1.1 Introduction
The Scalar Product
The scalar product or dot product of any two vectors \(\mathbf{A}\) and \(\mathbf{B}\), denoted as \(A \cdot B\) (read \(\mathbf{A}\) dot \(\mathbf{B}\)) is defined as
\(
\mathbf{A} \cdot \mathbf{B}=A B \cos \theta \dots(6.1a)
\)
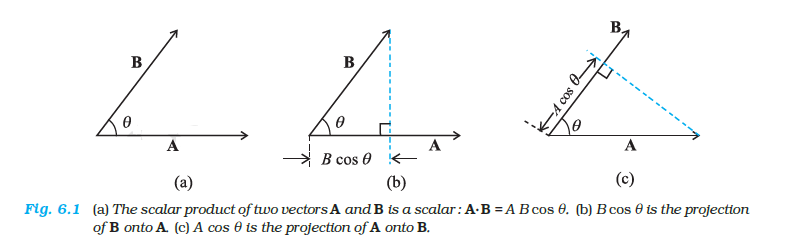
where \(\theta\) is the angle between the two vectors as shown in Fig. 6.1(a). Since \(A, B\) and \(\cos \theta\) are scalars, the dot product of \(\mathbf{A}\) and \(\mathbf{B}\) is a scalar quantity. Each vector, \(\mathbf{A}\) and \(\mathbf{B}\), has a direction but their scalar product does nolt have a direction.
\(
\begin{aligned}
\mathbf{A} \cdot \mathbf{B} & =A(B \cos \theta) \\
& =B(A \cos \theta)
\end{aligned}
\)
Geometrically, \(B \cos \theta\) is the projection of \(\mathbf{B}\) onto A in Fig.6.1 (b) and \(A \cos \theta\) is the projection of \(\mathbf{A}\) onto B in Fig. 6.1 (c). So, A.B is the product of the magnitude of \(\mathbf{A}\) and the component of \(\mathbf{B}\) along A. Alternatively, it is the product of the magnitude of \(\mathbf{B}\) and the component of \(\mathbf{A}\) along \(\mathbf{B}\).
Equation (6.1a) shows that the scalar product follows the commutative law :
\(
\mathbf{A} \cdot \mathbf{B}=\mathbf{B} \cdot \mathbf{A}
\)
Scalar product obeys the distributive law:
\(
\mathbf{A} \cdot(\mathbf{B}+\mathbf{C})=\mathbf{A} \cdot \mathbf{B}+\mathbf{A} \cdot \mathbf{C}
\)
Further, \(\quad \mathbf{A} \cdot(\lambda \mathbf{B})=\lambda(\mathbf{A} \cdot \mathbf{B})\) where \(\lambda\) is a real number.
The proofs of the above equations are left to you as an exercise.
For unit vectors \(\hat{\mathbf{i}}, \hat{\mathbf{j}}, \hat{\mathbf{k}}\) we have
\(
\begin{aligned}
& \hat{\mathbf{i}} \cdot \hat{\mathbf{i}}=\hat{\mathbf{j}} \cdot \hat{\mathbf{j}}=\hat{\mathbf{k}} \cdot \hat{\mathbf{k}}=1 \\
& \hat{\mathbf{i}} \cdot \hat{\mathbf{j}}=\hat{\mathbf{j}} \cdot \hat{\mathbf{k}}=\hat{\mathbf{k}} \cdot \hat{\mathbf{i}}=0
\end{aligned}
\)
Given two vectors
\(
\begin{aligned}
& \mathbf{A}=A_x \hat{\mathbf{i}}+A_y \hat{\mathbf{j}}+A_z \hat{\mathbf{k}} \\
& \mathbf{B}=B_x \hat{\mathbf{i}}+B_y \hat{\mathbf{j}}+B_z \hat{\mathbf{k}}
\end{aligned}
\)
their scalar product is
\(
\begin{aligned}
& \mathbf{A} \cdot \mathbf{B}=\left(A_x \hat{\mathbf{i}}+A_y \hat{\mathbf{j}}+A_z \hat{\mathbf{k}}\right) \cdot\left(B_x \hat{\mathbf{i}}+B_y \hat{\mathbf{j}}+B_z \hat{\mathbf{k}}\right) \\
& =A_x B_x+A_y B_y+A_z B_z \dots(6.1b)
\end{aligned}
\)
From the definition of scalar product and (Eq. 6.1b) we have :
(1) A.A \(=A_x A_x+A_y A_y+A_z A_z\)
Or, \(\quad A^2=A_x^2+A_y^2+A_z^2 \dots(6.1c)\)
since \(\mathbf{A} \cdot \mathbf{A}=|\mathbf{A}||\mathbf{A}| \cos 0=A^2\).
(ii) \(\mathbf{A} \cdot \mathbf{B}=0\), if \(\mathbf{A}\) and \(\mathbf{B}\) are perpendicular.
Example 1:
\(\begin{aligned}
& \text { Find the angle between force } \\
& \mathbf{F}=(3 \hat{\mathbf{i}}+4 \hat{\mathbf{j}}-5 \hat{\mathbf{k}}) \text { unit and displacement } \\
& \mathrm{d}=(5 \hat{\mathbf{i}}+4 \hat{\mathbf{j}}+3 \hat{\mathbf{k}}) \text { unit. Also, find the } \\
& \text { projection of } \mathbf{F} \text { on } \mathbf{d} \text {. }
\end{aligned}
\)
Solution:
\(
\begin{aligned}
\mathbf{F} \cdot \mathbf{d} & =F_x d_x+F_y d_y+F_z d_z \\
& =3(5)+4(4)+(-5)(3) \\
& =16 \text { unit }
\end{aligned}
\)
Hence \(\mathbf{F} \cdot \mathbf{d}=F d \cos \theta=16\) unit
Now \(
\mathbf{F} \cdot \mathbf{F}
\)
\(
\begin{aligned}
& =F^2=F_x^2+F_y^2+F_z^2 \\
& =9+16+25 \\
& =50 \text { unit }
\end{aligned}
\)
\(
\text { and } \mathbf{d} \cdot \mathbf{d} \quad=d^2=d_x^2+d_y^2+d_z^2
\)
\(
\begin{aligned}
& =25+16+9 \\
& =50 \text { unit }
\end{aligned}
\)
\(
\begin{aligned}
\therefore \cos \theta & =\frac{16}{\sqrt{50} \sqrt{50}}=\frac{16}{50}=0.32, \\
& \theta=\cos ^{-1} 0.32
\end{aligned}
\)
Work, Energy and Power
Work, energy, and power are fundamental physics concepts: work is the transfer of energy by a force moving an object, energy is the capacity to do work, and power is the rate at which work is done or energy is transferred. Work is measured in joules (J), energy is also measured in joules (J), and power is measured in watts (W).
Work
Definition: Work is done when a force applied to an object causes a displacement in the direction of the force. Work is the dot product of the force ( \(\vec{F}\) ) and displacement ( \(\vec{d}\) ) vectors: \(W=\vec{F} \cdot \vec{d}=F d \cos (\theta)\), where \(\theta\) is the angle
Formula: \(W=\vec{F} \cdot \vec{d}=F \times d \times \cos (\theta)\), where \(W\) is work, \(F\) is the magnitude of the force, \(d\) is the magnitude of the displacement, and \(\boldsymbol{\theta}\) is the angle between the force and displacement vectors.
Key facts:
Positive Work: When force and displacement are in the same direction, the angle \(\boldsymbol{\theta}\) is \(0^{\circ}\). Since \(\cos \left(0^{\circ}\right)=1\), the work equation becomes \(W=F d\), a positive value. This adds energy to the object.
Negative Work: When force and displacement are in opposite directions, the angle \(\theta\) is \(180^{\circ}\). Since \(\cos \left(180^{\circ}\right)=-1\), the work equation becomes \(W=-F d\), a negative value. This removes energy from the object.
Zero Work (Perpendicular Force): When the force is perpendicular to the displacement, the angle \(\theta\) is \(90^{\circ}\). Since \(\cos \left(90^{\circ}\right)=0\), the work equation becomes \(W=F d \cdot 0=0\). Only the force component parallel to the motion does work.
Zero Work (No Displacement): If there is no displacement, the magnitude of displacement \(d\) is zero. The equation \(W=F d \cos (\theta)\) becomes \(W=F \cdot 0 \cdot \cos (\theta)=0\), regardless of the force applied or angle.