).
Point \(G\) is at \((L / 4, L / 4)\) relative to \(B\).
The horizontal distance between \(A\) and \(G\) is \(x=L / 4\). The vertical distance between \(A\) and \(G\) is \(y=L-L / 4=3 L / 4\).
The angle \(\theta\) is the angle \(A B\) makes with the vertical (the line \(A G\) ). In the triangle formed by the horizontal and vertical displacements:
\(
\tan \theta=\frac{\text { Horizontal distance from } B \text { to } G}{\text { Vertical distance from } B \text { to } G \text { relative to } A}
\)
\(
\begin{gathered}
\tan \theta=\frac{X_{c m}}{L-Y_{c m}} \\
\tan \theta=\frac{L / 4}{L-L / 4}=\frac{L / 4}{3 L / 4} \\
\tan \theta=\frac{1}{3}
\end{gathered}
\)
Q47. Three particles of masses \(50 g, 100 g\) and 150 g are placed at the vertices of an equilateral triangle of side 1 m (as shown in the figure). The \(( x , y )\) coordinates of the centre of mass will be : [JEE Main 2019]
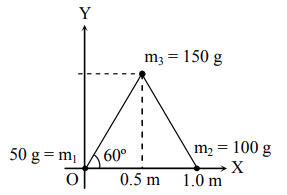
Solution: To find the center of mass ( \(X_{c m}, Y_{c m}\) ) for a system of particles, we use the weighted average of their positions based on their masses.
Step 1: Identify the Coordinates and Masses
Based on the figure provided, we can define the positions of the three masses. The origin \((0,0)\) is at \(m_1\).
\(
\begin{array}{llll}
\text { Particle } & \text { Mass }(m) & x \text {-coordinate }(x) & y \text {-coordinate }(y) \\
m_1 & 50 g & 0 & 0 \\
m_2 & 100 g & 1.0 m & 0 \\
m_3 & 150 g & 0.5 m & 0.5 \times \tan \left(60^{\circ}\right)=\frac{\sqrt{3}}{2} m
\end{array}
\)
Step 2: Calculate the \(X\)-coordinate ( \(X_{c m}\) )
The formula for the x -coordinate of the center of mass is:
\(
X_{c m}=\frac{m_1 x_1+m_2 x_2+m_3 x_3}{m_1+m_2+m_3}
\)
Substituting the values:
\(
\begin{gathered}
X_{c m}=\frac{(50 \times 0)+(100 \times 1)+(150 \times 0.5)}{50+100+150} \\
X_{c m}=\frac{0+100+75}{300}=\frac{175}{300}
\end{gathered}
\)
Dividing by 25 :
\(
X_{c m}=\frac{7}{12} m
\)
Step 3: Calculate the \(Y\)-coordinate ( \(Y_{\text {cm }}\) )
The formula for the \(y\)-coordinate of the center of mass is:
\(
Y_{c m}=\frac{m_1 y_1+m_2 y_2+m_3 y_3}{m_1+m_2+m_3}
\)
Substituting the values:
\(
\begin{gathered}
Y_{c m}=\frac{(50 \times 0)+(100 \times 0)+\left(150 \times \frac{\sqrt{3}}{2}\right)}{300} \\
Y_{c m}=\frac{75 \sqrt{3}}{300}
\end{gathered}
\)
Dividing by 75:
\(
Y_{c m}=\frac{\sqrt{3}}{4} m
\)
The coordinates of the center of mass are \(\left(\frac{7}{12} m, \frac{\sqrt{3}}{4} m\right)\).
Q48. A man (mass \(=50 kg\) ) and his son (mass \(=20 kg\) ) are standing on a frictionless surface facing each other. The man pushes his son so that he starts moving at a speed of \(0.70 ms^{-1}\) with respect to the man. The speed of the man with respect to the surface is : [JEE Main 2019]
(A) \(0.28 ms^{-1}\)
(B) \(0.47 ms^{-1}\)
(C) \(0.20 ms^{-1}\)
(D) \(0.14 ms^{-1}\)
Solution: (C) To solve this problem, we need to use the Principle of Conservation of Linear Momentum and the concept of relative velocity.
Step 1: Conservation of Momentum
Since the surface is frictionless and there are no external horizontal forces acting on the system (the man and the son), the total momentum of the system must remain zero (since they started at rest).
Let:
\(m_m=50 kg\) (mass of the man)
\(m_s=20 kg\) (mass of the son)
\(v_m=\) velocity of the man with respect to the surface
\(v_s=\) velocity of the son with respect to the surface
\(
\begin{gathered}
m_m v_m+m_s v_s=0 \\
50 v_m+20 v_s=0 \Rightarrow 5 v_m=-2 v_s \dots(1)
\end{gathered}
\)
Step 2: Relative Velocity
The problem states the son moves at \(0.70 m / s\) with respect to the man. If we assume the son moves in the positive direction and the man moves in the negative direction:
\(
\begin{aligned}
& v_{s / m}=v_s-v_m=0.70 m / s \\
& v_s=0.70+v_m \dots(2)
\end{aligned}
\)
Step 3: Solving the Equations
Substitute Eq. 2 into Eq. 1:
\(
\begin{gathered}
5 v_m=-2\left(0.70+v_m\right) \\
5 v_m=-1.40-2 v_m \\
7 v_m=-1.40 \\
v_m=-0.20 m / s
\end{gathered}
\)
The negative sign indicates that the man moves in the opposite direction to the son. The speed (magnitude) of the man with respect to the surface is:
\(
\left|v_m\right|=0.20 m / s
\)
Q49. Two particles, of masses M and 2 M , moving, as shown, with speeds of \(10 m / s\) and \(5 m / s\), collide elastically at the origin. After the collision, they move along the indicated directions with speeds \(u _1\) and \(u _2\), respectively. The values of \(u _1\) and \(u _2\) are nearly : [JEE Main 2019]
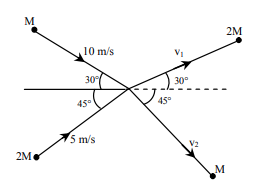
Solution: To find the velocities of the two particles, we have the following relation. Here, particle A with mass M makes an angle of 30 degree, whereas particle B of mass 2 M makes an angle of 45 degree. So, our equation becomes:
\(
\begin{aligned}
& M \times 10 \sin 30+2 M \times 5 \sin 45 \\
& =2 M \times v_1 \cos 30+M v_2 \cos 45
\end{aligned}
\)
Now, when we substitute the given values in above equation we get:
\(
5 \sqrt{3}+5 \sqrt{2}=2 v_1 \frac{\sqrt{3}}{2}+\frac{v_2}{\sqrt{2}}
\)
Now, after the collision of the two particles, we get the equation as:
\(
\begin{aligned}
& 10 \times M \sin 30-2 M \times 5 \sin 45 \\
& =M v_2 \sin 45-2 M v_1 \sin 30
\end{aligned}
\)
Substituting the given values in the above equation we get the required velocities as:
\(
\begin{aligned}
& 5-5 \sqrt{2}=\frac{v_2}{\sqrt{2}}-v_1 \\
& \Rightarrow v_1=\frac{17.5}{2.7} \approx 6.5 m / s \\
& \therefore v_2 \approx 6.3 m / s
\end{aligned}
\)
Q50. A wedge of mass \(M=4 m\) lies on a frictionless plane. A particle of mass \(m\) approaches the wedge with speed \(v\). There is no friction between the particle and the plane or between the particle and the wedge. The maximum height climbed by the particle on the wedge is given by : [JEE Main 2019]
(A) \(\frac{v^2}{g}\)
(B) \(\frac{2 v^2}{7 g}\)
(C) \(\frac{v^2}{2 g}\)
(D) \(\frac{2 v^2}{5 g}\)
Solution: To find the maximum height \(h\) reached by the particle on the wedge, we must consider two key physics principles: Conservation of Linear Momentum and Conservation of Mechanical Energy.
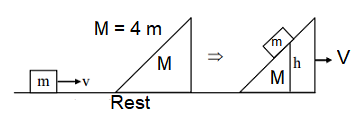
Step 1: The Condition at Maximum Height
When the particle reaches its maximum height on the wedge, it stops moving relative to the wedge. At this specific instant, both the particle ( \(m\) ) and the wedge ( \(M\) ) move together with a common horizontal velocity, which we will call \(V\).
Step 2: Conservation of Linear Momentum
Since there are no external horizontal forces acting on the system (the surface is frictionless), the horizontal momentum is conserved.
Initial Momentum: \(P_i=m \cdot v+M \cdot 0=m v\)
Final Momentum (at max height): \(P_f=(m+M) \cdot V\)
Setting them equal:
\(
m v=(m+M) V
\)
Substitute \(M=4 m\) :
\(
\begin{gathered}
m v=(m+4 m) V \Longrightarrow m v=5 m V \\
V=\frac{v}{5}
\end{gathered}
\)
Step 3: Conservation of Mechanical Energy
Since there is no friction, the initial kinetic energy of the particle is converted into the potential energy of the particle at height \(h\) and the shared kinetic energy of the system.
\(
\begin{aligned}
& \text { Initial K.E. }=\text { Final K.E. }+ \text { Potential Energy } \\
& \qquad \frac{1}{2} m v^2=\frac{1}{2}(m+M) V^2+m g h
\end{aligned}
\)
Substitute \(M=4 m\) and \(V=\frac{v}{5}\) :
\(
\frac{1}{2} m v^2=\frac{1}{2}(5 m)\left(\frac{v}{5}\right)^2+m g h
\)
\(
\frac{1}{2} m v^2=\frac{1}{10} m v^2+m g h
\)
Step 4: Solving for \(h\)
Subtract the kinetic energy term from both sides:
\(
m g h=\frac{1}{2} m v^2-\frac{1}{10} m v^2
\)
To subtract, use a common denominator (10):
\(
\begin{gathered}
m g h=\frac{5}{10} m v^2-\frac{1}{10} m v^2=\frac{4}{10} m v^2 \\
m g h=\frac{2}{5} m v^2
\end{gathered}
\)
Divide both sides by \(m g\) :
\(
h=\frac{2 v^2}{5 g}
\)
Q51. A particle of mass ‘ \(m\) ‘ is moving with speed ‘ \(2 v\) ‘ and collides with a mass ‘ \(2 m\) ‘ moving with speed ‘ \(v\) ‘ in the same direction. After collision, the first mass is stopped completely while the second one splits into two particles each of mass ‘ \(m\) ‘, which move at angle \(45^{\circ}\) with respect to the origianl direction. The speed of each of the moving particle will be : [ JEE Main 2019]
(A) \(2 \sqrt{2} v\)
(B) \(v /(2 \sqrt{2})\)
(C) \(v / \sqrt{2}\)
(D) \(\sqrt{2} v\)
Solution: To solve this problem, we apply the Principle of Conservation of Linear Momentum. Since there are no external horizontal forces, the total momentum before the collision must equal the total momentum after the collision in both the \(x\) (original direction) and \(y\) (perpendicular) directions.
Step 1: Initial Momentum ( \(P_{\text {initial }}\) )
Both masses are initially moving in the same direction (let’s call this the \(x\)-axis).
Mass \(1(m)\) : moves with speed \(2 v\).
Mass \(2(2 m)\) : moves with speed \(v\).
\(
P_{\text {initial }}=m(2 v)+2 m(v)=4 m v
\)
Step 2: Final Momentum ( \(P_{\text {final }}\) )
After the collision:
The first mass \((m)\) stops completely \(\left(v_f=0\right)\).
The second mass \((2 m)\) splits into two particles of mass \(m\) each.
These two particles move at an angle of \(45^{\circ}\) with respect to the original direction. Let their speed be \(u\).
We analyze the components of the final momentum:
Along the Y-axis (Perpendicular): The two particles move at \(45^{\circ}\) on opposite sides of the \(x\) axis to ensure the net \(y\)-momentum remains zero (since initial \(y\)-momentum was zero).
\(
P_{f y}=m\left(u \sin 45^{\circ}\right)-m\left(u \sin 45^{\circ}\right)=0
\)
(This confirms the symmetry of the split.)
Along the \(X\)-axis (Original Direction):
\(
\begin{gathered}
P_{f x}=m(0)+m\left(u \cos 45^{\circ}\right)+m\left(u \cos 45^{\circ}\right) \\
P_{f x}=2 m u \cos 45^{\circ} \\
P_{f x}=2 m u\left(\frac{1}{\sqrt{2}}\right)=\sqrt{2} m u
\end{gathered}
\)
Step 3: Equating Initial and Final Momentum
By the conservation of momentum in the \(x\)-direction:
\(
P_{\text {initial }}=P_{f x}
\)
\(
4 m v=\sqrt{2} m u
\)
Divide both sides by \(m\) :
\(
4 v=\sqrt{2} u
\)
Solve for \(u\) :
\(
\begin{gathered}
u=\frac{4 v}{\sqrt{2}} \\
u=2 \sqrt{2} v
\end{gathered}
\)
The speed of each of the moving particles is \(2 \sqrt{2} v\).
Q52. A body of mass 2 kg makes an eleastic collision with a second body at rest and continues to move in the original direction but with one fourth of its original speed. What is the mass of the second body? [JEE Main 2019]
Solution: To solve this problem, we use the properties of a one-dimensional elastic collision.
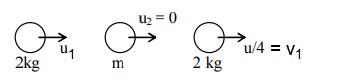
Step 1: Identify the Given Information
Let the two bodies be \(m_1\) and \(m_2\).
Mass of first body: \(m_1=2 kg\)
Mass of second body: \(m_2=\) ? (to be found)
Initial velocity of \(m_1: u_1=v\)
Initial velocity of \(m_2: u_2=0\) (at rest)
Final velocity of \(m_1: v_1=\frac{v}{4}\) (moving in the same direction)
Step 2: The Formula for Final Velocity
In a perfectly elastic collision where the second body is initially at rest ( \(u_2=0\) ), the final velocity of the first body \(\left(v_1\right)\) is given by the formula:
\(
v_1=\left(\frac{m_1-m_2}{m_1+m_2}\right) u_1
\)
Step 3: Set up the Equation
Substitute the given values into the formula:
\(
\frac{v}{4}=\left(\frac{2-m_2}{2+m_2}\right) v
\)
Since \(v \neq 0\), we can cancel \(v\) from both sides:
\(
\frac{1}{4}=\frac{2-m_2}{2+m_2}
\)
Step 4: Solve for \(m_2\)
Cross-multiply to solve the linear equation:
\(
\begin{gathered}
1\left(2+m_2\right)=4\left(2-m_2\right) \\
2+m_2=8-4 m_2
\end{gathered}
\)
Bring the \(m_2\) terms to one side:
\(
m_2+4 m_2=8-2
\)
\(
m_2=1.2 kg
\)
Q53. A ball is thrown vertically up (taken as + \(z\) -axis) from the ground. The correct momentum-height ( \(p – h\) ) diagram is : [JEE Main 2019]
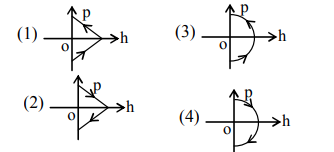
Solution: (4) To determine the correct momentum-height ( \(p-h\) ) diagram for a ball thrown vertically upward (where the \(+z\)-axis is upward), we analyze the relationship between velocity and height using the laws of kinematics.
Step 1: Mathematical Relationship
The velocity \(v\) of the ball at a height \(h\) is given by the third equation of motion:
\(
v^2=u^2-2 g h
\)
where \(u\) is the initial velocity and \(g\) is the acceleration due to gravity.
Since momentum is defined as \(p=m v\), we can substitute \(v=\frac{p}{m}\) into the equation:
\(
\left(\frac{p}{m}\right)^2=u^2-2 g h \Longrightarrow p^2=m^2\left(u^2-2 g h\right)
\)
Rearranging for \(h\) :
\(
\begin{gathered}
2 m^2 g h=m^2 u^2-p^2 \\
h=\frac{u^2}{2 g}-\frac{p^2}{2 m^2 g}
\end{gathered}
\)
This equation represents a parabola opening towards the negative \(h\)-axis. Because \(p\) is squared, the graph is symmetric about the \(h\)-axis (where \(p=0\) ).
Step 2: Physical Characteristics of the Motion
We can describe the journey in two phases:
Upward Journey: At \(h=0, p\) is maximum and positive (moving along \(+z\) ). As the ball rises ( \(h\) increases), \(p\) decreases until it reaches zero at maximum height \(\left(h_{\text {max }}\right)\).
Downward Journey: From \(h_{\text {max }}\), the ball falls back down. As \(h\) decreases, the velocity becomes negative (moving along \(-z\) ), and its magnitude increases. At \(h=0, p\) reaches its maximum negative value.
Step 3: Identifying the Graph
The resulting diagram will have the following properties:
a. Shape: A parabolic curve (specifically, a side-opening parabola).
b. Coordinates: It starts at a positive \(p\) value on the vertical axis (at \(h=0\) ), curves to touch the horizontal \(h\)-axis at \(h_{\text {max }}\) (where \(p=0\) ), and then curves back into the negative \(p\) region as it returns to \(h=0\).
c. Visual Representation: It looks like a “rotated” parabola that encloses the \(h\)-axis.
Q54. A body of mass \(m _1\) moving with an unknown velocity of \(v_1 \hat{i}\), undergoes a collinear collision with a body of mass \(m _2\) moving with a velocity \(v_2 \hat{i}\). After collision, \(m _1\) and \(m _2\) move with velocities of \({v_3} \hat{i}\) and \({v_4} \hat{i}\), respectively. If \(m _2=0.5 m_1\) and \(v _3=0.5 v _1\), then \(v _1\) is : [JEE Main 2019]
(A) \(v_4-\frac{v_2}{2}\)
(B) \(v_4-\frac{v_2}{4}\)
(C) \(v_4-v_2\)
(D) \(v_4+v_2\)
Solution: (C) Step 1: Set up the conservation of momentum equation
The principle of conservation of linear momentum states that the total momentum before collision equals the total momentum after collision for a closed system. The equation for this collinear collision is \(m_1 v_1+m_2 v_2=m_1 v_3+m_2 v_4\).
Step 2: Substitute given values and solve for \(v _1\)
We are given the relationships \(m_2=0.5 m_1\) and \(v_3=0.5 v_1\). Substituting these into the conservation of momentum equation:
\(
m_1 v_1+0.5 m_1 v_2=m_1\left(0.5 v_1\right)+0.5 m_1 v_4
\)
Dividing all terms by the common factor \(m_1\) yields:
\(
v_1+0.5 v_2=0.5 v_1+0.5 v_4
\)
Rearranging the equation to solve for \(v_1\) :
\(
\begin{gathered}
v_1-0.5 v_1=0.5 v_4-0.5 v_2 \\
0.5 v_1=0.5\left(v_4-v_2\right) \\
v_1=v_4-v_2
\end{gathered}
\)
Q55. A uniform rectangular thin sheet \(A B C D\) of mass \(M\) has length \(a\) and breadth \(b\), as shown in the figure. If the shaded portion HBGO is cutoff, the coordinates of the centre of mass of the remaining portion will be : [JEE Main 2019]
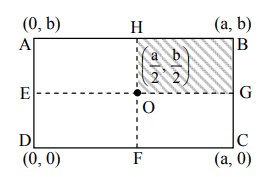
Solution: Step 1: Identify Masses and Coordinates
Let the origin \((0,0)\) be at point \(A\) (the bottom-left corner). The sheet \(A B C D\) has mass \(M\), length \(a\) (along the x -axis), and breadth \(b\) (along the y -axis).
Original Sheet \(\left(M_1\right)\) :
Mass: \(M_1=M\)
Center of Mass: \(\left(x_1, y_1\right)=\left(\frac{a}{2}, \frac{b}{2}\right)\)
Removed Portion \(\left(M_2\right)\) :
The shaded portion \(H B G O\) is a rectangle with dimensions \(\frac{a}{2}\) and \(\frac{b}{2}\).
Area of \(H B G O=\frac{a}{2} \times \frac{b}{2}=\frac{a b}{4}\). Since the total area is \(a b\), the mass is \(M_2=\frac{M}{4}\).
Its center is at the midpoint of its own length and breadth. Looking at the figure, \(H B G O\) is the top-right quadrant.
Center of Mass: \(\left(x_2, y_2\right)=\left(\frac{a}{2}+\frac{a}{4}, \frac{b}{2}+\frac{b}{4}\right)=\left(\frac{3 a}{4}, \frac{3 b}{4}\right)\)
Step 2: Calculate the New Centre of Mass
The formula for the center of mass after removal is:
\(
X_{c m}=\frac{M_1 x_1-M_2 x_2}{M_1-M_2}
\)
For the \(X\)-coordinate:
\(
\begin{aligned}
& X_{c m}=\frac{M\left(\frac{a}{2}\right)-\frac{M}{4}\left(\frac{3 a}{4}\right)}{M-\frac{M}{4}} \\
& X_{c m}=\frac{\frac{a}{2}-\frac{3 a}{16}}{\frac{3}{4}}=\frac{\frac{8 a-3 a}{16}}{\frac{3}{4}} \\
& X_{c m}=\frac{5 a}{16} \times \frac{4}{3}=\frac{5 a}{12}
\end{aligned}
\)
For the \(Y\)-coordinate: Since the geometry is symmetric with respect to \(a\) and \(b\) :
\(
Y_{c m}=\frac{M\left(\frac{b}{2}\right)-\frac{M}{4}\left(\frac{3 b}{4}\right)}{M-\frac{M}{4}}=\frac{5 b}{12}
\)
The coordinates of the center of mass of the remaining portion are:
\(
\left(\frac{5 a}{12}, \frac{5 b}{12}\right)
\)
Q56. Four particles \(A, B, C\) and \(D\) with masses \(m_A=m, m_B=2 m, m_C=3 m\) and \(m_D=4 m\) are at the corners of a square. They have accelerations of equal magnitude with directions as shown. The acceleration of the centre of mass of the particles is : [JEE Main 2019]
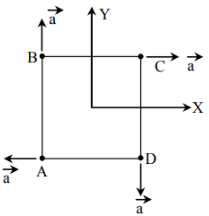
Solution: To find the acceleration of the center of mass \(\left(a_{c m}\right)\), we use the vector sum of the individual accelerations weighted by their masses.
Step 1: Vector Form of Accelerations
Based on the standard diagram (where the square is in the \(x y\) plane), the directions of the accelerations of magnitude \(a\) are:
Particle \(A (m)\) : Accelerating along the negative x -axis \(\rightarrow a_A=-a \hat{i}\)
Particle B ( \(2 m\) ): Accelerating along the positive y -axis \(\rightarrow a_B=a \hat{j}\)
Particle \(C (3 m)\) : Accelerating along the positive x -axis \(\rightarrow a_C=a \hat{i}\)
Particle \(D (4 m)\) : Accelerating along the negative y -axis \(\rightarrow a_D=-a \hat{j}\)
Step 2: Formula for Acceleration of Centre of Mass
The acceleration of the center of mass is given by:
\(
a_{c m}=\frac{m_A a_A+m_B a_B+m_C a_C+m_D a_D}{m_A+m_B+m_C+m_D}
\)
Step 3: Substitution and Calculation
Total mass of the system:
\(
M_{\text {total }}=m+2 m+3 m+4 m=10 m
\)
Substituting the vectors:
\(
\begin{gathered}
a_{c m}=\frac{m(-a \hat{i})+2 m(a \hat{j})+3 m(a \hat{i})+4 m(-a \hat{j})}{10 m} \\
a_{c m}=\frac{-m a \hat{i}+3 m a \hat{i}+2 m a \hat{j}-4 m a \hat{j}}{10 m}
\end{gathered}
\)
\(
\begin{gathered}
a_{c m}=\frac{-m a \hat{i}+3 m a \hat{i}+2 m a \hat{j}-4 m a \hat{j}}{10 m} \\
a_{c m}=\frac{2 m a \hat{i}-2 m a \hat{j}}{10 m}
\end{gathered}
\)
Simplifying by \(2 m\) :
\(
a_{c m}=\frac{a(\hat{i}-\hat{j})}{5}
\)
The acceleration of the centre of mass is \(\frac{a}{5}(\hat{i}-\hat{j})\).
Q57. If \(10^{22}\) gas molecules each of mass \(10^{-26} kg\) collide with a surface (perpendicular to it) elastically per second over an area \(1 m^2\) with a speed \(10^4 m / s\), the pressure exerted by the gas molecules will be of the order of: [JEE Main 2019]
(A) \(10^8 N / m ^2\)
(B) \(10^{16} N / m ^2\)
(C) \(10^4 N / m ^2\)
(D) \(2 N / m ^2\)
Solution: (D) To solve this problem, we apply Newton’s Second Law and the concept of change in momentum for particles colliding with a surface.
Step 1: Change in Momentum per Collision
When a molecule of mass \(m\) moving with speed \(v\) hits a surface perpendicularly and bounces back elastically, its velocity changes from \(+v\) to \(-v\). The change in momentum ( \(\Delta p\) ) for one molecule is:
\(
\Delta p=m v-(-m v)=2 m v
\)
Step 2: Force Exerted by the Molecules
Force \((F)\) is defined as the rate of change of momentum. If \(N\) molecules collide with the surface per second ( \(t=1 s\) ), the total force is:
\(
F=\frac{\text { Total Change in Momentum }}{\text { Time }}=\frac{N \times(2 m v)}{t}
\)
Given values:
\(N=10^{22}\) molecules \(/ s\)
\(m=10^{-26} kg\)
\(v=10^4 m / s\)
Substitute these into the force equation:
\(
\begin{gathered}
F=10^{22} \times 2 \times 10^{-26} \times 10^4 \\
F=2 \times 10^{(22-26+4)}=2 \times 10^0=2 N
\end{gathered}
\)
Step 3: Pressure Calculation
Pressure \((P)\) is force per unit area \((A)\) :
\(
P=\frac{F}{A}
\)
Given that \(A=1 m^2\) :
\(
P=\frac{2 N}{1 m^2}=2 N / m^2
\)
Q58. An alpha-particle of mass \(m\) suffers 1-dimensional elastic collision with a nucleus at rest of unknown mass. It is scattered directly backwards losing, 64% of its initial kinetic energy. The mass of the nucleus is [JEE Main 2019]
Solution: To solve this problem, we use the principles of Conservation of Linear Momentum and Conservation of Kinetic Energy for a 1-dimensional elastic collision.
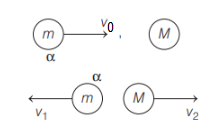
Step 1: Identify Velocity after Collision
Let the initial velocity of the alpha particle (mass \(m\) ) be \(v_0\). Since the collision is elastic and it loses 64% of its kinetic energy (K.E.), the remaining kinetic energy of the alpha particle is:
\(
K . E_{\cdot \text { final }}=(100 \%-64 \%) K . E_{\cdot \text { initial }}=36 \% K . E_{\cdot \text { initial }}
\)
The formula for kinetic energy is \(K . E .=\frac{1}{2} m v^2\). Therefore:
\(
\begin{gathered}
\frac{1}{2} m v_1^2=0.36 \times \frac{1}{2} m v_0^2 \\
v_1^2=0.36 v_0^2 \Longrightarrow v_1=0.6 v_0
\end{gathered}
\)
Since it is scattered directly backwards, its velocity vector is \(v_1=-0.6 v_0\).
Step 2: Energy Transferred to the Nucleus
In an elastic collision, the energy lost by the alpha particle is gained by the nucleus (mass \(M\) ).
\(
\begin{gathered}
K . E_{\cdot n u d e u s}=0.64 \times \frac{1}{2} m v_0^2 \\
\frac{1}{2} M v_2^2=0.64 \times \frac{1}{2} m v_0^2 \Longrightarrow v_2=\sqrt{\frac{m}{M}} \times 0.8 v_0
\end{gathered}
\)
Step 3: Conservation of Momentum
The initial momentum must equal the final momentum:
\(
\begin{gathered}
m v_0=m\left(-0.6 v_0\right)+M v_2 \\
m v_0+0.6 m v_0=M\left(\sqrt{\frac{m}{M}} \times 0.8 v_0\right) \\
1.6 m v_0=\sqrt{m M} \times 0.8 v_0
\end{gathered}
\)
Divide both sides by \(0.8 v_0\) :
\(
2 m=\sqrt{m M}
\)
\(
M=4 m
\)
The mass of the unknown nucleus is \(4 m\).
Q59. The position vector of the centre of mass \(\vec{r}_{c m}\) of an asymmetric uniform bar of negligible area of crosssection as shown in figure is : [JEE Main 2019]
Solution:
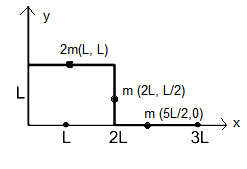
Total Mass (M):
\(
M=2 m+m+m=4 m
\)
X-coordinate ( \(X_{c m}\) ):
\(
\begin{gathered}
X_{c m}=\frac{(2 m \cdot L)+(m \cdot 2 L)+(m \cdot 2.5 L)}{4 m} \\
X_{c m}=\frac{2 m L+2 m L+2.5 m L}{4 m}=\frac{6.5 m L}{4 m}=\frac{13}{8} L
\end{gathered}
\)
Y-coordinate ( \(Y_{c m}\) ):
\(
\begin{gathered}
Y_{c m}=\frac{(2 m \cdot L)+\left(m \cdot \frac{L}{2}\right)+(m \cdot 0)}{4 m} \\
Y_{c m}=\frac{2 m L+0.5 m L+0}{4 m}=\frac{2.5 m L}{4 m}=\frac{5}{8} L
\end{gathered}
\)
\(
\begin{aligned}
&\text { The position vector of the center of mass is: }\\
&r_{c m}=\frac{13}{8} L \hat{x}+\frac{5}{8} L \hat{y}
\end{aligned}
\)
Q60. A simple pendulum, made of a string of length \(\ell\) and a bob of mass m , is released from a small angle \(\theta_0\). It strikes a block of mass M , kept on a horizontal surface at its lowest point of oscillations, elastically. It bounces back and goes up to an angle \(\theta_1\). Then M is given by : [JEE Main 2019]
(A) \(\frac{m}{2}\left(\frac{\theta_0+\theta_1}{\theta_0-\theta_1}\right)\)
(B) \(\frac{m}{2}\left(\frac{\theta_0-\theta_1}{\theta_0+\theta_1}\right)\)
(C) \(m\left(\frac{\theta_0+\theta_1}{\theta_0-\theta_1}\right)\)
(D) \(m\left(\frac{\theta_0-\theta_1}{\theta_0+\theta_1}\right)\)
Solution: (C) To find the mass \(M\) of the block, we use the principles of energy conservation and elastic collisions.
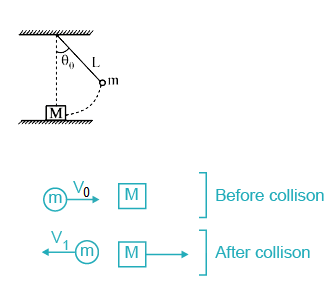
Step 1: Initial Velocity of the Bob
When the pendulum bob of mass \(m\) is released from an angle \(\theta_0\), its potential energy at the top is converted into kinetic energy at the bottom. The height \(h\) corresponding to an angle \(\theta\) is \(L(1-\cos \theta)\).
\(
\frac{1}{2} m v_0^2=m g L\left(1-\cos \theta_0\right)
\)
For small angles, we use the approximation \(\cos \theta \approx 1-\frac{\theta^2}{2}\).
\(
1-\cos \theta_0 \approx \frac{\theta_0^2}{2}
\)
Substituting this into the energy equation:
\(
\frac{1}{2} m v_0^2=m g L\left(\frac{\theta_0^2}{2}\right) \Longrightarrow v_0=\sqrt{g L} \cdot \theta_0
\)
Step 2: Velocity after Elastic Collision
The bob strikes a stationary block of mass \(M\) elastically. In a 1D elastic collision, the final velocity \(v_1\) of the first mass \((m)\) is:
\(
v_1=\left(\frac{m-M}{m+M}\right) v_0
\)
The bob bounces back, meaning \(v_1\) is in the opposite direction. Its magnitude is:
\(
\left|v_1\right|=\left|\frac{m-M}{m+M}\right| v_0
\)
Step 3: Final Height (Angle) of the Bob
After the collision, the bob rises to an angle \(\theta_1\). Its velocity just after collision is related to \(\theta_1\) similarly to the first step:
\(
\left|v_1\right|=\sqrt{g L} \cdot \theta_1
\)
Step 4: Solve for \(M\)
Equating the two expressions for \(\left|v_1\right|\) :
\(
\begin{gathered}
\sqrt{g L} \cdot \theta_1=\left|\frac{m-M}{m+M}\right| \sqrt{g L} \cdot \theta_0 \\
\frac{\theta_1}{\theta_0}=\frac{M-m}{M+m}
\end{gathered}
\)
(Note: Since it bounces back, \(M>m\), so we write \(M-m\) to keep the fraction positive).
\(
\begin{gathered}
\frac{\theta_0+\theta_1}{\theta_0-\theta_1}=\frac{(M+m)+(M-m)}{(M+m)-(M-m)} \\
\frac{\theta_0+\theta_1}{\theta_0-\theta_1}=\frac{2 M}{2 m}=\frac{M}{m} \\
M=m\left(\frac{\theta_0+\theta_1}{\theta_0-\theta_1}\right)
\end{gathered}
\)
Q61. A particle of mass \(m\) is moving in a straight line with momentum \(p\). Starting at time \(t=0\), a force \(F=k t\) acts in the same direction on the moving particle during time interval \(T\) so that its momentum changes from \(p\) to \(3 p\). Here \(k\) is a constant. The value of \(T\) is : [JEE Main 2019]
(A) \(2 \sqrt{\frac{k}{p}}\)
(B) \(2 \sqrt{\frac{p}{k}}\)
(C) \(\sqrt{\frac{2 p}{2}}\)
(D) \(\sqrt{\frac{2 k}{p}}\)
Solution: (B) To find the value of the time interval \(T\), we use Newton’s Second Law, which relates force to the rate of change of momentum.
Step 1: The Relationship Between Force and Momentum
According to Newton’s Second Law:
\(
F=\frac{d p}{d t}
\)
Rearranging this to solve for the change in momentum ( \(d p\) ):
\(
d p=F d t
\)
Step 2: Set Up the Integration
The force is given as \(F=k t\). The momentum changes from \(p\) to \(3 p\) during the time interval from \(t=0\) to \(t=T\). We integrate both sides within these limits:
\(
\int_p^{3 p} d p=\int_0^T k t d t
\)
Step 3: Solve the Integrals
Left side:
\(
\int_p^{3 p} d p=[p]_p^{3 p}=3 p-p=2 p
\)
Right side:
\(
\int_0^T k t d t=k\left[\frac{t^2}{2}\right]_0^T=\frac{k T^2}{2}
\)
Step 4: Solve for \(T\)
Equating the two results:
\(
2 p=\frac{k T^2}{2}
\)
\(
T=\sqrt{\frac{4 p}{k}}=2 \sqrt{\frac{p}{k}}
\)
Q62. A body of mass 1 kg falls freely from a height of 100 m , on a platform mass 3 kg which is mounted on a spring having spring constant \(k = 1.25 \times 10^6 N / m\). The body sticks to the platform and the spring’s maximum compression is found to be \(x\) . Given that \(g =10 ms^{-2}\), the value of \(x\) will be close to : [JEE Main 2019]
Solution: To find the maximum compression \(x\) of the spring, we break the problem into three phases: the free fall, the inelastic collision with the platform, and the compression of the spring.
Step 1: Velocity Just Before Collision
The body of mass \(m=1 kg\) falls from a height \(h=100 m\). Its velocity \(v\) just before hitting the platform is:
\(
v=\sqrt{2 g h}=\sqrt{2 \times 10 \times 100}=\sqrt{2000}=10 \sqrt{20} \approx 44.72 m / s
\)
Step 2: Velocity Just After Collision
The body sticks to the platform ( \(M=3 kg\) ), making it a perfectly inelastic collision. We use conservation of linear momentum:
\(
\begin{gathered}
m v=(m+M) V \\
1 \times 10 \sqrt{20}=(1+3) V \\
V=\frac{10 \sqrt{20}}{4}=2.5 \sqrt{20} m / s
\end{gathered}
\)
Step 3: Maximum Compression of the Spring
We apply the conservation of energy from the moment of collision to the point of maximum compression. The total energy (Kinetic + Gravitational Potential) just after collision equals the Elastic Potential Energy of the spring at maximum compression.
\(
\frac{1}{2}(m+M) V^2+(m+M) g x=\frac{1}{2} k x^2
\)
Substituting the known values ( \(m+M=4 kg, k=1.25 \times 10^6 N / m\) ):
\(
\begin{gathered}
\frac{1}{2}(4)(2.5 \sqrt{20})^2+(4)(10) x=\frac{1}{2}\left(1.25 \times 10^6\right) x^2 \\
2(6.25 \times 20)+40 x=0.625 \times 10^6 x^2 \\
250+40 x=625,000 x^2
\end{gathered}
\)
Since \(x\) is expected to be very small (in cm ), the \(40 x\) term is negligible compared to 250.
Simplifying:
\(
\begin{gathered}
250 \approx 625,000 x^2 \\
x^2 \approx \frac{250}{625,000}=\frac{1}{2500} \\
x \approx \frac{1}{50} m=0.02 m=2 cm
\end{gathered}
\)
Q63. A piece of wood of mass 0.03 kg is dropped from the top of a 100 m height building. At the same time, a bullet of mass 0.02 kg is fired vertically upward, with a velocity \(100 ms^{-1}\), from the ground. The bullet gets embedded in the wood. Then the maximum height to which the combined system reaches above the top of the building before falling below is – \(\left( g =10 ms^{-2}\right)\) [JEE Main 2019]
Solution: To solve this problem, we need to handle it in three steps: finding the time of collision, calculating the velocity after the bullet embeds, and then determining the maximum height. Step 1: Time of Collision
Let’s use relative motion. Since both the wood and the bullet have the same acceleration ( \(g= 10 m / s ^2\) downward), their relative acceleration is zero.
Initial relative velocity: \(v_{\text {rel }}=u_{\text {bullet }}-u_{\text {wood }}=100-0=100 m / s\)
Relative distance: \(d=100 m\)
\(
t=\frac{d}{v_{r e l}}=\frac{100}{100}=1 s
\)
Step 2: Velocities Just Before Collision
At \(t=1 s\) :
Velocity of wood \(\left(v_w\right): v_w=u+g t=0+10(1)=10 m / s\) (downward)
Velocity of bullet \(\left(v_b\right)\) : \(v_b=u-g t=100-10(1)=90 m / s\) (upward)
Position of collision: The wood has fallen \(h=\frac{1}{2} g t^2=\frac{1}{2}(10)(1)^2=5 m\) from the top.
Step 3: Momentum Conservation
The collision is perfectly inelastic because the bullet gets embedded. Let \(V\) be the common velocity of the system ( \(m_{\text {total }}=0.03+0.02=0.05 kg\) ). Taking upward as positive:
\(
\begin{gathered}
m_b v_b+m_w\left(-v_w\right)=\left(m_b+m_w\right) V \\
(0.02 \times 90)-(0.03 \times 10)=0.05 \times V \\
1.8-0.3=0.05 V \\
1.5=0.05 V \Longrightarrow V=30 m / s \text { (upward) }
\end{gathered}
\)
Step 4: Maximum Height Reached
The system starts at the collision point ( 5 m below the top) and moves up with \(30 m / s\). The additional height \(H\) it rises is:
\(
H=\frac{V^2}{2 g}=\frac{30^2}{2 \times 10}=\frac{900}{20}=45 m
\)
Since the collision happened 5 m below the top, the height reached above the top of the building is:
\(
H_{\text {above }}=45 m-5 m=40 m
\)
The maximum height reached by the combined system above the top of the building is 40 m.
Q64. Two masses \(m\) and \(\frac{m}{2}\) are connected at the two ends of a massless rigid rod of length \(I\). The rod is suspended by a thin wire of torsional constant \(k\) , at the centre of mass of the rod-mass system(see figure). Because of torsional constant \(k\) , the restoring torque is \(\tau= k \theta\) for angular displacement \(\theta\). If the rod is rotated by \(\theta_0\) and released, the tension in it when it passes through its mean position will be : [JEE Main 2019]
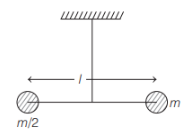
Solution: To find the tension in the rod when it passes through its mean position, we need to analyze the rotation of the two masses about their common center of mass (CM).
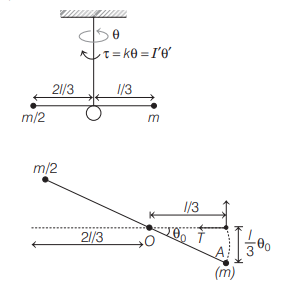
Step 1: Position of the Center of Mass
Let the mass \(m_1=m\) be at the origin and \(m_2=m/2\) be at a distance \(l\). The distance of the center of mass \(\left(r_1\right)\) from mass \(m\) is:
\(
r_1=\frac{m_2 \cdot l}{m_1+m_2}=\frac{(m / 2) l}{m+m / 2}=\frac{l / 2}{3 / 2}=\frac{l}{3}
\)
Consequently, the distance of the CM from mass \(m / 2\) is \(r_2=l-\frac{l}{3}=\frac{2 l}{3}\).
Step 2: Moment of Inertia (I)
The moment of inertia of the system about the CM is:
\(
\begin{gathered}
I=m_1 r_1^2+m_2 r_2^2=m\left(\frac{l}{3}\right)^2+\frac{m}{2}\left(\frac{2 l}{3}\right)^2 \\
I=\frac{m l^2}{9}+\frac{m}{2}\left(\frac{4 l^2}{9}\right)=\frac{m l^2}{9}+\frac{2 m l^2}{9}=\frac{3 m l^2}{9}=\frac{m l^2}{3}
\end{gathered}
\)
Step 3: Maximum Angular Velocity ( \(\omega_{\max }\) )
The rod acts as a torsional pendulum. By conservation of energy, the maximum potential energy stored in the wire at angle \(\theta_0\) equals the maximum rotational kinetic energy at the mean position:
\(
\begin{gathered}
\frac{1}{2} k \theta_0^2=\frac{1}{2} I \omega_{\max }^2 \\
k \theta_0^2=\left(\frac{m l^2}{3}\right) \omega_{\max }^2 \Longrightarrow \omega_{\max }^2=\frac{3 k \theta_0^2}{m l^2}
\end{gathered}
\)
Step 4: Tension in the Rod ( \(T\) )
The tension \(T\) in the rod provides the centripetal force required for the masses to move in a circle about the CM. For mass \(m\) :
\(
T=m \cdot \omega_{\max }^2 \cdot r_1
\)
Substituting the values of \(\omega_{\text {max }}^2\) and \(r_1\) :
\(
\begin{gathered}
T=m \cdot\left(\frac{3 k \theta_0^2}{m l^2}\right) \cdot\left(\frac{l}{3}\right) \\
T=\frac{3 m k \theta_0^2 l}{3 m l^2}=\frac{k \theta_0^2}{l}
\end{gathered}
\)
The tension in the rod when it passes through the mean position is \(\frac{k \theta_0^2}{l}\).
Q65. Three blocks \(A\), \(B\) and \(C\) are lying on a smooth horizontal surface, as shown in the figure. \(A\) and \(B\) have equal masses, \(m\) while \(C\) has mass M , Block A is given an initial speed \(v\) towards B due to which it collides with B perfectly inelastically. The combined mass collides with C, also perfectly inelastically \(\frac{5}{6}\) th of the initial kinetic energy is lost in whole process. What is value of \(M / m\) ? [JEE Main 2019]
Solution: To find the value of \(M / m\), we need to analyze the conservation of momentum through both collisions and compare the final kinetic energy to the initial kinetic energy.
Step 1: Conservation of Momentum
Since the collisions are perfectly inelastic, the blocks stick together after each impact. Because the surface is smooth (frictionless), the total linear momentum of the system is conserved throughout the entire process.
Initial Momentum: Only block \(A\) is moving.
\(
P_i=m \cdot v
\)
Final Momentum: All three blocks ( \(A, B\), and \(C\) ) move together as a single mass with a common final velocity \(V_f\).
\(
P_f=(m+m+M) \cdot V_f=(2 m+M) \cdot V_f
\)
By conservation of momentum \(\left(P_i=P_f\right)\) :
\(
m v=(2 m+M) V_f \Longrightarrow V_f=\frac{m v}{2 m+M}
\)
Step 2: Kinetic Energy Analysis
Initial Kinetic Energy \(\left(K_i\right)\) :
\(
K_i=\frac{1}{2} m v^2
\)
Final Kinetic Energy ( \(K_f\) ):
\(
K_f=\frac{1}{2}(2 m+M) V_f^2
\)
Substitute \(V_f\) :
\(
K_f=\frac{1}{2}(2 m+M)\left(\frac{m v}{2 m+M}\right)^2=\frac{1}{2} \frac{m^2 v^2}{2 m+M}
\)
Step 3: Solving for \(M / m\)
The problem states that \(=\frac{5}{6}\)-th of the initial kinetic energy is lost. This means the remaining energy ( \(K_f\) ) is \(=\frac{1}{6}\)-th of the initial energy ( \(K_i\) ):
\(
\begin{gathered}
K_f=\frac{1}{6} K_i \\
\frac{1}{2} \frac{m^2 v^2}{2 m+M}=\frac{1}{6}\left(\frac{1}{2} m v^2\right)
\end{gathered}
\)
\(
\frac{M}{m}=4
\)