6.13 Angular momentum in case of rotations about a fixed axis
Angular momentum of a rigid body rotating about a fixed axis
The angular momentum of rigid body, i.e. a system of particles is the sum of angular momentum of all the particles within the system.
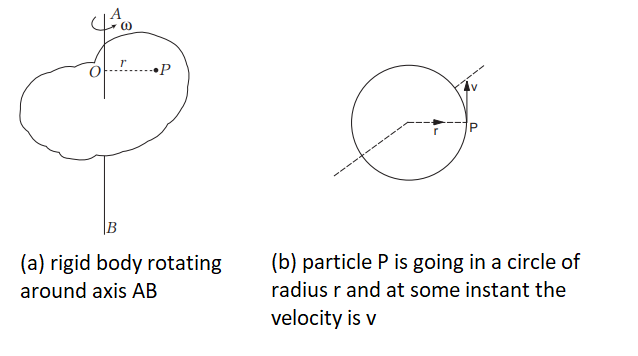
Suppose a particle \(P\) of mass \(m\) is going in a circle of radius \(r\) and at some instant the speed of the particle is \(v\). For finding the angular momentum of the particle about the axis of rotation, the origin may be chosen anywhere on the axis. We choose it at the centre of the circle. In this case, \(\mathbf{r}\) and \(\mathbf{p}\) are perpendicular to each other and \(\mathbf{r} \times \mathbf{p}\) is along the axis. Thus, component of \(\mathbf{r} \times \mathbf{p}\) along the axis is \(m v r\) itself. The angular momentum of the whole rigid body about \(A B\) is the sum of components of all particles, i.e. \(L=\sum_i m_i r_i v_i\)
\(\begin{array}{rlrl} & \text { Here, } v_i =r_i \omega \\ \therefore & L =\sum_i m_i r_i^2 \omega\end{array}\)
\(
L=\omega \sum_i m_i r_i^2
\)
\(L=I \omega \quad\left(\right.\) as \(\left.\sum_i m_i r_i^2=I\right)\)
Here, \(I\) is the moment of inertia of the rigid body about \(A B\).
Relation between torque and angular momentum
The relation between torque and angular momentum can be given as follows
As angular momentum, \(\mathbf{L =} \mathbf{r} \times \mathbf{p}\),
we differentiate \(\boldsymbol{L}=\mathbf{r} \times \mathbf{p}\) with respect to time,
\(
\frac{\mathrm{d} \boldsymbol{L}}{\mathrm{~d} t}=\frac{\mathrm{d}}{\mathrm{~d} t}(\mathbf{r} \times \mathbf{p})
\)
Applying the product rule for differentiation to the right hand side,
\(
\frac{\mathrm{d}}{\mathrm{~d} t}(\mathbf{r} \times \mathbf{p})=\frac{\mathrm{d} \mathbf{r}}{\mathrm{~d} t} \times \mathbf{p}+\mathbf{r} \times \frac{\mathrm{d} \mathbf{p}}{\mathrm{~d} t}
\)
Now, the velocity of the particle is \(\mathbf{v}=d \mathbf{r} / d t\) and \(\mathbf{p}=m \mathbf{v}\)
Because of this \(\frac{\mathrm{d} \mathbf{r}}{\mathrm{d} t} \times \mathbf{p}=\mathbf{v} \times m \mathbf{v}=0\), as the vector product of two parallel vectors vanishes. Further, since \(\mathrm{d} \mathbf{p} / \mathrm{d} t=\mathbf{F}\),
\(
\begin{aligned}
& \mathbf{r} \times \frac{\mathrm{d} \mathbf{p}}{\mathrm{~d} t}=\mathbf{r} \times \mathbf{F}=\mathbf{t} \\
& \text { Hence } \frac{\mathrm{d}}{\mathrm{~d} t}(\mathbf{r} \times \mathbf{p})=\tau_{\mathrm{ext}} \\
& \text { or } \frac{\mathrm{d} \boldsymbol{L}}{\mathrm{~d} t}=\boldsymbol{\tau_{\mathrm{ext}}}
\end{aligned}
\)
Thus, rate of change of angular momentum is equal to the torque due to an external force. This is the rotational analogue of the equation \(\mathbf{F}=\mathrm{d} \mathbf{p} / \mathrm{d} t\), which expresses Newton’s second law for the translational motion of a single particle.
We can write \(\frac{\mathrm{d} \boldsymbol{L}}{\mathrm{~d} t}=\frac{\mathrm{d}}{\mathrm{~d} t}(I \omega)=\tau\)
If the moment of inertia \(I\) does not change with time.
\(
\frac{\mathrm{d}}{\mathrm{~d} t}(I \omega)=I \frac{\mathrm{~d} \omega}{\mathrm{~d} t}=I \alpha
\)
we get
\(
\tau=I \alpha
\)
Conservation of angular momentum
The derivation of conservation of angular momentum stems from Newton’s Second Law for rotation: net torque \(\tau_{\text {net }}\) equals the time rate of change of angular momentum \((L)\), or \(\tau=\frac{d L}{d t}\).
Therefore, if the net external torque on a system is zero ( \(\tau_{\text {net }}=0\) ), then \(\frac{d L}{d t}=0\), meaning angular momentum ( \(L\) ) remains constant over time, leading to the principle \(L_{\text {initial }}=L_{\text {final }}\) or \(I_i \omega_i=I_f \omega_f\).
Example 1: An ice skater with arms extended (large \(\boldsymbol{I}\) ) spins at \(4.5 \mathrm{rad} / \mathrm{s}\). She pulls her arms in (decreasing \(I\) to 40% of original), and her speed increases by how much?
Solution:
\(
\begin{aligned}
& L_{\text {initial }}=I_{\text {initial }} \times 4.5 \mathrm{rad} / \mathrm{s} \\
& L_{\text {final }}=\left(0.4 \times I_{\text {initial }}\right) \times \omega_{\text {final }} \\
& I_{\text {initial }} \times 4.5=\left(0.4 \times I_{\text {initial }}\right) \times \omega_{\text {final }} \\
& \omega_{\text {final }}=\frac{4.5}{0.4}=11.25 \mathrm{rad} / \mathrm{s} \text { (She spins faster!). }
\end{aligned}
\)
Example 2: A child is standing with folded hands at the centre of a platform rotating about its central axis. The kinetic energy of the system is \(K\). The child now stretches his arms so that the moment of inertia of the system doubles. The kinetic energy of the system now is ___.
Solution: Conservation of Angular Momentum: Since there are no external torques acting on the system (friction is neglected), the angular momentum ( \(L\) ) of the system remains constant. The angular momentum is given by \(L=I \omega\), where \(I\) is the moment of inertia and \(\omega\) is the angular velocity.
Initial State: The initial moment of inertia is \(I_1=I\), and the initial kinetic energy is \(K_1=K\). The initial kinetic energy is given by the formula \(K_1=\frac{1}{2} I_1 \omega_1^2=\frac{L^2}{2 I_1}\).
Final State: The child stretches his arms, and the new moment of inertia doubles, so \(I_2=2 I_1=2 I\).
Final Angular Velocity: Due to the conservation of angular momentum ( \(L_1=L_2\) ), the new angular velocity \(\omega_2\) decreases:
\(I_1 \omega_1=I_2 \omega_2\)
\(I \omega_1=2 I \omega_2\)
\(\omega_2=\frac{\omega_1}{2}\)
Final Kinetic Energy: The new kinetic energy \(K_2\) is:
\(K_2=\frac{1}{2} I_2 \omega_2^2=\frac{1}{2}(2 I)\left(\frac{\omega_1}{2}\right)^2=\frac{1}{2}(2 I) \frac{\omega_1^2}{4}=\frac{1}{4} I \omega_1^2\)
Alternatively, using angular momentum: \(K_2=\frac{L^2}{2 I_2}=\frac{L^2}{2\left(2 I_1\right)}=\frac{1}{2}\left(\frac{L^2}{2 I_1}\right)=\frac{1}{2} K_1\)
Result: The final kinetic energy \(\boldsymbol{K}_2\) is half the initial kinetic energy \(\boldsymbol{K}_1\). So, the new kinetic energy is \(\mathbf{K} \boldsymbol{/} \mathbf{2}\).