6.1 Introduction
Systems of particles and rotational motion analyze how collections of objects (or parts of a single object) move, focusing on their overall center of mass and individual circular paths around an axis, introducing concepts like torque, angular momentum, and moment of inertia to describe turning effects, inertia to rotation, and conservation principles, extending classical mechanics to spinning and rolling bodies like planets or spinning tops.
Key Concepts:
System of Particles: A collection of discrete masses (particles) where forces can be internal (between particles) or external (from outside).
Center of Mass (CM): The average position of all mass in a system; it moves as if all mass were concentrated there, influenced only by external forces.
Rigid Body: A system where the distance between particles doesn’t change, allowing for distinct translational (CM movement) and rotational motion.
Rotation: Motion around a fixed axis where each particle traces a circle in a plane perpendicular to the axis.
Torque \((\tau)\) : The rotational equivalent of force; a turning effect, calculated as force times the perpendicular lever arm.
Moment of Inertia \((I)\): A body’s resistance to changes in its rotation, depending on mass distribution relative to the axis ( \(I=M R^2\) for a point mass).
Angular Momentum \((L)\): The rotational equivalent of linear momentum, related to moment of inertia and angular velocity ( \(L=I \omega\) ).
How They Work Together
Combined Motion: A rigid body’s general motion is a combination of its center of mass translating and the body rotating about an axis through the CM (e.g., a spinning basketball).
Conservation Laws: Just as linear momentum is conserved in the absence of external forces, angular momentum is conserved for a system in the absence of external torques, explaining planetary orbits or spinning ice skaters.
Examples:
Planetary Motion: The Earth’s spin (rotation) and orbit (around the Sun) are a complex system of rotational and orbital motions.
Spinning Top: Shows both translational motion (its CM moving) and rotational motion (spinning on its axis).
Exploding Projectile: The CM follows the original parabolic path, while fragments fly off in different directions due to internal forces, demonstrating the CM’s independence from internal motion.
What kind of motion can a rigid body have?
Case-I: Translational motion:
Let us take some examples of the motion of rigid bodies. Let us begin with a rectangular block sliding down an inclined plane without any sidewise movement. The block is a rigid body. Its motion down the plane is such that all the particles of the body are moving together, i.e. they have the same velocity at any instant of time. The rigid body here is in pure translational motion.
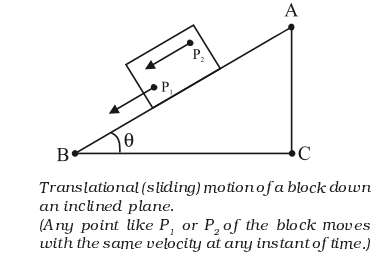
Remark: In pure translational motion at any instant of time every particle of the body has the same velocity.
Case-II: Rolling motion:
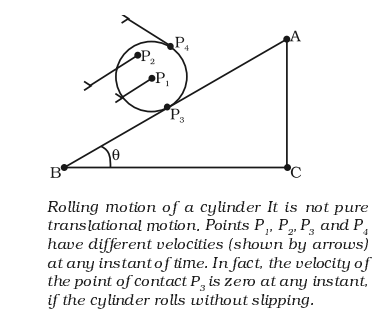
Consider now the rolling motion of a solid metallic or wooden cylinder down the same inclined plane (Figure below). The rigid body in this problem, namely the cylinder, shifts from the top to the bottom of the inclined plane, and thus, has translational motion. But as Figure shows, all its particles are not moving with the same velocity at any instant. The body therefore, is not in pure translation. Its motion is translation plus ‘something else.’
In order to understand what this ‘something else’ is, let us take a rigid body so constrained that it cannot have translational motion. The most common way to constrain a rigid body so that it does not have translational motion is to fix it along a straight line. The only possible motion of such a rigid body is rotation.
Case-III: Rotational motion:
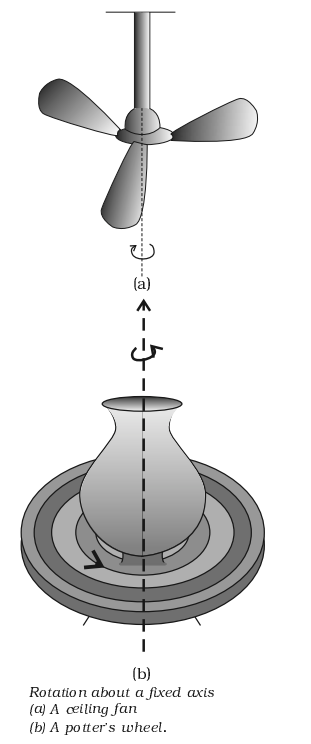
The line along which the body is fixed is termed as its axis of rotation. If you look around, you will come across many examples of rotation about an axis, a ceiling fan, a potter’s wheel, a giant wheel in a fair, a merry-go-round and so on (Fig (a) and (b)).
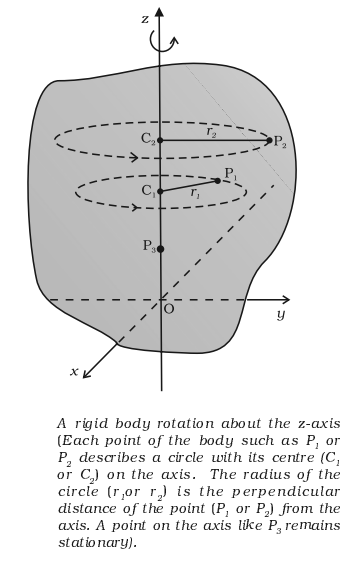
Let us try to understand what rotation is, what characterises rotation. You may notice that in rotation of a rigid body about a fixed axis, every particle of the body moves in a circle, which lies in a plane perpendicular to the axis and has its centre on the axis. Figure below shows the rotational motion of a rigid body about a fixed axis (the \(z\)-axis of the frame of reference). Let \(P_1\) be a particle of the rigid body, arbitrarily chosen and at a distance \(r_1\) from fixed axis. The particle \(P_1\) describes a circle of radius \(r_1\) with its centre \(\mathrm{C}_1\) on the fixed axis. The circle lies in a plane perpendicular to the axis. The figure also shows another particle \(P_2\) of the rigid body, \(\mathrm{P}_2\) is at a distance \(r_2\) from the fixed axis. The particle \(P_2\) moves in a circle of radius \(r_2\) and with centre \(\mathrm{C}_2\) on the axis. This circle, too, lies in a plane perpendicular to the axis. Note that the circles described by \(P_1\) and \(P_2\) may lie in different planes; both these planes, however, are perpendicular to the fixed axis. For any particle on the axis like \(\mathrm{P}_3, r=0\). Any such particle remains stationary while the body rotates. This is expected since the axis is fixed.
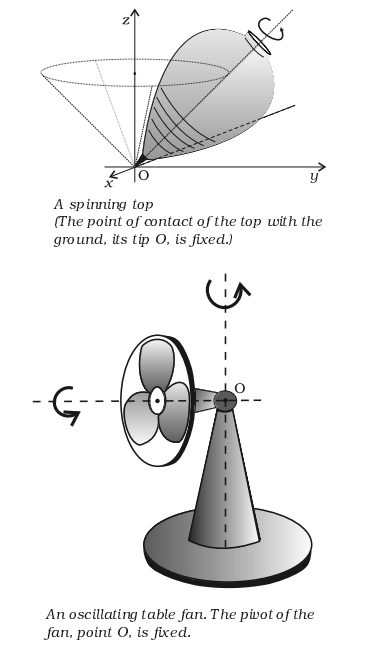
In some examples of rotation, however, the axis may not be fixed. A prominent example of this kind of rotation is a top spinning in place [Figure(a)]. (We assume that the top does not slip from place to place and so does not have translational motion.) We know from experience that the axis of such a spinning top moves around the vertical through its point of contact with the ground, sweeping out a cone as shown in Figure(a). (This movement of the axis of the top around the vertical is termed precession.) Note, the point of contact of the top with ground is fixed. The axis of rotation of the top at any instant passes through the point of contact. Another simple example of this kind of rotation is the oscillating table fan or a pedestal fan. You may have observed that the axis of rotation of such a fan has an oscillating (sidewise) movement in a horizontal plane about the vertical through the point at which the axis is pivoted (point O in Figure(b)).