13.3 Simple harmonic motion and uniform circular motion
Simple Harmonic Motion and Uniform Circular Motion
At first glance, Simple Harmonic Motion (SHM) (back-and-forth oscillation) and Uniform Circular Motion (UCM) (moving in a circle at constant speed) look like completely different types of physics.
However, SHM is actually just the 1D projection of UCM. If you shine a light from the side of a rotating object, the shadow it casts on the wall will move in perfect Simple Harmonic Motion.
The Visual Relationship:
Imagine a particle moving at a constant speed \(v\) around a circle of radius \(A\). If we track only the \(x\)-coordinate (or \(y\)-coordinate) of that particle over time, we see it oscillate between \(+A\) and \(-A\).
Amplitude \((A)\) : The radius of the circle in UCM becomes the maximum displacement (amplitude) in SHM.
Angular Velocity (\(\omega\)): The speed at which the object rotates in the circle is exactly the “angular frequency” of the oscillation.
Period (\(T\)): The time it takes to complete one full lap is the same as the time it takes for one full back-and-forth swing.

Looking at an object going around in a circle of radius, \(A\), from the top view gives the relationships involving period, \(\mathbf{T}\) in seconds/cycle, frequency, \({f}\) in cycles/sec, and angular frequency, \({\omega}\) in rad \(/ \mathrm{sec}\) and the direction of velocity \(v_{\tan }\) at a time \(t\) is along the tangent to the circle at the point where the particle is located at that instant.
\(
v_{\tan }=\frac{2 \pi A}{T}
\)
\(
\begin{aligned}
&\text { and rearranging gives }\\
&\frac{v_{\tan }}{A}=\frac{2 \pi}{T}=2 \pi f=\omega A
\end{aligned}
\)
and \(\frac{2 \pi}{T}=\omega\)
so \(2 \pi f=\omega\)
Note: The speed of a particle \(v\) in uniform circular motion is its angular speed \(\omega\) times the radius of the circle \(A\).
\(v=\omega A\)
Looking at that same object going around in a circle of radius, \(\mathbf{A}\), from the edge view reveals that the linear back and forth motion of the object is equivalent to the horizontal motion of an object on the end of a spring. Therefore, the radius, \(\mathbf{A}\), is the same as the maximum amplitude of the mass-spring system and \(\mathbf{v}_{\tan }\) is the same as the maximum velocity of the mass as it passes through the position of the relaxed spring.

Circular motion of a ball in a plane viewed edge-on is SHM
We show that the projection of uniform circular motion on a diameter of the circle follows simple harmonic motion. A simple experiment (Fig. 14.9) helps us visualise this connection. Tie a ball to the end of a string and make it move in a horizontal plane about a fixed point with a constant angular speed. The ball would then perform a uniform circular motion in the horizontal plane. The ball will appear to execute to and fro motion along a horizontal line with the point of rotation as the midpoint.
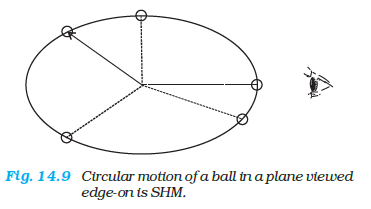
Fig. 14.10 describes the same situation mathematically. Suppose a particle \(P\) is moving uniformly on a circle of radius \(A\) with angular speed \(\omega\). The sense of rotation is anticlockwise.
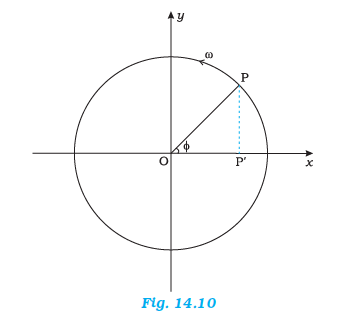
The initial position vector of the particle, i.e., the vector \(\overline{\mathbf{O P}}\) at \(t=0\) makes an angle of \(\phi\) with the positive direction of \(x\)-axis. In time \(t\), it will cover a further angle \(\omega t\) and its position vector will make an angle of \(\omega t+\phi\) with the + ve \(x\)-axis. Next, consider the projection of the position vector OP on the \(x\)-axis. This will be \(\mathrm{OP}^{\prime}\). The position of \(\mathrm{P}^{\prime}\) on the \(x\)-axis, as the particle P moves on the circle, is given by
The initial position vector of the particle, i.e., the vector \(\overline{\mathbf{O P}}\) at \(t=0\) makes an angle of \(\phi\) with the positive direction of \(x\)-axis. In time \(t\), it will cover a further angle \(\omega t\) and its position vector will make an angle of \(\omega t+\phi\) with the + ve \(x\)-axis. Next, consider the projection of the position vector OP on the \(x\)-axis. This will be \(\mathrm{OP}^{\prime}\). The position of \(\mathrm{P}^{\prime}\) on the \(x\)-axis, as the particle P moves on the circle, is given by
\(
x(t)=A \cos (\omega t+\phi)
\)
which is the defining equation of SHM. This shows that if P moves uniformly on a circle, its projection \(\mathrm{P}^{\prime}\) on a diameter of the circle executes SHM. The particle P and the circle on which it moves are sometimes referred to as the reference particle and the reference circle, respectively.
We can take projection of the motion of P on any diameter, say the \(y\)-axis. In that case, the displacement \(y(t)\) of \(\mathrm{P}^{\prime}\) on the \(y\)-axis is given by
\(
y=A \sin (\omega t+\phi)
\)
which is also an SHM of the same amplitude as that of the projection on \(x\)-axis, but differing by a phase of \(\pi / 2\).
In spite of this connection between circular motion and SHM, the force acting on a particle in linear simple harmonic motion is very different from the centripetal force needed to keep a particle in uniform circular motion.
Simple Harmonic Motion as a projection of Circular motion
Consider a particle \(P\) moving on a circle of radius \(A\) with a constant angular speed \(\omega\) (figure below). Let us take the centre of the circle as the origin and two perpendicular diameters as the \(X\) and \(Y\)-axes. Suppose the particle \(P\) is on the \(X\)-axis at \(t=0\). The radius \(O P\) will make an angle \(\theta=\omega t\) with the \(X\)-axis at time \(t\). Drop perpendicular \(P Q\) on \(X\)-axis and \(P R\) on \(Y\)-axis. The \(x\) and \(y\)-coordinates of the particle at time \(t\) are
\(
\begin{array}{ll}
& x=O Q=O P \cos \omega t \\
\text { or, } & x=A \cos \omega t \dots(i)\\
\text { and } & y=O R=O P \sin \omega t \\
\text { or, } & y=A \sin \omega t \dots(ii)
\end{array}
\)
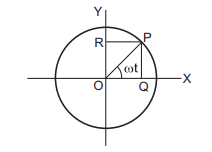
Equation (i) shows that the foot of perpendicular \(Q\) executes a simple harmonic motion on the \(X\)-axis. The amplitude is \(A\) and the angular frequency is \(\omega\). Similarly, equation (ii) shows that the foot of perpendicular \(R\) executes a simple harmonic motion on the \(Y\)-axis. The amplitude is \(A\) and the angular frequency is \(\omega\). The phases of the two simple harmonic motions differ by \(\pi / 2\) [remember \(\cos \omega t=\sin (\omega t+\pi / 2)]\).
Thus, the projection of a uniform circular motion on a diameter of the circle is a simple harmonic motion.
Angular Simple Harmonic Motion
When an object oscillates back and forth about a central position along a circular path, it undergoes Angular Simple Harmonic Motion (ASHM). This is the rotational equivalent of linear SHM. Instead of a restoring force proportional to displacement (\(F=-k x\)), we deal with a restoring torque proportional to angular displacement.
Angular simple harmonic motion is a type of motion in which an object rotates to and fro about a reference line and angular acceleration is directly proportional to angular displacement and directed towards the mean line. For example, a photo frame or a calendar suspended from a nail on the wall. If it is slightly pushed from its mean position and released, it makes angular oscillations.
The angular oscillations are called angular simple harmonic motion if
(a) there is a position of the body where the resultant torque on the body is zero, this position is the mean position \(\theta=0\),
(b) when the body is displaced through an angle from the mean position, a resultant torque acts which is proportional to the angle displaced, and
(c) this torque has a sense (clockwise or anticlockwise) so as to bring the body towards the mean position.
Let us consider a balanced wheel of moment of inertia (\(I\)) attached to a wire, suspended with the help of a rigid support, oscillates about the axis (the suspension wire) passing through its centre. When the balance wheel is rotated, the wire exerts restoring torque. Let OA be the equilibrium line (mean line) as shown in figure below. Let at any instant, the wheel rotates and makes an angle \(\theta\) with the equilibrium line such that \(\angle \mathrm{AOB}=\theta\)
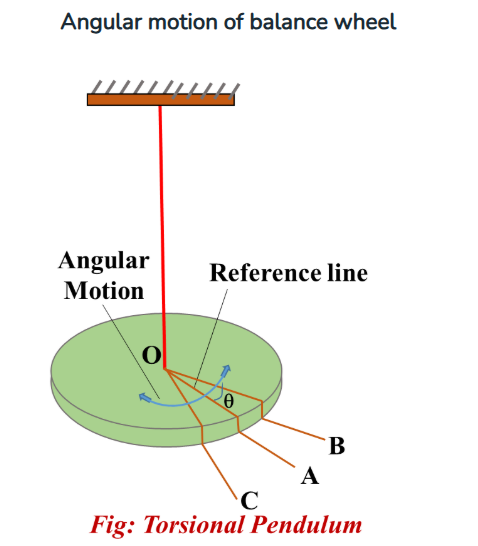
Experimentally it is found that the restoring torque \(\tau\) is directly proportional to the angular displacement \(\theta\)
i.e. \(\tau \propto \theta\)
Or, \(\tau=-{k} \theta\) [The -ve sign indicates that the torque is restoring]
Where:
\(\tau\) is the restoring torque.
\(\theta\) is the angular displacement (in radians).
\(k\) is the torsional constant (torque per unit radian).
From Newton’s Second Law for rotation, we know:
\(
\tau=I \alpha
\)
Where \(I\) is the moment of inertia and \(\alpha\) is the angular acceleration.
Equating the two expressions for torque:
\(
\begin{gathered}
I \alpha=-k \theta \\
I \frac{d^2 \theta}{d t^2}=-k \theta
\end{gathered}
\)
Rearranging into the standard differential equation form:
\(
\frac{d^2 \theta}{d t^2}+\left(\frac{k}{I}\right) \theta=0
\)
Comparing this to the general SHM equation \(\frac{d^2 x}{d t^2}+\omega^2 x=0\), we find the angular frequency (\(\omega\)):
\(
\omega=\sqrt{\frac{k}{I}}
\)
Time Period and Frequency:
From the angular frequency, we can derive the period of oscillation (\(T\)):
The Period (\(T\)):
Since \(T=\frac{2 \pi}{\omega}\) :
\(
T=2 \pi \sqrt{\frac{I}{k}}
\)
The Frequency (\(f\))
Since \(f=\frac{1}{T}\) :
\(
f=\frac{1}{2 \pi} \sqrt{\frac{k}{I}}
\)
Displacement, Velocity, and Acceleration
The motion follows the same sinusoidal patterns as linear SHM. The linear displacement \(x\) is replaced here by the angular displacement \(\theta\).
Angular Displacement:
\(\theta(t)=\theta_0 \cos (\omega t+\phi)\) (where \(\theta_0\) is the maximum angular displacement on either side (maximum amplitude in Linear SHM)).
Angular velocity:
The angular velocity at time \(t\) is given by,
\(
\Omega=\frac{d \theta}{d t}=-\theta_0 \omega \cos (\omega t+\phi) .
\)
The time period of oscillation is
\(
T=\frac{2 \pi}{\omega}=2 \pi \sqrt{\frac{I}{k}}
\)
and the frequency of oscillation is
\(
f=\frac{1}{T}=\frac{1}{2 \pi} \sqrt{\frac{k}{I}} .
\)
The quantity \(\omega=\sqrt{k I^{-1}}\) is the angular frequency.
Angular Acceleration:
\(\alpha=\frac{d^2 \theta}{d t^2}=-\omega^2 \theta\).
Example 1: The figure given below depicts two circular motions. The radius of the circle, the period of revolution, the initial position and the sense of revolution are indicated in the figures. Obtain the simple harmonic motions of the \(x\)-projection of the radius vector of the rotating particle P in each case.
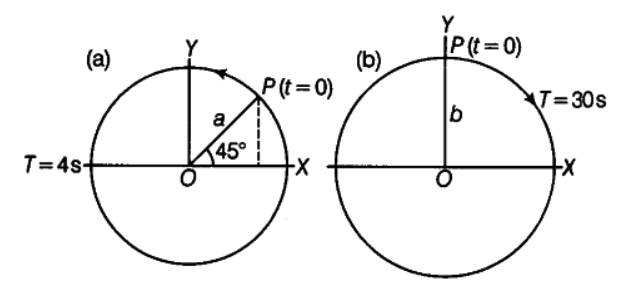
Solution:
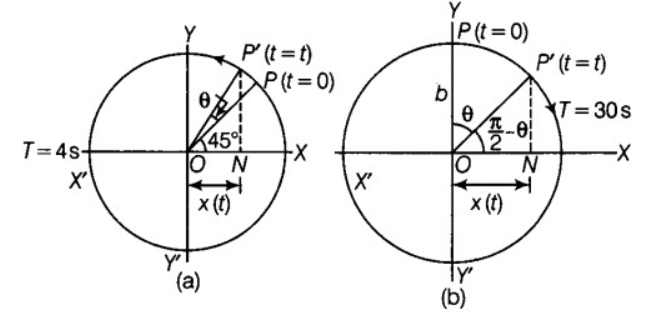
In figure, suppose the particle moves in the anti-clockwise sense from P to \(\mathrm{P}^{\prime}\) in time t as shown in Fig. (a).
Angle swept by the radius vector,
\(
\theta=\omega t=\frac{2 \pi}{T} t=\frac{2 \pi}{4} t \quad[\because T=4 \mathrm{~s}]
\)
\(N\) is the foot of perpendicular drawn from \(P^{\prime}\) on the \(X O X^{\prime}\)-axis.
Displacement,
\(
\begin{aligned}
O N & =O P^{\prime} \cos (\theta+\pi / 4) \\
\text { or } \quad x(t) & =a \cos \left(\frac{2 \pi}{4} t+\frac{\pi}{4}\right)
\end{aligned}
\)
This equation represents SHM of amplitude \(a\), period \(4 s\) and an initial phase of \(\frac{\pi}{4} \mathrm{rad}\).
This equation represents SHM of amplitude \(a\), period \(4 s\) and an initial phase of \(\frac{\pi}{4} \mathrm{rad}\).
Now, in Fig. (b), suppose the particle moves in the clockwise sense from \(P\) to \(P^{\prime}\) in time \(t\).
Angle swept by the radius vector,
\(
\theta=\omega t=\frac{2 \pi}{T} t=\frac{2 \pi}{30} t \quad[\because T=30 \mathrm{~s}]
\)
Displacement,
\(
\begin{aligned}
O N & =O P^{\prime} \cos \left(\frac{\pi}{2}-\theta\right) \\
\text { or } \quad x(t) & =b \cos \left(\frac{\pi}{2}-\frac{2 \pi}{30} t\right) \\
\text { or } \quad x(t) & =b \cos \left(\frac{2 \pi}{30} t-\frac{\pi}{2}\right) \quad[\because \cos (-\theta)=\cos \theta]
\end{aligned}
\)
This equation represents SHM of amplitude \(b\) period \(30 s\) and an initial phase of \(-\frac{\pi}{2} \mathrm{rad}\).